上は時間領域で表現された矩形関数 f (t )f̂ (ω )f̂ (ω )Sinc関数 である。下は時間遅れのある矩形関数 g (t )ĝ (ω )平行移動 (ディレイ )は、周波数領域では虚数部の位相シフトとして表現される。 数学 においてフーリエ変換 (フーリエへんかん、英 : Fourier transform 、FT)は、実 変数 の複素 または実 数値関数
f
{\displaystyle f}
ˆ f 変換 である。
工学においては、変換後の関数ˆ f
f
{\displaystyle f}
f
{\displaystyle f}
周波数領域 表現 (frequency domain representation
f
{\displaystyle f}
正弦波・余弦波 に分解するとも言える。
フーリエ変換 (FT) は他の多くの数学的な演算と同様にフーリエ解析 の主題を成す。特別の場合として、もとの関数とその周波領域表現が連続 かつ非有界 である場合を考えることができる。「フーリエ変換」という言葉は関数の周波数領域表現のことを指すこともあるし、関数を周波数領域表現へ写す変換の過程・公式を言うこともある。なおこの呼称は、19世紀フランスの数学者・物理学者で次元解析 の創始者とされるジョゼフ・フーリエ に由来する。
絶対可積分 関数 f : R → C
f
^
(
ξ
)
:=
∫
−
∞
∞
f
(
x
)
e
−
2
π
i
x
ξ
d
x
{\displaystyle {\hat {f}}(\xi ):=\int _{-\infty }^{\infty }f(x)e^{-2\pi ix\xi }\,dx}
を定義として用いる。ここでギリシャ文字小文字の ξ #その他の定義 )
対象の関数における独立変数が物理量 の場合、フーリエ変換は独立変数の次元 をもとの逆数 に移す。例えば、変換前の関数における独立変数 x 時間 の次元をもつとき、変換後の独立変数 ξ 周波数 の次元を持つ。あるいは、変換前の独立変数 x 長さ の次元をもつとき、変換後の独立変数 ξ 波数 の次元を持つ。この性質は定義より x ξ 無次元量 であることから従う。
適当な条件のもと、f ˆ f フーリエ逆変換 (inverse transform )
f
(
x
)
:=
∫
−
∞
∞
f
^
(
ξ
)
e
2
π
i
x
ξ
d
ξ
{\displaystyle f(x):=\int _{-\infty }^{\infty }{\hat {f}}(\xi )e^{2\pi ix\xi }\,d\xi }
によって復元することができる(x
上記の絶対可積分関数の定義では、次のような関数は
∫
−
∞
∞
|
f
(
x
)
|
d
x
=
∞
{\displaystyle \int _{-\infty }^{\infty }|f(x)|dx=\infty }
f
(
x
)
=
c
{\displaystyle f(x)=c}
c
{\displaystyle c}
f
(
x
)
=
x
n
{\displaystyle f(x)=x^{n}}
n
{\displaystyle n}
周期関数(
f
(
x
)
=
0
{\displaystyle f(x)=0}
このように、周期関数のようなフーリエ級数展開が可能な関数が、絶対可積分関数の意味でフーリエ変換できないことは非常に不便であり、またフーリエ変換の理解を難しくしている。
そこで、フーリエ変換の定義を超関数に拡張することが行われる。
超関数とは、急減少関数(シュワルツ空間 の元である関数)の列
{
f
n
(
x
)
}
n
=
1
∞
{\displaystyle \{f_{n}(x)\}_{n=1}^{\infty }}
ϕ
(
x
)
{\displaystyle \phi (x)}
lim
n
→
∞
∫
−
∞
∞
f
n
(
x
)
ϕ
(
x
)
d
x
{\displaystyle \lim _{n\to \infty }\int _{-\infty }^{\infty }f_{n}(x)\phi (x)dx}
{
f
n
(
x
)
}
n
=
1
∞
{\displaystyle \{f_{n}(x)\}_{n=1}^{\infty }}
{
g
n
(
x
)
}
n
=
1
∞
{\displaystyle \{g_{n}(x)\}_{n=1}^{\infty }}
ϕ
(
x
)
{\displaystyle \phi (x)}
lim
n
→
∞
∫
−
∞
∞
f
n
(
x
)
ϕ
(
x
)
d
x
=
lim
n
→
∞
∫
−
∞
∞
g
n
(
x
)
ϕ
(
x
)
d
x
{\displaystyle \lim _{n\to \infty }\int _{-\infty }^{\infty }f_{n}(x)\phi (x)dx=\lim _{n\to \infty }\int _{-\infty }^{\infty }g_{n}(x)\phi (x)dx}
{
f
n
(
x
)
}
{\displaystyle \{f_{n}(x)\}}
{
g
n
(
x
)
}
{\displaystyle \{g_{n}(x)\}}
イメージとしては、超関数は関数列の極限であるが、関数列自体が超関数であり、
lim
n
→
∞
f
n
(
x
)
{\displaystyle \lim _{n\to \infty }f_{n}(x)}
急減少関数は絶対可積分関数であるため、絶対可積分関数としてのフーリエ変換が定義されるが、急減少関数のフーリエ変換は急減少関数になるという性質がある。この性質を利用し、次のように超関数のフーリエ変換が定義される。
定義 急減少関数の列である超関数
{
f
n
(
x
)
}
n
=
1
∞
{\displaystyle \{f_{n}(x)\}_{n=1}^{\infty }}
{
∫
−
∞
∞
f
n
(
x
)
e
−
2
π
i
x
ξ
d
x
}
n
=
1
∞
{\displaystyle \{\int _{-\infty }^{\infty }f_{n}(x)e^{-2\pi ix\xi }dx\}_{n=1}^{\infty }}
例
f
(
x
)
=
c
{\displaystyle f(x)=c}
c
{\displaystyle c}
{
c
exp
(
−
x
2
/
n
)
}
{\displaystyle \{c\exp(-x^{2}/n)\}}
lim
n
→
∞
c
exp
(
−
x
2
/
n
)
=
c
{\displaystyle \lim _{n\to \infty }c\exp(-x^{2}/n)=c}
ϕ
(
x
)
{\displaystyle \phi (x)}
lim
n
→
∞
∫
−
∞
∞
c
exp
(
−
x
2
/
n
)
ϕ
(
x
)
d
x
=
∫
−
∞
∞
c
ϕ
(
x
)
d
x
{\displaystyle \lim _{n\to \infty }\int _{-\infty }^{\infty }c\exp(-x^{2}/n)\phi (x)dx=\int _{-\infty }^{\infty }c\phi (x)dx}
そのフーリエ変換は急減少関数の列である超関数
{
∫
−
∞
∞
c
exp
(
−
x
2
/
n
−
2
π
i
x
ξ
)
d
x
}
=
{
c
exp
(
−
n
π
2
ξ
2
)
∫
−
∞
∞
exp
(
−
(
x
+
n
π
i
ξ
)
2
/
n
)
d
x
}
{\displaystyle \{\int _{-\infty }^{\infty }c\exp(-x^{2}/n-2\pi ix\xi )dx\}=\{c\exp(-n\pi ^{2}\xi ^{2})\int _{-\infty }^{\infty }\exp(-(x+n\pi i\xi )^{2}/n)dx\}}
=
{
c
n
π
exp
(
−
n
π
2
ξ
2
)
}
{\displaystyle =\{c{\sqrt {n\pi }}\exp(-n\pi ^{2}\xi ^{2})\}}
ここで、
ξ
≠
0
{\displaystyle \xi \neq 0}
lim
n
→
∞
n
π
exp
(
−
n
π
2
ξ
2
)
=
0
{\displaystyle \lim _{n\to \infty }{\sqrt {n\pi }}\exp(-n\pi ^{2}\xi ^{2})=0}
ξ
=
0
{\displaystyle \xi =0}
lim
n
→
∞
n
π
exp
(
−
n
π
2
ξ
2
)
=
∞
{\displaystyle \lim _{n\to \infty }{\sqrt {n\pi }}\exp(-n\pi ^{2}\xi ^{2})=\infty }
∫
−
∞
∞
n
π
exp
(
−
n
π
2
ξ
2
)
d
ξ
=
1
{\displaystyle \int _{-\infty }^{\infty }{\sqrt {n\pi }}\exp(-n\pi ^{2}\xi ^{2})d\xi =1}
f
(
x
)
=
c
{\displaystyle f(x)=c}
c
δ
(
ξ
)
{\displaystyle c\delta (\xi )}
この節の記載は、フーリエ変換の「動機」についてのものであるが、フーリエ変換の理解に必須のものではなく、むしろ理解を妨げる要因(数学的に不正確な内容を含む)もあるため、注意が必要である。フーリエ変換についてのイメージを掴むには有用であるが、この節の理解に拘泥するとむしろ本質的な理解が阻害されることになる。すなわち、以下の段落では [−T /2, T /2]でのフーリエ級数展開を考察し、T → ∞として、[−∞, ∞]でのフーリエ変換を考えようとするものであるが、[−T /2, T /2]と[−∞, ∞]では全く様相が異なり、[−T /2, T /2]ではどのような連続関数もフーリエ級数展開可能であるが、[−∞, ∞]では拡張されたフーリエ級数展開(フーリエ変換)ができない連続関数が多数存在し、n次関数、三角関数、指数関数、対数関数はどれもフーリエ変換ができない。任意のTについて、[−T /2, T /2]である命題が言えたとしても、[−∞, ∞]ではその命題が成り立たない典型例となっており、単純にT → ∞として、[−∞, ∞]での結論を導き出すことはできない。
フーリエ変換を考える動機はフーリエ級数 の研究に始まる。フーリエ級数の研究において、複雑な周期関数は単純な波動の数学的な表現である正弦関数 や余弦関数 の和として表される。正弦や余弦の性質のおかげで、この和に現れる各波の量、フーリエ係数を積分によって計算することができる。
多くの場合に、
e
2
π
i
θ
=
cos
2
π
θ
+
i
sin
2
π
θ
{\textstyle e^{2\pi i\theta }=\cos {2\pi \theta }+i\sin {2\pi \theta }}
オイラーの公式 )を用いて、正弦関数および余弦関数の代りに基本波動
e
2
π
i
θ
{\textstyle e^{2\pi i\theta }}
複素指数関数 への移行にはフーリエ係数が複素数値であることを要する。この複素数は、関数に含まれる波動の振幅 (あるいは大きさ)と、位相 (あるいは初期角)の両方を与えているものと通常は解釈される。また、この移行に際して「負の周波数」も導入される。例えば、波動
e
2
π
i
θ
{\textstyle e^{2\pi i\theta }}
e
−
2
π
i
θ
{\textstyle e^{-2\pi i\theta }}
逆数 と考えることはできなくなる。
フーリエ級数を以下のようにしてフーリエ変換の動機付けに用いることができる。関数 ƒ をある区間 [−L /2, L /2] の外側で 0 となるようなものとすると、任意の T ≥ L に対して ƒ を区間 [−T /2, T /2] 上のフーリエ級数に拡張できる。ここで f のフーリエ級数に現れる波動
e
2
π
i
n
x
/
T
{\textstyle e^{2\pi inx/T}}
c
n
{\textstyle c_{n}}
f
^
(
n
T
)
=
c
n
:=
∫
−
T
/
2
T
/
2
e
−
2
π
i
n
x
/
T
f
(
x
)
d
x
{\displaystyle {\hat {f}}{\Big (}{\dfrac {n}{T}}{\Big )}=c_{n}:=\int _{-T/2}^{T/2}e^{-2\pi inx/T}f(x)\,dx}
で与えられ、ƒ は公式
f
(
x
)
=
1
T
∑
n
=
−
∞
∞
f
^
(
n
T
)
e
2
π
i
n
x
/
T
{\displaystyle f(x)={\frac {1}{T}}\sum _{n=-\infty }^{\infty }{\hat {f}}{\Big (}{\dfrac {n}{T}}{\Big )}e^{2\pi inx/T}}
で与えられなければならない。ξn n /T とおき、Δξ = (n + 1)/T − n /T = 1/T とおくと、最後の和をリーマン和
f
(
x
)
=
∑
n
=
−
∞
∞
f
^
(
n
T
)
e
2
π
i
x
ξ
n
Δ
ξ
{\displaystyle f(x)=\sum _{n=-\infty }^{\infty }{\hat {f}}{\Big (}{\dfrac {n}{T}}{\Big )}e^{2\pi ix\xi _{n}}\Delta \xi }
として考えることができる。T → ∞ とすることにより、このリーマン和は定義節で与えられるフーリエ逆変換に収束する。適当な条件の下では、この議論をもっと明確化することができる。したがって、この場合はフーリエ級数だが、フーリエ変換は関数に含まれる個々の特定の周波数がどの程度あるかを測るものと考えることができ、それらの波動を積分(あるいは「連続和」)によって再結合して元の関数を復元することができる。
以下の画像はフーリエ変換が特定の関数に含まれる周波数を測る方法を視覚的に現したものである。関数として、(t が秒で測られる場合には)3 ヘルツで振動し、急速に 0 になる
f
(
t
)
:=
cos
(
6
π
t
)
e
−
π
t
2
{\displaystyle f(t):=\cos(6\pi t)e^{-\pi t^{2}}}
を描く。この関数は特に描画しやすい実フーリエ変換をもつものとして選ばれたものであり、最初の画像はそのグラフである。ˆ f e −2πi (3t ) ƒ (t ) を積分する。二枚目の画像はこの被積分関数の実部および虚部である。被積分関数の実部は殆ど常に正となる。これは ƒ (t ) が負であるときには e −2πi (3t ) の実部が同様に負となることによる。それらは同じ比率で振動するから、ƒ (t ) が正であるときも同様に e −2πi (3t ) の実部も正になる。
この結果、被積分関数の実部のを積分すれば、比較的大きな数値(ここでの場合 0.5)を得ることになる。
一方、(ˆ f ƒ (t ) に含まれる個々の周波数がどれくらいあるかを測るものという考え方に変わりはない。
3ヘルツの振動を示すもとの関数
3ヘルツにおけるフーリエ変換の被積分関数の実部および虚部
5ヘルツにおけるフーリエ変換の被積分関数の実部および虚部
3ヘルツおよび5ヘルツでラベル付けされたフーリエ変換
実数直線上で定義される関数 f が絶対可積分 であるとは、
∫
−
∞
∞
|
f
(
x
)
|
d
x
<
∞
{\displaystyle \int _{-\infty }^{\infty }|f(x)|\,dx<\infty }
を満たすルベーグ可測関数 であることをいう。
絶対可積分関数 f (x ), g (x ), h (x )ˆ f ξ )ˆ g ξ )ˆ h ξ )
線型性 任意の複素数 a , b について h (x ) = aƒ (x ) + bg (x )
h
^
(
ξ
)
=
a
⋅
f
^
(
ξ
)
+
b
⋅
g
^
(
ξ
)
{\displaystyle {\hat {h}}(\xi )=a\cdot {\hat {f}}(\xi )+b\cdot {\hat {g}}(\xi )}
が成り立つ。
平行移動 任意の実数 x 0 h (x ) = ƒ (x − x 0 )
h
^
(
ξ
)
=
e
−
2
π
i
x
0
ξ
f
^
(
ξ
)
{\displaystyle {\hat {h}}(\xi )=e^{-2\pi ix_{0}\xi }{\hat {f}}(\xi )}
が成り立つ。
変調 任意の実数 ξ 0 h (x ) = e 2πixξ 0 ƒ (x )
h
^
(
ξ
)
=
f
^
(
ξ
−
ξ
0
)
{\displaystyle {\hat {h}}(\xi )={\hat {f}}(\xi -\xi _{0})}
が成り立つ。
定数倍 非零実数 a に対し、h (x ) = ƒ (ax )
h
^
(
ξ
)
=
1
|
a
|
f
^
(
ξ
a
)
{\displaystyle {\hat {h}}(\xi )={\frac {1}{|a|}}{\hat {f}}{\Big (}{\frac {\xi }{a}}{\Big )}}
が成り立つ。a = −1h (x ) = ƒ (−x )時間反転性 (time-reversal property
h
^
(
ξ
)
=
f
^
(
−
ξ
)
{\displaystyle {\hat {h}}(\xi )={\hat {f}}(-\xi )}
が導かれる。
複素共役 f (x )複素共役 f (x )
f
¯
^
(
ξ
)
=
f
^
(
−
ξ
)
¯
{\displaystyle {\hat {\overline {f}}}(\xi )={\overline {{\hat {f}}(-\xi )}}}
が成り立つ。
畳み込み h (x ) = (f ∗ g )(x )
h
^
(
ξ
)
=
f
^
(
ξ
)
⋅
g
^
(
ξ
)
{\displaystyle {\hat {h}}(\xi )={\hat {f}}(\xi )\cdot {\hat {g}}(\xi )}
が成り立つ。
絶対可積分関数のフーリエ変換は、常に成り立つというわけではない性質も持っている。絶対可積分関数 ƒ のフーリエ変換は一様連続で
‖
f
^
‖
∞
≤
‖
f
‖
1
{\displaystyle \|{\hat {f}}\|_{\infty }\leq \|f\|_{1}}
を満たす。絶対可積分関数のフーリエ変換は
f
^
(
ξ
)
→
0
as
|
ξ
|
→
∞
{\displaystyle {\hat {f}}(\xi )\to 0{\text{ as }}|\xi |\to \infty }
であることを述べたリーマン・ルベーグの補題 f のフーリエ変換 ˆ f 逆変換 をルベーグ積分として書くことは一般にはできない。しかしながら、ƒ および ˆ f
f
(
x
)
=
∫
−
∞
∞
f
^
(
ξ
)
e
2
i
π
x
ξ
d
ξ
{\displaystyle f(x)=\int _{-\infty }^{\infty }{\hat {f}}(\xi )e^{2i\pi x\xi }\,d\xi }
が殆ど全ての x において成り立つ。つまり、ƒ は右辺で定義される連続関数と殆ど至る所等しい。特に ƒ が実数直線上の連続関数として与えられたならば全ての x において等式が成り立つ。
前述の結果としてわかることは、フーリエ変換が L 1 (R ) 上単射であることである。
f (x ) および g (x ) は絶対可積分であるとし、そのフーリエ変換をそれぞれ ˆ f ˆ g f (x ) および g (x ) がともに自乗絶対可積分であるならばパーセバルの定理
∫
−
∞
∞
f
(
x
)
g
(
x
)
¯
d
x
=
∫
−
∞
∞
f
^
(
ξ
)
g
^
(
ξ
)
¯
d
ξ
{\displaystyle \int _{-\infty }^{\infty }f(x){\overline {g(x)}}\,dx=\int _{-\infty }^{\infty }{\hat {f}}(\xi ){\overline {{\hat {g}}(\xi )}}\,d\xi }
が成立する。ここで上付きバーは複素共役を表す。
パーセバルの定理と同値なプランシュレルの定理 によれば
∫
−
∞
∞
|
f
(
x
)
|
2
d
x
=
∫
−
∞
∞
|
f
^
(
ξ
)
|
2
d
ξ
{\displaystyle \int _{-\infty }^{\infty }|f(x)|^{2}\,dx=\int _{-\infty }^{\infty }|{\hat {f}}(\xi )|^{2}\,d\xi }
が成立する。プランシュレルの定理により、L 2 (R ) に属する関数の後述 する意味でのフーリエ変換を定義することが可能になる。プランシュレルの定理は、フーリエ変換はもとの量のエネルギーを保存するという自然科学における解釈を持つ。著者によってはこれらの定理のどちらともをプランシュレルの定理あるいはパーセバルの定理と呼んでいる場合があるので注意を要する。
局所コンパクトアーベル群に関する文脈におけるフーリエ変換の概念の一般の定式化についてはポントリャーギン双対 の項を参照されたい。
一般的に言って、f (x ) が凝縮されればされるほどそのフーリエ変換 ˆ f x において「圧搾」するならば、そのフーリエ変換は ξ において「伸展」される。したがって、関数とそのフーリエ変換の両方ともを勝手に凝縮させることはできない。
関数とそのフーリエ変換のコンパクト化のあいだの得失評価は不確定性関係 の形で定式化することができる。ƒ (x ) は絶対可積分かつ自乗絶対可積分 であると仮定する。一般性を失うことなく関数 ƒ (x ) は
∫
−
∞
∞
|
f
(
x
)
|
2
d
x
=
1
{\displaystyle \int _{-\infty }^{\infty }|f(x)|^{2}\,dx=1}
に正規化されているものと仮定してよい。このとき、プランシュレルの定理により ˆ f
x = 0 の周りでの拡散を
D
0
(
f
)
:=
∫
−
∞
∞
x
2
|
f
(
x
)
|
2
d
x
{\displaystyle D_{0}(f):=\int _{-\infty }^{\infty }x^{2}|f(x)|^{2}\,dx}
で定義される「0 の周りでの分散」(dispersion about zero ) によって測ることにする。確率の言葉で言えば、これは |f (x )|2 の 0 の周りでの二次のモーメント である。
このとき不確定性原理は、関数 ƒ (x ) が絶対連続で、関数 x ·ƒ (x ) および ƒ ′(x ) が自乗絶対可積分であるならば
D
0
(
f
)
D
0
(
f
^
)
≥
1
16
π
2
{\displaystyle D_{0}(f)D_{0}({\hat {f}})\geq {\frac {1}{16\pi ^{2}}}}
が成り立つことを述べる。等式が成立するのは
f
(
x
)
=
C
1
e
−
π
x
2
/
σ
2
{\displaystyle f(x)=C_{1}\,e^{{-\pi x^{2}}/{\sigma ^{2}}}}
したがって、
f
^
(
ξ
)
=
σ
C
1
e
−
π
σ
2
ξ
2
{\displaystyle {\hat {f}}(\xi )=\sigma C_{1}\,e^{-\pi \sigma ^{2}\xi ^{2}}}
である場合に限る。ただし、定数 σ > 0 は任意であり、係数 C 1 は ƒ を L 2 -正規化する定数である。言い換えれば、 ƒ は 0 を中心に持つ(正規化)ガウス関数 のとき等号が成り立つ。
事実として、この不等式は任意の x 0 , ξ0 ∈ R について
[
∫
−
∞
∞
(
x
−
x
0
)
2
|
f
(
x
)
|
2
d
x
]
[
∫
−
∞
∞
(
ξ
−
ξ
0
)
2
|
f
^
(
ξ
)
|
2
d
ξ
]
≥
1
16
π
2
{\displaystyle {\Big [}\int _{-\infty }^{\infty }(x-x_{0})^{2}|f(x)|^{2}\,dx{\Big ]}{\Big [}\int _{-\infty }^{\infty }(\xi -\xi _{0})^{2}|{\hat {f}}(\xi )|^{2}\,d\xi {\Big ]}\geq {\frac {1}{16\pi ^{2}}}}
が成立することをも含む。
量子力学 において、運動量 と位置 の波動関数 は(プランク定数 を因子に持つ)フーリエ変換対である。プランク定数でスケールしなおせば、上述の不等式はロバートソンの不確定性関係を記述する。これは、ハイゼンベルグ が構想した不確定性原理そのものではないが、深い関係がある。
ポアソン和公式はフーリエ変換とフーリエ級数の間の関連性を提供する。絶対可積分関数 ƒ ∈ L 1 (R n ƒ の周期化 が
f
¯
(
x
)
=
∑
k
∈
Z
n
f
(
x
+
k
)
{\displaystyle {\bar {f}}(x)=\sum _{k\in \mathbb {Z} ^{n}}f(x+k)}
によって与えられる。このとき、ポアソン和公式は f ƒ のフーリエ変換に結びつけるもので、特に f
f
¯
(
x
)
∼
∑
k
∈
Z
n
f
^
(
k
)
e
2
π
i
k
⋅
x
{\displaystyle {\bar {f}}(x)\sim \sum _{k\in \mathbb {Z} ^{n}}{\hat {f}}(k)e^{2\pi ik\cdot x}}
で与えられることを述べるものである。ポアソン和公式を用いて、大きな次元のユークリッド球面における格子点の数に対するランダウの漸近公式を導出することができる。また、絶対可積分函数 f と ˆ f ƒ = 0 を示すこともできる。
フーリエ変換は、関数の畳み込み と関数の(点毎の)積とを相互に変換する。ƒ (x ) および g (x ) が絶対可積分関数であるとし、そのフーリエ変換をそれぞれ ˆ f ˆ g ƒ と g との畳み込みが存在して絶対絶対可積分であるならば、この畳み込みのフーリエ変換はフーリエ変換 ˆ f ˆ g
これを式で表せば、∗ を畳み込みとして
h
(
x
)
:=
(
f
∗
g
)
(
x
)
:=
∫
−
∞
∞
f
(
y
)
g
(
x
−
y
)
d
y
{\displaystyle h(x):=(f*g)(x):=\int _{-\infty }^{\infty }f(y)g(x-y)\,dy}
と表されるとき、
h
^
(
ξ
)
=
f
^
(
ξ
)
⋅
g
^
(
ξ
)
{\displaystyle {\hat {h}}(\xi )={\hat {f}}(\xi )\cdot {\hat {g}}(\xi )}
が成立することを意味する。線型時不変 (LTI) 系理論 において、f (x ) を単位インパルス で置き換えたものが h (x ) = g (x ) を与えることから、通例 g (x ) は、入力 ƒ (x ) と出力 h (x ) に関する LTI 系のインパルス応答 として解釈される。この場合、ˆ g 周波数応答 を表す。
逆に、ƒ (x ) がふたつの自乗絶対可積分函数 p (x ) および q (x ) の積に分解されるならば、 ƒ (x ) のフーリエ変換は、各因子のフーリエ変換 ˆ p ˆ q
同様の方法で、h (x ) が ƒ( x) と g( x) との相互相関
h
(
x
)
:=
(
f
⋆
g
)
(
x
)
:=
∫
−
∞
∞
f
(
y
)
¯
g
(
x
+
y
)
d
y
{\displaystyle h(x):=(f\star g)(x):=\int _{-\infty }^{\infty }{\overline {f(y)}}\,g(x+y)\,dy}
であるならば h (x ) のフーリエ変換が
h
^
(
ξ
)
=
f
^
(
ξ
)
¯
g
^
(
ξ
)
{\displaystyle {\hat {h}}(\xi )={\overline {{\hat {f}}(\xi )}}\,{\hat {g}}(\xi )}
で与えられることが示される。
L 2 (R ) の正規直交基底の重要な一つはエルミート函数系
ψ
n
(
x
)
:=
2
4
n
!
e
−
π
x
2
H
n
(
2
x
π
)
{\displaystyle {\psi }_{n}(x):={\frac {\sqrt[{4}]{2}}{\sqrt {n!}}}\,e^{-\pi x^{2}}H_{n}(2x{\sqrt {\pi }})}
で与えられる。ここで H n x ) は「確率論者の」エルミート多項式 と呼ばれる、
H
n
(
x
)
:=
(
−
1
)
n
e
x
2
/
2
D
n
e
−
x
2
/
2
{\displaystyle H_{n}(x):=(-1)^{n}e^{x^{2}/2}D^{n}e^{-x^{2}/2}}
ψ
^
n
(
ξ
)
=
(
−
i
)
n
ψ
n
(
ξ
)
{\displaystyle {\hat {\psi }}_{n}(\xi )=(-i)^{n}{\psi }_{n}(\xi )}
で与えられる。言い換えれば、エルミート関数系は L 2 (R ) 上のフーリエ変換の固有関数 からなる完全正規直交系 を成す。しかしながら、この固有関数系の選び方は一意ではなく、フーリエ変換の相異なる固有値 は {±1, ±i } の 4 つしかなく、同じ固有値に属する固有関数の任意の線型結合はふたたび固有関数になる。この結果として L 2 (R ) を 4 つの空間 H 0 , H 1 , H 2 , H 3 で、フーリエ変換が H k i k ウィーナー による[ 8] 非整数次フーリエ変換 が得られることにある [要出典 。
A
k
{\displaystyle {\mathcal {A}}_{k}}
k の斉次 調和 多項式 全体の成す集合を表す。集合
A
k
{\displaystyle {\mathcal {A}}_{k}}
体球面調和関数系 (英語版 )
A
k
{\displaystyle {\mathcal {A}}_{k}}
P (x ) に対し、f (x ) = e −π|x |2 P (x ) のフーリエ変換は
f
^
(
ξ
)
=
i
−
k
f
(
ξ
)
{\displaystyle {\hat {f}}(\xi )=i^{-k}f(\xi )}
で与えられる。集合
H
k
{\displaystyle {\mathcal {H}}_{k}}
f (|x |)P (x ) (P (x ) ∈
A
k
{\displaystyle {\mathcal {A}}_{k}}
L 2 (R n L 2 (R n
H
k
{\displaystyle {\mathcal {H}}_{k}}
H
k
{\displaystyle {\mathcal {H}}_{k}}
H
k
{\displaystyle {\mathcal {H}}_{k}}
ƒ (x ) = ƒ 0 (|x |)P (x ) (P (x ) ∈
A
k
{\displaystyle {\mathcal {A}}_{k}}
f
^
(
ξ
)
=
F
0
(
|
ξ
|
)
P
(
ξ
)
{\displaystyle {\hat {f}}(\xi )=F_{0}(|\xi |)P(\xi )}
となる。ただし、
F
0
(
r
)
=
2
π
i
−
k
r
−
(
n
+
2
k
−
2
)
/
2
∫
0
∞
f
0
(
s
)
J
(
n
+
2
k
−
2
)
/
2
(
2
π
r
s
)
s
(
n
+
2
k
)
/
2
d
s
{\displaystyle F_{0}(r)=2\pi i^{-k}r^{-(n+2k-2)/2}\int _{0}^{\infty }f_{0}(s)J_{(n+2k-2)/2}(2\pi rs)s^{(n+2k)/2}\,ds}
であり、J (n + 2k − 2)/2 は次数 (n + 2k − 2)/2 の第一種ベッセル関数 である。k = 0 のとき、これは動径関数のフーリエ変換に対する有用な公式を与える。
フーリエ変換の定義を他の函数空間に対するものへ拡張することができる。コンパクト 台を持つ滑らかな函数は絶対可積分で、その全体は L 2 (R ) において稠密 であるから、プランシュレルの定理 を用いて、L 2 (R ) の一般の函数にまで(コンパクト台をもつ滑らかな函数によって近似して)フーリエ変換の定義を拡張することができる。さらに
F
:
L
2
(
R
)
→
L
2
(
R
)
{\displaystyle {\mathcal {F}}\colon L^{2}(\mathbb {R} )\to L^{2}(\mathbb {R} )}
はユニタリ作用素 である。フーリエ変換の多くの性質はこの場合にもそのまま成立する。ハウスドルフ・ヤング不等式 を用いて 1 ≤ p ≤ 2 に対する L p R ) の函数を含むようにフーリエ変換の定義を拡張することができる。
だが、さらなる拡張はもっと技巧的である。2 < p < ∞ の範囲でのL p p > 2 に関する L p
フーリエ変換は勝手な次元 n において考えることができる。1-次元の場合と同様にさまざまな流儀があるが、本項では絶対可積分函数 ƒ (x ) に対して、
f
^
(
ξ
)
=
F
(
f
)
(
ξ
)
=
∫
R
n
f
(
x
)
e
−
2
π
i
x
⋅
ξ
d
x
{\displaystyle {\hat {f}}(\xi )={\mathcal {F}}(f)(\xi )=\int _{\mathbb {R} ^{n}}f(x)e^{-2\pi ix\cdot \xi }\,dx}
をフーリエ変換の定義とする。ここで、x および ξ は n -次元ベクトル であり、x · ξ はベクトルの点乗積 である。点乗積はしばしば <x , ξ> とも書き表される。
プランシュレルの定理やパーセバルの定理がそうであるように、上述の基本性質は n -次元フーリエ変換においても成立する。函数が絶対可積分であるとき、フーリエ変換はやはり一様連続であり、リーマン・ルベーグの補題が成立する。
より高い次元ではフーリエ変換の制限問題の研究が興味深いものになる。絶対可積分函数のフーリエ変換は連続で、この函数の任意の集合への制限が定義される。しかし自乗絶対可積分函数のフーリエ変換は自乗絶対可積分函数の一般の類を成す。そのような L 2 (R n p ≤ 2 に対する L p S の曲率が非零であるようないくつかの場合には、フーリエ変換の S への制限を定義することができる。S が R n ステイン の制限定理によれば、フーリエ変換の R n p ≤ (2n + 2)/(n + 3) に対する L p
1-次元の場合と多次元の場合とで、フーリエ変換の大きな違いは部分和作用素に関係する。与えられた絶対可積分函数 ƒ に対し
f
R
(
x
)
=
∫
S
R
f
^
(
ξ
)
e
2
π
i
x
⋅
ξ
d
ξ
,
x
∈
R
n
{\displaystyle f_{R}(x)=\int _{S_{R}}{\hat {f}}(\xi )e^{2\pi ix\cdot \xi }\,d\xi ,\quad x\in \mathbb {R} ^{n}}
で定義される函数 ƒ R ƒ が L p R n n = 1 で 1 < p < ∞ とし、S R R , R ) と置くと、ヒルベルト変換 の有界性から ƒ R R を無限大に飛ばす極限で ƒ に L p n > 1 の場合にも同様であることを期待するかもしれない。S R R の立方体とするならば、確かに部分和作用素はもとの函数に収束する。別の自然な候補としてユークリッド球体 S R R } をとると、部分和作用素が収束するためには単位球体に対するマルチプライヤーが Lp (R n n ≥ 2 に対しては、単位球体に対するマルチプライヤーは p = 2 でない限り有界にはならないというよく知られたチャールズ・フェファーマン の定理がある[ 8] p ≠ 2 のときには ƒ R ƒ に L p ƒ ∈ L p R n ƒ R L p
R n
μ
^
(
ξ
)
=
∫
R
n
e
−
2
π
i
x
⋅
ξ
d
μ
{\displaystyle {\hat {\mu }}(\xi )=\int _{\mathbb {R} ^{n}}e^{-2\pi ix\cdot \xi }\,d\mu }
によって与えられる。この変換は絶対可積分函数のフーリエ変換がもつ多くの性質を引き続き満足する。大きな違いの一つに、測度に関してリーマン・ルベーグの補題が成り立たないことが挙げられる。d μ = ƒ (x )dx の場合には上述の定義式を f の通常のフーリエ変換の定義に簡約化することができる。
このフーリエ変換を用いて連続測度の特徴づけを与えることができる。ボホナーの定理 (英語版 )
さらに言えば、ディラックのデルタ函数 は函数ではないが有限ボレル測度であり、そのフーリエ変換は定数函数となる(特殊値は用いるフーリエ変換の形に依存する)。
フーリエ変換はシュワルツ函数 全体の成す空間(シュワルツ空間 )をそれ自身に移す同相写像 を与える。これにより、緩増加超函数 のフーリエ変換を定義することができる。これには上述の絶対可積分函数が全て含まれ、それに加えて緩増加超函数のフーリエ変換がふたたび緩増加超函数となるという利点がある。
超函数のフーリエ変換を定義するいくつかの動機は、以下のふたつの事実に由来する。ひとつめは、ƒ と g が絶対可積分函数でそのフーリエ変換をそれぞれ ˆ f ˆ g
∫
R
n
f
^
(
x
)
g
(
x
)
d
x
=
∫
R
n
f
(
x
)
g
^
(
x
)
d
x
{\displaystyle \int _{\mathbb {R} ^{n}}{\hat {f}}(x)g(x)\,dx=\int _{\mathbb {R} ^{n}}f(x){\hat {g}}(x)\,dx}
に従うこと。ふたつめは、任意の絶対可積分函数 ƒ は、任意のシュワルツ函数 φ に対して
T
f
(
φ
)
=
∫
R
n
f
(
x
)
φ
(
x
)
d
x
{\displaystyle T_{f}(\varphi )=\int _{\mathbb {R} ^{n}}f(x)\varphi (x)\,dx}
を満たすという条件によって超函数 T ƒ T に対してそのフーリエ変換を、任意のシュワルツ函数 φ に対して
T
^
(
φ
)
=
T
(
φ
^
)
{\displaystyle {\hat {T}}(\varphi )=T({\hat {\varphi }})}
なる関係式によって定義する。これは ˆ T f T f ^
超函数は微分可能であり、緩増加超函数のフーリエ変換と微分および畳み込みとはやはり上述の意味で両立する。
フーリエ変換を任意の局所コンパクトアーベル群 に対して一般化することができる。局所コンパクトアーベル群とは、抽象アーベル群 であると同時に局所コンパクト なハウスドルフ空間 であって、なおかつその位相に関して群演算が連続となるものである。G が局所コンパクトアーベル群ならば、G はハール測度 と呼ばれる平行移動不変な測度 μ を持つ。また、局所コンパクトアーベル群 G に対して、その位相を指標全体の成す集合 ˆ G ˆ G L 1 (G ) に属する函数 f に対して、そのフーリエ変換を
f
^
(
ξ
)
=
∫
G
ξ
(
x
)
f
(
x
)
d
μ
(
∀
ξ
∈
G
^
)
{\displaystyle {\hat {f}}(\xi )=\int _{G}\xi (x)f(x)\,d\mu \qquad \left(\forall \ \xi \in {\hat {G}}\right)}
によって定義することができる。
この一般化を概周期函数 に適用した理論 や、準周期函数 に適用した理論 が知られている。
フーリエ変換および近い関係にあるラプラス変換 は微分方程式 の解法において広く用いられる。f (x )ˆ f 2πi ξˆ f で与えられるという意味でフーリエ変換と微分作用素 は両立する。このことを用いて微分方程式を代数方程式に変換することができる。ただし、この手法は定義域が実数全体である場合にしか適用できないことに注意が必要である。これを拡張して、定義域が R n 偏微分方程式 を代数方程式に書き換えることもできる。
フーリエ変換を可能な限り最も一般な定義域上で考えることが望ましいことも多々ある。フーリエ変換を積分として定義すれば、定義域は絶対可積分函数全体の成す空間に自然に制限されてしまうが、不幸にして絶対可積分函数のフーリエ変換として得られる函数の簡単な特徴づけは知られていない。フーリエ変換の定義域の拡張は上述のようにいくつかの方法を用いて行うことができる。以下いくつか、フーリエ変換の定義されるより広範な定義域と領域について詳細を述べる。
シュワルツ函数 全体の成す空間(シュワルツ空間 )はフーリエ変換の下で閉じている。シュワルツ函数は急減少函数であって、フーリエ変換の関連する函数すべてを含んでいるわけではない。より詳細は (Stein & Weiss 1971 ) を参照せよ。ルベーグ絶対可積分函数全体の成す空間 L 1 はフーリエ変換によって、無限遠で 0 に収束する連続函数全体の成す空間 C 0 へ写される。
自乗絶対可積分函数全体の成す空間 L 2 はフーリエ変換のもとで閉じている。しかしここでのフーリエ変換はもはや積分によって定義されるものではない。
空間 L p L q p + 1/q = 1 であり、 1 ≤ p ≤ 2 とする(ハウスドルフ・ヤング不等式)。
緩増加超函数 全体の成す集合はフーリエ変換の下で閉じている。緩増加超函数は函数の一般化ともなっている。この一般化ではディラックの櫛型函数 のようなもののフーリエ変換も定義することができる。フーリエ変換の記法として ˆ f
F
(
ξ
)
,
F
(
f
)
(
ξ
)
,
(
F
f
)
(
ξ
)
,
F
(
f
(
t
)
)
{\displaystyle F(\xi ),\quad {\mathcal {F}}(f)(\xi ),\quad ({\mathcal {F}}f)(\xi ),\quad {\mathcal {F}}(f(t))}
などがある。あるいはもっと他の記号を使うことも在りうる。たとえば、(f (x ) と F (ξ) のように)もとの函数を表している文字の対応する大文字を用いてそのフーリエ変換を表すことは自然科学や工学においてとくによく用いられる記法である。
複素函数 ˆ f 極座標 に関してこれを表示することにより、振幅
A
(
ξ
)
=
|
f
^
(
ξ
)
|
,
{\displaystyle A(\xi )=|{\hat {f}}(\xi )|,}
および位相
φ
(
ξ
)
=
arg
(
f
^
(
ξ
)
)
{\displaystyle \varphi (\xi )=\arg({\hat {f}}(\xi ))}
と呼ばれるふたつの実函数 A (ξ) および φ(ξ) を用いて
f
^
(
ξ
)
=
A
(
ξ
)
e
i
φ
(
ξ
)
{\displaystyle {\hat {f}}(\xi )=A(\xi )e^{i\varphi (\xi )}}
なる形に解釈することができる。
このとき逆変換は ƒ (x ) の周波数成分 すべての再結合として
f
(
x
)
=
∫
−
∞
∞
A
(
ξ
)
e
i
(
2
π
ξ
x
+
φ
(
ξ
)
)
d
ν
{\displaystyle f(x)=\int _{-\infty }^{\infty }A(\xi )\,e^{i(2\pi \xi x+\varphi (\xi ))}\,d\nu }
と書くことができる。各成分は振幅 が A (ξ) で(x = 0 における)初期位相角 が φ(ξ) であるような e 2πix ξ のかたちの複素正弦曲線 である。
フーリエ変換は函数空間の間の写像として考えることもできる。この写像はここでは
F
{\displaystyle {\mathcal {F}}}
f のフーリエ変換には
F
(
f
)
{\displaystyle {\mathcal {F}}(f)}
F
{\displaystyle {\mathcal {F}}}
F
(
f
)
{\displaystyle {\mathcal {F}}(f)}
f )の線型変換を表す線型代数学の標準的な記法で
F
f
{\displaystyle {\mathcal {F}}f}
F
(
f
)
(
ξ
)
{\displaystyle {\mathcal {F}}(f)(\xi )}
(
F
f
)
(
ξ
)
{\displaystyle ({\mathcal {F}}f)(\xi )}
F
{\displaystyle {\mathcal {F}}}
f に施されて、その後に得られた函数の ξ における値が評価されるものと暗黙に理解されているということに注意しなければならない。
数学や多くの応用科学において、函数 f それ自身と函数 f の変数 x における値 f (x ) とを峻別しなければならないことがしばしばある。このことが意味するのは、たとえば
F
(
f
(
x
)
)
{\displaystyle {\mathcal {F}}(f(x))}
f の x における「値」のフーリエ変換と解釈できてしまうということである。このような不具合にもかかわらず、特定の函数あるいは特定の変数の函数を頻繁に変換しなければならないような場合には、このような記法はよく用いられる。たとえば
F
(
r
e
c
t
(
x
)
)
=
s
i
n
c
(
ξ
)
{\displaystyle {\mathcal {F}}(\mathrm {rect} (x))=\mathrm {sinc} (\xi )}
は矩形函数のフーリエ変換が sinc-函数であることを表すために用いられることがあり、またたとえば
F
(
f
(
x
+
x
0
)
)
=
F
(
f
(
x
)
)
e
2
π
i
ξ
x
0
{\displaystyle {\mathcal {F}}(f(x+x_{0}))={\mathcal {F}}(f(x))e^{2\pi i\xi x_{0}}}
はフーリエ変換のシフト性を表すのに用いられることがある。最後の例は、変換される函数 f をx 0 のではなく x の函数であるという前提のもとでのみ正しいということに注意を要する。
フーリエ変換の定義として慣習的によく用いられるものが3個ある。しばしば、フーリエ変換を毎秒ラジアンを単位とする角周波数 ω = 2πξ を用いて表す。ξ = ω/(2π) と置き換えれば、上述の定義式はこの規約の下
f
^
(
ω
)
=
∫
R
n
f
(
x
)
e
−
i
ω
⋅
x
d
x
{\displaystyle {\hat {f}}(\omega )=\int _{\mathbb {R} ^{n}}f(x)e^{-i\omega \cdot x}\,dx}
と書くことができ、また同じくこの規約の下で逆変換は
f
(
x
)
=
1
(
2
π
)
n
∫
R
n
f
^
(
ω
)
e
i
ω
⋅
x
d
ω
{\displaystyle f(x)={\frac {1}{(2\pi )^{n}}}\int _{\mathbb {R} ^{n}}{\hat {f}}(\omega )e^{i\omega \cdot x}\,d\omega }
となる。本項における定義とは異なり、この規約によって定義されるフーリエ変換はもはや L 2 (R n ユニタリ ではなく、フーリエ変換と逆変換との間の対称性も失われている。
他によく用いられる流儀は (2π)n
f
^
(
ω
)
=
1
(
2
π
)
n
/
2
∫
R
n
f
(
x
)
e
−
i
ω
⋅
x
d
x
,
{\displaystyle {\hat {f}}(\omega )={\frac {1}{(2\pi )^{n/2}}}\int _{\mathbb {R} ^{n}}f(x)e^{-i\omega \cdot x}\,dx,}
f
(
x
)
=
1
(
2
π
)
n
/
2
∫
R
n
f
^
(
ω
)
e
i
ω
⋅
x
d
ω
{\displaystyle f(x)={\frac {1}{(2\pi )^{n/2}}}\int _{\mathbb {R} ^{n}}{\hat {f}}(\omega )e^{i\omega \cdot x}\,d\omega }
という定義が導かれる。この規約のもとでは、フーリエ変換はふたたび L 2 (R n ユニタリ変換 となり、また フーリエ変換と逆変換の間の対称性も回復することができる。
これら三種類の定義はどれも、順変換逆変換ともに複素指数函数的な積分核 を結びつけることによって形成されている。順変換と逆変換で肩に付く符合は反対でなければならないが、どちらがどちらの符号を持つべきであるかという選択は、やはり定義の仕方によるということになる。
以下にフーリエ変換の閉じた表示に関する表を掲げる(フーリエ変換はよく用いられる三種類を挙げてある)。函数 ƒ (x ) , g (x ), h (x ) に対して、それらのフーリエ変換をそれぞれ ˆ f ˆ g ˆ h
以下の表におけるフーリエ変換は (Erdélyi 1954 ) あるいは (Kammler 2000 ) の付録に見つけることができる。
もとの函数
ユニタリ・周波に関するフーリエ変換
ユニタリ・角周波に関するフーリエ変換
非ユニタリ・角周波に関するフーリエ変換
備考
f
(
x
)
{\displaystyle f(x)\,}
f
^
(
ξ
)
=
{\displaystyle {\hat {f}}(\xi )=}
∫
−
∞
∞
f
(
x
)
e
−
2
π
i
x
ξ
d
x
{\displaystyle \int \limits _{-\infty }^{\infty }f(x)e^{-2\pi ix\xi }dx}
f
^
(
ω
)
=
{\displaystyle {\hat {f}}(\omega )=}
1
2
π
∫
−
∞
∞
f
(
x
)
e
−
i
ω
x
d
x
{\displaystyle {\frac {1}{\sqrt {2\pi }}}\int \limits _{-\infty }^{\infty }f(x)e^{-i\omega x}dx}
f
^
(
ν
)
=
{\displaystyle {\hat {f}}(\nu )=}
∫
−
∞
∞
f
(
x
)
e
−
i
ν
x
d
x
{\displaystyle \int \limits _{-\infty }^{\infty }f(x)e^{-i\nu x}dx}
101
a
f
(
x
)
+
b
g
(
x
)
{\displaystyle af(x)+bg(x)\,}
a
f
^
(
ξ
)
+
b
g
^
(
ξ
)
{\displaystyle a{\hat {f}}(\xi )+b{\hat {g}}(\xi )\,}
a
f
^
(
ω
)
+
b
g
^
(
ω
)
{\displaystyle a{\hat {f}}(\omega )+b{\hat {g}}(\omega )\,}
a
f
^
(
ν
)
+
b
g
^
(
ν
)
{\displaystyle a{\hat {f}}(\nu )+b{\hat {g}}(\nu )\,}
線型性
102
f
(
x
−
a
)
{\displaystyle f(x-a)\,}
e
−
2
π
i
a
ξ
f
^
(
ξ
)
{\displaystyle e^{-2\pi ia\xi }{\hat {f}}(\xi )\,}
e
−
i
a
ω
f
^
(
ω
)
{\displaystyle e^{-ia\omega }{\hat {f}}(\omega )\,}
e
−
i
a
ν
f
^
(
ν
)
{\displaystyle e^{-ia\nu }{\hat {f}}(\nu )\,}
時間領域シフト
103
e
2
π
i
a
x
f
(
x
)
{\displaystyle e^{2\pi iax}f(x)\,}
f
^
(
ξ
−
a
)
{\displaystyle {\hat {f}}\left(\xi -a\right)\,}
f
^
(
ω
−
2
π
a
)
{\displaystyle {\hat {f}}(\omega -2\pi a)\,}
f
^
(
ν
−
2
π
a
)
{\displaystyle {\hat {f}}(\nu -2\pi a)\,}
周波数領域シフト双対
104
f
(
a
x
)
{\displaystyle f(ax)\,}
1
|
a
|
f
^
(
ξ
a
)
{\displaystyle {\frac {1}{|a|}}{\hat {f}}\left({\frac {\xi }{a}}\right)\,}
1
|
a
|
f
^
(
ω
a
)
{\displaystyle {\frac {1}{|a|}}{\hat {f}}\left({\frac {\omega }{a}}\right)\,}
1
|
a
|
f
^
(
ν
a
)
{\displaystyle {\frac {1}{|a|}}{\hat {f}}\left({\frac {\nu }{a}}\right)\,}
|a | が大きければ f (ax ) は 0 の周りに集中し
1
|
a
|
f
^
(
ω
a
)
{\displaystyle {\frac {1}{|a|}}{\hat {f}}\left({\frac {\omega }{a}}\right)\,}
105
f
^
(
x
)
{\displaystyle {\hat {f}}(x)\,}
f
(
−
ξ
)
{\displaystyle f(-\xi )\,}
f
(
−
ω
)
{\displaystyle f(-\omega )\,}
2
π
f
(
−
ν
)
{\displaystyle 2\pi f(-\nu )\,}
ここで、
f
^
{\displaystyle {\hat {f}}}
x に取替えたものである。
106
d
n
f
(
x
)
d
x
n
{\displaystyle {\frac {d^{n}f(x)}{dx^{n}}}\,}
(
2
π
i
ξ
)
n
f
^
(
ξ
)
{\displaystyle (2\pi i\xi )^{n}{\hat {f}}(\xi )\,}
(
i
ω
)
n
f
^
(
ω
)
{\displaystyle (i\omega )^{n}{\hat {f}}(\omega )\,}
(
i
ν
)
n
f
^
(
ν
)
{\displaystyle (i\nu )^{n}{\hat {f}}(\nu )\,}
107
x
n
f
(
x
)
{\displaystyle x^{n}f(x)\,}
(
i
2
π
)
n
d
n
f
^
(
ξ
)
d
ξ
n
{\displaystyle \left({\frac {i}{2\pi }}\right)^{n}{\frac {d^{n}{\hat {f}}(\xi )}{d\xi ^{n}}}\,}
i
n
d
n
f
^
(
ω
)
d
ω
n
{\displaystyle i^{n}{\frac {d^{n}{\hat {f}}(\omega )}{d\omega ^{n}}}}
i
n
d
n
f
^
(
ν
)
d
ν
n
{\displaystyle i^{n}{\frac {d^{n}{\hat {f}}(\nu )}{d\nu ^{n}}}}
106の双対
108
(
f
∗
g
)
(
x
)
{\displaystyle (f*g)(x)\,}
f
^
(
ξ
)
g
^
(
ξ
)
{\displaystyle {\hat {f}}(\xi ){\hat {g}}(\xi )\,}
2
π
f
^
(
ω
)
g
^
(
ω
)
{\displaystyle {\sqrt {2\pi }}{\hat {f}}(\omega ){\hat {g}}(\omega )\,}
f
^
(
ν
)
g
^
(
ν
)
{\displaystyle {\hat {f}}(\nu ){\hat {g}}(\nu )\,}
f ∗ g は f と g との畳み込みである。この公式は畳み込み定理と呼ばれる。
109
f
(
x
)
g
(
x
)
{\displaystyle f(x)g(x)\,}
(
f
^
∗
g
^
)
(
ξ
)
{\displaystyle ({\hat {f}}*{\hat {g}})(\xi )\,}
(
f
^
∗
g
^
)
(
ω
)
2
π
{\displaystyle ({\hat {f}}*{\hat {g}})(\omega ) \over {\sqrt {2\pi }}\,}
1
2
π
(
f
^
∗
g
^
)
(
ν
)
{\displaystyle {\frac {1}{2\pi }}({\hat {f}}*{\hat {g}})(\nu )\,}
108の双対
110
純実偶関数
f
(
x
)
{\displaystyle f(x)}
f
^
(
ω
)
,
f
^
(
ξ
)
,
f
^
(
ν
)
{\displaystyle {\hat {f}}(\omega ),\,{\hat {f}}(\xi ),\,{\hat {f}}(\nu )\,}
偶関数
正弦・余弦変換 も参照
111
純実奇関数
f
(
x
)
{\displaystyle f(x)}
f
^
(
ω
)
,
f
^
(
ξ
)
,
f
^
(
ν
)
{\displaystyle {\hat {f}}(\omega ),\,{\hat {f}}(\xi ),\,{\hat {f}}(\nu )}
奇関数
以下の表におけるフーリエ変換は (Campbell & Foster 1948 ), (Erdélyi 1954 ) あるいは (Kammler 2000 ) の付録に見つけることができる。
もとの函数
ユニタリ・周波に関するフーリエ変換
ユニタリ・角周波に関するフーリエ変換
非ユニタリ・角周波に関するフーリエ変換
備考
f
(
x
)
{\displaystyle f(x)}
f
^
(
ξ
)
=
{\displaystyle {\hat {f}}(\xi )=}
∫
−
∞
∞
f
(
x
)
e
−
2
π
i
x
ξ
d
x
{\displaystyle \int _{-\infty }^{\infty }f(x)e^{-2\pi ix\xi }\,dx}
f
^
(
ω
)
=
{\displaystyle {\hat {f}}(\omega )=}
1
2
π
∫
−
∞
∞
f
(
x
)
e
−
i
ω
x
d
x
{\displaystyle {\frac {1}{\sqrt {2\pi }}}\int _{-\infty }^{\infty }f(x)e^{-i\omega x}\,dx}
f
^
(
ν
)
=
{\displaystyle {\hat {f}}(\nu )=}
∫
−
∞
∞
f
(
x
)
e
−
i
ν
x
d
x
{\displaystyle \int _{-\infty }^{\infty }f(x)e^{-i\nu x}\,dx}
201
rect
(
a
x
)
{\displaystyle \operatorname {rect} (ax)\,}
1
|
a
|
⋅
sinc
(
ξ
a
)
{\displaystyle {\frac {1}{|a|}}\cdot \operatorname {sinc} \left({\frac {\xi }{a}}\right)}
1
2
π
a
2
⋅
sinc
(
ω
2
π
a
)
{\displaystyle {\frac {1}{\sqrt {2\pi a^{2}}}}\cdot \operatorname {sinc} \left({\frac {\omega }{2\pi a}}\right)}
1
|
a
|
⋅
sinc
(
ν
2
π
a
)
{\displaystyle {\frac {1}{|a|}}\cdot \operatorname {sinc} \left({\frac {\nu }{2\pi a}}\right)}
矩形波 と標準化されたsinc関数 でsinc関数 はsinc(x ) = sin(πx )/(πx )で表される
202
sinc
(
a
x
)
{\displaystyle \operatorname {sinc} (ax)\,}
1
|
a
|
⋅
rect
(
ξ
a
)
{\displaystyle {\frac {1}{|a|}}\cdot \operatorname {rect} \left({\frac {\xi }{a}}\right)\,}
1
2
π
a
2
⋅
rect
(
ω
2
π
a
)
{\displaystyle {\frac {1}{\sqrt {2\pi a^{2}}}}\cdot \operatorname {rect} \left({\frac {\omega }{2\pi a}}\right)}
1
|
a
|
⋅
rect
(
ν
2
π
a
)
{\displaystyle {\frac {1}{|a|}}\cdot \operatorname {rect} \left({\frac {\nu }{2\pi a}}\right)}
201の双対 で矩形波は理想的なローパスフィルター である。sinc関数 はそのようなフィルターの非因果波応答である。
203
sinc
2
(
a
x
)
{\displaystyle \operatorname {sinc} ^{2}(ax)}
1
|
a
|
⋅
tri
(
ξ
a
)
{\displaystyle {\frac {1}{|a|}}\cdot \operatorname {tri} \left({\frac {\xi }{a}}\right)}
1
2
π
a
2
⋅
tri
(
ω
2
π
a
)
{\displaystyle {\frac {1}{\sqrt {2\pi a^{2}}}}\cdot \operatorname {tri} \left({\frac {\omega }{2\pi a}}\right)}
1
|
a
|
⋅
tri
(
ν
2
π
a
)
{\displaystyle {\frac {1}{|a|}}\cdot \operatorname {tri} \left({\frac {\nu }{2\pi a}}\right)}
tri(x )は三角形関数 である。
204
tri
(
a
x
)
{\displaystyle \operatorname {tri} (ax)}
1
|
a
|
⋅
sinc
2
(
ξ
a
)
{\displaystyle {\frac {1}{|a|}}\cdot \operatorname {sinc} ^{2}\left({\frac {\xi }{a}}\right)\,}
1
2
π
a
2
⋅
sinc
2
(
ω
2
π
a
)
{\displaystyle {\frac {1}{\sqrt {2\pi a^{2}}}}\cdot \operatorname {sinc} ^{2}\left({\frac {\omega }{2\pi a}}\right)}
1
|
a
|
⋅
sinc
2
(
ν
2
π
a
)
{\displaystyle {\frac {1}{|a|}}\cdot \operatorname {sinc} ^{2}\left({\frac {\nu }{2\pi a}}\right)}
203の双対
205
e
−
a
x
u
(
x
)
{\displaystyle e^{-ax}u(x)\,}
1
a
+
2
π
i
ξ
{\displaystyle {\frac {1}{a+2\pi i\xi }}}
1
2
π
(
a
+
i
ω
)
{\displaystyle {\frac {1}{{\sqrt {2\pi }}(a+i\omega )}}}
1
a
+
i
ν
{\displaystyle {\frac {1}{a+i\nu }}}
u (x )はヘビサイドの単位ステップ関数であり、a >0
206
e
−
α
x
2
{\displaystyle e^{-\alpha x^{2}}\,}
π
α
⋅
e
−
(
π
ξ
)
2
α
{\displaystyle {\sqrt {\frac {\pi }{\alpha }}}\cdot e^{-{\frac {(\pi \xi )^{2}}{\alpha }}}}
1
2
α
⋅
e
−
ω
2
4
α
{\displaystyle {\frac {1}{\sqrt {2\alpha }}}\cdot e^{-{\frac {\omega ^{2}}{4\alpha }}}}
π
α
⋅
e
−
ν
2
4
α
{\displaystyle {\sqrt {\frac {\pi }{\alpha }}}\cdot e^{-{\frac {\nu ^{2}}{4\alpha }}}}
これが示すものは、ガウス関数exp(−αx 2 )でα を選んだ場合はユニタリフーリエ変換である。 Re(α )>0で積分可能である
207
e
−
a
|
x
|
{\displaystyle \operatorname {e} ^{-a|x|}\,}
2
a
a
2
+
4
π
2
ξ
2
{\displaystyle {\frac {2a}{a^{2}+4\pi ^{2}\xi ^{2}}}}
2
π
⋅
a
a
2
+
ω
2
{\displaystyle {\sqrt {\frac {2}{\pi }}}\cdot {\frac {a}{a^{2}+\omega ^{2}}}}
2
a
a
2
+
ν
2
{\displaystyle {\frac {2a}{a^{2}+\nu ^{2}}}}
a>0 である
208
J
n
(
x
)
x
{\displaystyle {\frac {J_{n}(x)}{x}}\,}
2
i
n
(
−
i
)
n
⋅
U
n
−
1
(
2
π
ξ
)
{\displaystyle {\frac {2i}{n}}(-i)^{n}\cdot U_{n-1}(2\pi \xi )\,}
⋅
1
−
4
π
2
ξ
2
rect
(
π
ξ
)
{\displaystyle \cdot \ {\sqrt {1-4\pi ^{2}\xi ^{2}}}\operatorname {rect} (\pi \xi )}
2
π
i
n
(
−
i
)
n
⋅
U
n
−
1
(
ω
)
{\displaystyle {\sqrt {\frac {2}{\pi }}}{\frac {i}{n}}(-i)^{n}\cdot U_{n-1}(\omega )\,}
⋅
1
−
ω
2
rect
(
ω
2
)
{\displaystyle \cdot \ {\sqrt {1-\omega ^{2}}}\operatorname {rect} \left({\frac {\omega }{2}}\right)}
2
i
n
(
−
i
)
n
⋅
U
n
−
1
(
ν
)
{\displaystyle {\frac {2i}{n}}(-i)^{n}\cdot U_{n-1}(\nu )\,}
⋅
1
−
ν
2
rect
(
ν
2
)
{\displaystyle \cdot \ {\sqrt {1-\nu ^{2}}}\operatorname {rect} \left({\frac {\nu }{2}}\right)}
関数Jn (x )は、n 次の第1種ベッセル関数である。関数Un (x )は第2種チェビシェフ多項式である。下記315と316を参照
209
sech
(
a
x
)
{\displaystyle \operatorname {sech} (ax)\,}
π
a
sech
(
π
2
a
ξ
)
{\displaystyle {\frac {\pi }{a}}\operatorname {sech} \left({\frac {\pi ^{2}}{a}}\xi \right)}
1
a
π
2
sech
(
π
2
a
ω
)
{\displaystyle {\frac {1}{a}}{\sqrt {\frac {\pi }{2}}}\operatorname {sech} \left({\frac {\pi }{2a}}\omega \right)}
π
a
sech
(
π
2
a
ν
)
{\displaystyle {\frac {\pi }{a}}\operatorname {sech} \left({\frac {\pi }{2a}}\nu \right)}
双曲線正割は自分自身をフーリエ変換したものである
以下の表におけるフーリエ変換は (Erdélyi 1954 ) あるいは (Kammler 2000 ) の付録に見つけることができる。
もとの函数
ユニタリ・周波に関するフーリエ変換
ユニタリ・角周波に関するフーリエ変換
非ユニタリ・角周波に関するフーリエ変換
備考
f
(
x
)
{\displaystyle f(x)\,}
f
^
(
ξ
)
=
{\displaystyle {\hat {f}}(\xi )=}
∫
−
∞
∞
f
(
x
)
e
−
2
π
i
x
ξ
d
x
{\displaystyle \int _{-\infty }^{\infty }f(x)e^{-2\pi ix\xi }\,dx}
f
^
(
ω
)
=
{\displaystyle {\hat {f}}(\omega )=}
1
2
π
∫
−
∞
∞
f
(
x
)
e
−
i
ω
x
d
x
{\displaystyle {\frac {1}{\sqrt {2\pi }}}\int _{-\infty }^{\infty }f(x)e^{-i\omega x}\,dx}
f
^
(
ν
)
=
{\displaystyle {\hat {f}}(\nu )=}
∫
−
∞
∞
f
(
x
)
e
−
i
ν
x
d
x
{\displaystyle \int _{-\infty }^{\infty }f(x)e^{-i\nu x}\,dx}
301
1
{\displaystyle 1}
δ
(
ξ
)
{\displaystyle \delta (\xi )\,}
2
π
⋅
δ
(
ω
)
{\displaystyle {\sqrt {2\pi }}\cdot \delta (\omega )}
2
π
δ
(
ν
)
{\displaystyle 2\pi \delta (\nu )\,}
δ(ξ) はディラックのデルタ関数
302
δ
(
x
)
{\displaystyle \delta (x)\,}
1
{\displaystyle 1}
1
2
π
{\displaystyle {\frac {1}{\sqrt {2\pi }}}\,}
1
{\displaystyle 1}
301の双対
303
e
i
a
x
{\displaystyle e^{iax}\,}
δ
(
ξ
−
a
2
π
)
{\displaystyle \delta \left(\xi -{\frac {a}{2\pi }}\right)}
2
π
⋅
δ
(
ω
−
a
)
{\displaystyle {\sqrt {2\pi }}\cdot \delta (\omega -a)}
2
π
δ
(
ν
−
a
)
{\displaystyle 2\pi \delta (\nu -a)\,}
103と301より導かれる。
304
cos
(
a
x
)
{\displaystyle \cos(ax)\,}
δ
(
ξ
−
a
2
π
)
+
δ
(
ξ
+
a
2
π
)
2
{\displaystyle {\frac {\displaystyle \delta \left(\xi -{\frac {a}{2\pi }}\right)+\delta \left(\xi +{\frac {a}{2\pi }}\right)}{2}}}
2
π
⋅
δ
(
ω
−
a
)
+
δ
(
ω
+
a
)
2
{\displaystyle {\sqrt {2\pi }}\cdot {\frac {\delta (\omega -a)+\delta (\omega +a)}{2}}\,}
π
(
δ
(
ν
−
a
)
+
δ
(
ν
+
a
)
)
{\displaystyle \pi \left(\delta (\nu -a)+\delta (\nu +a)\right)}
101、303とオイラーの公式 :
cos
(
a
x
)
=
(
e
i
a
x
+
e
−
i
a
x
)
/
2.
{\displaystyle \displaystyle \cos(ax)=(e^{iax}+e^{-iax})/2.}
305
sin
(
a
x
)
{\displaystyle \sin(ax)\,}
i
⋅
δ
(
ξ
+
a
2
π
)
−
δ
(
ξ
−
a
2
π
)
2
{\displaystyle i\cdot {\frac {\displaystyle \delta \left(\xi +{\frac {a}{2\pi }}\right)-\delta \left(\xi -{\frac {a}{2\pi }}\right)}{2}}}
i
2
π
⋅
δ
(
ω
+
a
)
−
δ
(
ω
−
a
)
2
{\displaystyle i{\sqrt {2\pi }}\cdot {\frac {\delta (\omega +a)-\delta (\omega -a)}{2}}}
i
π
(
δ
(
ν
+
a
)
−
δ
(
ν
−
a
)
)
{\displaystyle i\pi \left(\delta (\nu +a)-\delta (\nu -a)\right)}
101、303と
sin
(
a
x
)
=
(
e
i
a
x
−
e
−
i
a
x
)
/
(
2
i
)
.
{\displaystyle \displaystyle \sin(ax)=(e^{iax}-e^{-iax})/(2i).}
306
cos
(
a
x
2
)
{\displaystyle \cos(ax^{2})\,}
π
a
cos
(
π
2
ξ
2
a
−
π
4
)
{\displaystyle {\sqrt {\frac {\pi }{a}}}\cos \left({\frac {\pi ^{2}\xi ^{2}}{a}}-{\frac {\pi }{4}}\right)}
1
2
a
cos
(
ω
2
4
a
−
π
4
)
{\displaystyle {\frac {1}{\sqrt {2a}}}\cos \left({\frac {\omega ^{2}}{4a}}-{\frac {\pi }{4}}\right)}
π
a
cos
(
ν
2
4
a
−
π
4
)
{\displaystyle {\sqrt {\frac {\pi }{a}}}\cos \left({\frac {\nu ^{2}}{4a}}-{\frac {\pi }{4}}\right)}
307
sin
(
a
x
2
)
{\displaystyle \sin(ax^{2})\,}
−
π
a
sin
(
π
2
ξ
2
a
−
π
4
)
{\displaystyle -{\sqrt {\frac {\pi }{a}}}\sin \left({\frac {\pi ^{2}\xi ^{2}}{a}}-{\frac {\pi }{4}}\right)}
−
1
2
a
sin
(
ω
2
4
a
−
π
4
)
{\displaystyle {\frac {-1}{\sqrt {2a}}}\sin \left({\frac {\omega ^{2}}{4a}}-{\frac {\pi }{4}}\right)}
−
π
a
sin
(
ν
2
4
a
−
π
4
)
{\displaystyle -{\sqrt {\frac {\pi }{a}}}\sin \left({\frac {\nu ^{2}}{4a}}-{\frac {\pi }{4}}\right)}
308
x
n
{\displaystyle x^{n}\,}
(
i
2
π
)
n
δ
(
n
)
(
ξ
)
{\displaystyle \left({\frac {i}{2\pi }}\right)^{n}\delta ^{(n)}(\xi )\,}
i
n
2
π
δ
(
n
)
(
ω
)
{\displaystyle i^{n}{\sqrt {2\pi }}\delta ^{(n)}(\omega )\,}
2
π
i
n
δ
(
n
)
(
ν
)
{\displaystyle 2\pi i^{n}\delta ^{(n)}(\nu )\,}
n は自然数 、 δ(n ) (ξ) はディラックのデルタ関数のn 階微分。107と301より導かれる。さらに101と組み合わせることで、任意の多項式 を変換できる。
309
1
x
{\displaystyle {\frac {1}{x}}\,}
−
i
π
sgn
(
ξ
)
{\displaystyle -i\pi \operatorname {sgn}(\xi )\,}
−
i
π
2
sgn
(
ω
)
{\displaystyle -i{\sqrt {\frac {\pi }{2}}}\operatorname {sgn}(\omega )}
−
i
π
sgn
(
ν
)
{\displaystyle -i\pi \operatorname {sgn}(\nu )\,}
sgn(ξ) は符号関数 。1/x は超関数ではないことに注意。シュワルツ関数に対してテストするときにコーシーの主値 を使用する必要がある。この規則はヒルベルト変換 を研究するとき有用である。
310
1
x
n
{\displaystyle {\frac {1}{x^{n}}}}
−
i
π
(
−
2
π
i
ξ
)
n
−
1
(
n
−
1
)
!
sgn
(
ξ
)
{\displaystyle -i\pi {\frac {(-2\pi i\xi )^{n-1}}{(n-1)!}}\operatorname {sgn}(\xi )}
−
i
π
2
⋅
(
−
i
ω
)
n
−
1
(
n
−
1
)
!
sgn
(
ω
)
{\displaystyle -i{\sqrt {\frac {\pi }{2}}}\cdot {\frac {(-i\omega )^{n-1}}{(n-1)!}}\operatorname {sgn}(\omega )}
−
i
π
(
−
i
ν
)
n
−
1
(
n
−
1
)
!
sgn
(
ν
)
{\displaystyle -i\pi {\frac {(-i\nu )^{n-1}}{(n-1)!}}\operatorname {sgn}(\nu )}
309の一般化
311
1
|
x
|
{\displaystyle {\frac {1}{\sqrt {|x|}}}\,}
1
|
ξ
|
{\displaystyle {\frac {1}{\sqrt {|\xi |}}}}
1
|
ω
|
{\displaystyle {\frac {1}{\sqrt {|\omega |}}}}
2
π
|
ν
|
{\displaystyle {\frac {\sqrt {2\pi }}{\sqrt {|\nu |}}}}
312
sgn
(
x
)
{\displaystyle \operatorname {sgn}(x)\,}
1
i
π
ξ
{\displaystyle {\frac {1}{i\pi \xi }}}
2
π
⋅
1
i
ω
{\displaystyle {\sqrt {\frac {2}{\pi }}}\cdot {\frac {1}{i\omega }}\,}
2
i
ν
{\displaystyle {\frac {2}{i\nu }}}
309の双対。積分はコーシーの主値 を考える。
313
u
(
x
)
{\displaystyle u(x)\,}
1
2
(
1
i
π
ξ
+
δ
(
ξ
)
)
{\displaystyle {\frac {1}{2}}\left({\frac {1}{i\pi \xi }}+\delta (\xi )\right)}
π
2
(
1
i
π
ω
+
δ
(
ω
)
)
{\displaystyle {\sqrt {\frac {\pi }{2}}}\left({\frac {1}{i\pi \omega }}+\delta (\omega )\right)}
π
(
1
i
π
ν
+
δ
(
ν
)
)
{\displaystyle \pi \left({\frac {1}{i\pi \nu }}+\delta (\nu )\right)}
u (x ) はヘヴィサイドの階段関数 。101、301および312より導かれる。
314
∑
n
=
−
∞
∞
δ
(
x
−
n
T
)
{\displaystyle \sum _{n=-\infty }^{\infty }\delta (x-nT)}
1
T
∑
k
=
−
∞
∞
δ
(
ξ
−
k
T
)
{\displaystyle {\frac {1}{T}}\sum _{k=-\infty }^{\infty }\delta \left(\xi -{\frac {k}{T}}\right)}
2
π
T
∑
k
=
−
∞
∞
δ
(
ω
−
2
π
k
T
)
{\displaystyle {\frac {\sqrt {2\pi }}{T}}\sum _{k=-\infty }^{\infty }\delta \left(\omega -{\frac {2\pi k}{T}}\right)}
2
π
T
∑
k
=
−
∞
∞
δ
(
ν
−
2
π
k
T
)
{\displaystyle {\frac {2\pi }{T}}\sum _{k=-\infty }^{\infty }\delta \left(\nu -{\frac {2\pi k}{T}}\right)}
この関数はくし型関数 といわれる。302、102および、超関数として
∑
n
=
−
∞
∞
e
i
n
x
=
∑
k
=
−
∞
∞
δ
(
x
+
2
π
k
)
{\displaystyle \sum _{n=-\infty }^{\infty }e^{inx}=\sum _{k=-\infty }^{\infty }\delta (x+2\pi k)}
315
J
0
(
x
)
{\displaystyle J_{0}(x)\,}
2
rect
(
π
ξ
)
1
−
4
π
2
ξ
2
{\displaystyle {\frac {2\,\operatorname {rect} (\pi \xi )}{\sqrt {1-4\pi ^{2}\xi ^{2}}}}}
2
π
⋅
rect
(
ω
2
)
1
−
ω
2
{\displaystyle {\sqrt {\frac {2}{\pi }}}\cdot {\frac {\operatorname {rect} \left(\displaystyle {\frac {\omega }{2}}\right)}{\sqrt {1-\omega ^{2}}}}}
2
rect
(
ν
2
)
1
−
ν
2
{\displaystyle {\frac {2\,\operatorname {rect} \left(\displaystyle {\frac {\nu }{2}}\right)}{\sqrt {1-\nu ^{2}}}}}
J 0 (x ) は0次の第1種ベッセル関数
316
J
n
(
x
)
{\displaystyle J_{n}(x)\,}
2
(
−
i
)
n
T
n
(
2
π
ξ
)
rect
(
π
ξ
)
1
−
4
π
2
ξ
2
{\displaystyle {\frac {2(-i)^{n}T_{n}(2\pi \xi )\operatorname {rect} (\pi \xi )}{\sqrt {1-4\pi ^{2}\xi ^{2}}}}}
2
π
(
−
i
)
n
T
n
(
ω
)
rect
(
ω
2
)
1
−
ω
2
{\displaystyle {\sqrt {\frac {2}{\pi }}}{\frac {(-i)^{n}T_{n}(\omega )\operatorname {rect} \left(\displaystyle {\frac {\omega }{2}}\right)}{\sqrt {1-\omega ^{2}}}}}
2
(
−
i
)
n
T
n
(
ν
)
rect
(
ν
2
)
1
−
ν
2
{\displaystyle {\frac {2(-i)^{n}T_{n}(\nu )\operatorname {rect} \left(\displaystyle {\frac {\nu }{2}}\right)}{\sqrt {1-\nu ^{2}}}}}
315の一般化。Jn (x ) はn 次の第1種ベッセル関数 、Tn (x ) は第1種チェビシェフ多項式 。
もとの函数
ユニタリ・周波に関するフーリエ変換
ユニタリ・角周波に関するフーリエ変換
非ユニタリ・角周波に関するフーリエ変換
備考
f
(
x
,
y
)
{\displaystyle f(x,y)}
f
^
(
ξ
x
,
ξ
y
)
=
{\displaystyle {\hat {f}}(\xi _{x},\xi _{y})=}
∬
f
(
x
,
y
)
e
−
2
π
i
(
ξ
x
x
+
ξ
y
y
)
d
x
d
y
{\displaystyle \iint f(x,y)e^{-2\pi i(\xi _{x}x+\xi _{y}y)}\,dxdy}
f
^
(
ω
x
,
ω
y
)
=
{\displaystyle {\hat {f}}(\omega _{x},\omega _{y})=}
1
2
π
∬
f
(
x
,
y
)
e
−
i
(
ω
x
x
+
ω
y
y
)
d
x
d
y
{\displaystyle {\frac {1}{2\pi }}\iint f(x,y)e^{-i(\omega _{x}x+\omega _{y}y)}\,dxdy}
f
^
(
ν
x
,
ν
y
)
=
{\displaystyle {\hat {f}}(\nu _{x},\nu _{y})=}
∬
f
(
x
,
y
)
e
−
i
(
ν
x
x
+
ν
y
y
)
d
x
d
y
{\displaystyle \iint f(x,y)e^{-i(\nu _{x}x+\nu _{y}y)}\,dxdy}
ξx y x y x y
401
e
−
π
(
a
2
x
2
+
b
2
y
2
)
{\displaystyle e^{-\pi \left(a^{2}x^{2}+b^{2}y^{2}\right)}}
1
|
a
b
|
e
−
π
(
ξ
x
2
/
a
2
+
ξ
y
2
/
b
2
)
{\displaystyle {\frac {1}{|ab|}}e^{-\pi \left(\xi _{x}^{2}/a^{2}+\xi _{y}^{2}/b^{2}\right)}}
1
2
π
⋅
|
a
b
|
e
−
(
ω
x
2
/
a
2
+
ω
y
2
/
b
2
)
4
π
{\displaystyle {\frac {1}{2\pi \cdot |ab|}}e^{\frac {-\left(\omega _{x}^{2}/a^{2}+\omega _{y}^{2}/b^{2}\right)}{4\pi }}}
1
|
a
b
|
e
−
(
ν
x
2
/
a
2
+
ν
y
2
/
b
2
)
4
π
{\displaystyle {\frac {1}{|ab|}}e^{\frac {-\left(\nu _{x}^{2}/a^{2}+\nu _{y}^{2}/b^{2}\right)}{4\pi }}}
両方のガウス関数は規格化されている必要はない。
402
c
i
r
c
(
x
2
+
y
2
)
{\displaystyle \mathrm {circ} ({\sqrt {x^{2}+y^{2}}})}
J
1
(
2
π
ξ
x
2
+
ξ
y
2
)
ξ
x
2
+
ξ
y
2
{\displaystyle {\frac {J_{1}\left(2\pi {\sqrt {\xi _{x}^{2}+\xi _{y}^{2}}}\right)}{\sqrt {\xi _{x}^{2}+\xi _{y}^{2}}}}}
J
1
(
ω
x
2
+
ω
y
2
)
ω
x
2
+
ω
y
2
{\displaystyle {\frac {J_{1}\left({\sqrt {\omega _{x}^{2}+\omega _{y}^{2}}}\right)}{\sqrt {\omega _{x}^{2}+\omega _{y}^{2}}}}}
2
π
J
1
(
ν
x
2
+
ν
y
2
)
ν
x
2
+
ν
y
2
{\displaystyle {\frac {2\pi J_{1}\left({\sqrt {\nu _{x}^{2}+\nu _{y}^{2}}}\right)}{\sqrt {\nu _{x}^{2}+\nu _{y}^{2}}}}}
元の函数は circ(r ) = 1 (0≤r ≤1), and 0 (otherwise) で定義される。これはエアリー分布であり、1次の第1種ベッセル函数 J 1 で表される。
もとの函数
ユニタリ・周波に関するフーリエ変換
ユニタリ・角周波に関するフーリエ変換
非ユニタリ・角周波に関するフーリエ変換
備考
f
(
x
)
{\displaystyle f(x)\,}
f
^
(
ξ
)
=
{\displaystyle {\hat {f}}(\xi )=}
∫
R
n
f
(
x
)
e
−
2
π
i
x
⋅
ξ
d
x
{\displaystyle \int _{\mathbb {R} ^{n}}f(x)e^{-2\pi ix\cdot \xi }\,dx}
f
^
(
ω
)
=
{\displaystyle {\hat {f}}(\omega )=}
1
(
2
π
)
(
n
/
2
)
∫
R
n
f
(
x
)
e
−
i
ω
⋅
x
d
x
{\displaystyle {\frac {1}{{(2\pi )}^{(n/2)}}}\int _{\mathbb {R} ^{n}}f(x)e^{-i\omega \cdot x}\,dx}
f
^
(
ν
)
=
{\displaystyle {\hat {f}}(\nu )=}
∫
R
n
f
(
x
)
e
−
i
x
⋅
ν
d
x
{\displaystyle \int _{\mathbb {R} ^{n}}f(x)e^{-ix\cdot \nu }\,dx}
501
χ
[
0
,
1
]
(
|
x
|
)
(
1
−
|
x
|
2
)
δ
{\displaystyle \chi _{[0,1]}(|x|)(1-|x|^{2})^{\delta }\,}
π
−
δ
Γ
(
δ
+
1
)
|
ξ
|
−
(
n
/
2
)
−
δ
{\displaystyle \pi ^{-\delta }\Gamma (\delta +1)|\xi |^{-(n/2)-\delta }\,}
⋅
J
n
/
2
+
δ
(
2
π
|
ξ
|
)
{\displaystyle \cdot J_{n/2+\delta }(2\pi |\xi |)}
2
−
δ
Γ
(
δ
+
1
)
|
ω
|
−
(
n
/
2
)
−
δ
{\displaystyle 2^{-\delta }\Gamma (\delta +1)\left|\omega \right|^{-(n/2)-\delta }}
⋅
J
n
/
2
+
δ
(
|
ω
|
)
{\displaystyle \cdot J_{n/2+\delta }(|\omega |)}
π
−
δ
Γ
(
δ
+
1
)
|
ν
2
π
|
−
(
n
/
2
)
−
δ
{\displaystyle \pi ^{-\delta }\Gamma (\delta +1)\left|{\frac {\nu }{2\pi }}\right|^{-(n/2)-\delta }}
⋅
J
n
/
2
+
δ
(
|
ν
|
)
{\displaystyle \cdot J_{n/2+\delta }(|\nu |)}
χ[0,1] は区間 [0, 1] の指示関数 、Γ(x ) はガンマ関数、J n /2+δn /2 + δ次の第1種ベッセル関数である。n = 2 およびδ = 0とすると402を得る。
Bochner, S. ; Chandrasekharan, K. (1949). Fourier Transforms . Princeton University Press Bracewell, R. N. (2000), The Fourier Transform and Its Applications (3rd ed.), Boston: McGraw-Hill Campbell, George; Foster, Ronald (1948), Fourier Integrals for Practical Applications , New York: D. Van Nostrand Company, Inc. Duoandikoetxea, Javier (2001), Fourier Analysis , American Mathematical Society , ISBN 0-8218-2172-5 Dym, H ; McKean, H (1985), Fourier Series and Integrals , Academic Press, ISBN 978-0122264511 Erdélyi, Arthur, ed. (1954), Tables of Integral Transforms , 1 , New Your: McGraw-Hill Grafakos, Loukas (2004), Classical and Modern Fourier Analysis , Prentice-Hall, ISBN 0-13-035399-X Hörmander, L. (1976), Linear Partial Differential Operators, Volume 1 , Springer-Verlag , ISBN 978-3540006626 James, J.F. (2002), A Student's Guide to Fourier Transforms (2nd ed.), New York: Cambridge University Press, ISBN 0-521-00428-4 Kaiser, Gerald (1994), A Friendly Guide to Wavelets , Birkhäuser, ISBN 0-8176-3711-7 Kammler, David (2000), A First Course in Fourier Analysis , Prentice Hall, ISBN 0-13-578782-3 Katznelson, Yitzhak (1976), An introduction to Harmonic Analysis , Dover, ISBN 0-486-63331-4 Bao Luong(2009): Fourier Analysis on Finite Abelian Groups , Birkhäuser, ISBN 978-0-8176-4916-6 . ※ 有限アーベル群上のフーリエ解析
Pinsky, Mark (2002), Introduction to Fourier Analysis and Wavelets , Brooks/Cole, ISBN 0-534-37660-6 Polyanin, A. D.; Manzhirov, A. V. (1998), Handbook of Integral Equations , Boca Raton: CRC Press, ISBN 0-8493-2876-4 Dinakar Ramakrishnan,and Robert J. Valenza (1999): Fourier Analysis on Number Fields , Springer (GMT 186),ISBN 978-1-4757-3085-2 . ※ 数論関連
Rudin, Walter (1987), Real and Complex Analysis (Third ed.), Singapore: McGraw-Hill, ISBN 0-07-100276-6 Stein, Elias; Shakarchi, Rami (2003), Fourier Analysis: An introduction , Princeton University Press, ISBN 0-691-11384-X Stein, Elias; Weiss, Guido (1971), Introduction to Fourier Analysis on Euclidean Spaces , Princeton, N.J.: Princeton University Press, ISBN 978-0-691-08078-9 Audrey Terras (1999): Fourier Analysis on Finite Groups and Applications , Cambridge University Press, ISBN 978-0-52145718-7 . ※ 有限群上のフーリエ解析
Wilson, R. G. (1995), Fourier Series and Optical Transform Techniques in Contemporary Optics , New York: Wiley, ISBN 0471303577 Yosida, K. (1968), Functional Analysis , Springer-Verlag, ISBN 3-540-58654-7 分野 系特性 デジタル制御 先進技術 制御器 制御応用
カテゴリ








































 3ヘルツの振動を示すもとの関数
3ヘルツの振動を示すもとの関数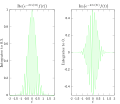 3ヘルツにおけるフーリエ変換の被積分関数の実部および虚部
3ヘルツにおけるフーリエ変換の被積分関数の実部および虚部 5ヘルツにおけるフーリエ変換の被積分関数の実部および虚部
5ヘルツにおけるフーリエ変換の被積分関数の実部および虚部 3ヘルツおよび5ヘルツでラベル付けされたフーリエ変換
3ヘルツおよび5ヘルツでラベル付けされたフーリエ変換





















![{\displaystyle {\Big [}\int _{-\infty }^{\infty }(x-x_{0})^{2}|f(x)|^{2}\,dx{\Big ]}{\Big [}\int _{-\infty }^{\infty }(\xi -\xi _{0})^{2}|{\hat {f}}(\xi )|^{2}\,d\xi {\Big ]}\geq {\frac {1}{16\pi ^{2}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/db1a84dc528743105ed6bf11c7eefa866cc8ca90)





![{\displaystyle {\psi }_{n}(x):={\frac {\sqrt[{4}]{2}}{\sqrt {n!}}}\,e^{-\pi x^{2}}H_{n}(2x{\sqrt {\pi }})}](https://wikimedia.org/api/rest_v1/media/math/render/svg/975630215aec815b4bbb071f40b7d399daa8cc6d)


















































































































































































































![{\displaystyle \chi _{[0,1]}(|x|)(1-|x|^{2})^{\delta }\,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/83eb3f1c5fead9a5562ae4e22590afb9140a51b2)





