
「きぼう」の版間の差分
Sutepen angel momo (会話 | 投稿記録) |
m →関連事項: 追加 |
||
| (28人の利用者による、間の55版が非表示) | |||
| 1行目: | 1行目: | ||
{{otheruseslist|[[国際宇宙ステーション]]の実験棟|列車の「きぼう」|修学旅行列車|[[小惑星]]|きぼう (小惑星)|その他の希望(きぼう)|希望 (曖昧さ回避)}} |
{{otheruseslist|[[国際宇宙ステーション]]の実験棟|列車の「きぼう」|修学旅行列車|[[小惑星]]|きぼう (小惑星)|その他の希望(きぼう)|希望 (曖昧さ回避)}} |
||
[[ファイル: |
[[ファイル:ISS-55 EVA-1 Kibo laboratory module.jpg|thumb|right|300px|きぼうの外観]] |
||
[[ファイル:Japanese Experiment Module Kibo.jpg|thumb|right|300px|きぼう |
[[ファイル:Japanese Experiment Module Kibo.jpg|thumb|right|300px|NASDA時代のきぼう完成予想図]][[ファイル:きぼう Kibō.png|thumb|right|300px|きぼうの全体図]] |
||
[[ |
[[File:Kibou logo.svg|thumb|きぼうのロゴ]] |
||
'''きぼう'''は[[宇宙航空研究開発機構]] (JAXA) が開発した[[日本]]の宇宙実験棟で、[[国際宇宙ステーション]] (ISS) |
'''きぼう'''('''KIBO''')は、[[宇宙航空研究開発機構]] (JAXA) が開発した[[日本]]の宇宙実験棟で、[[国際宇宙ステーション]] (ISS) を構成する部位の1つ<ref name="kibo iss gaiyou"/>。ISSでは最大の実験棟で<ref name="kibo iss gaiyou"/>、通称は'''「きぼう」日本実験棟'''<ref name="kibo handbook 1.3"/>。計画時の呼称は'''JEM'''(Japanese Experiment Module:日本実験棟)<ref>{{Cite web|和書|url=https://www.mext.go.jp/a_menu/kaihatu/space/kaihatsushi/detail/1299941.htm|title=(4)日本の実験棟 「きぼう」(JEM)|publisher=[[文部科学省]]|date=2011-02|accessdate=2019-01-19}}</ref>。日本で初めての軌道上研究所と位置付けられている<ref name="monbu nippon space history 5-1"/>。[[エアロック]]やロボットアームを備え<ref name="kibo iss gaiyou"/>、ISSでは唯一、重量50キログラム程度までの超小型[[人工衛星]]を軌道投入できる機能を有し、JAXAが各国から衛星射出を受託している<ref name="jssod kibo"/><ref name="houshutsu rireki"/>。 |
||
== 概要 == |
== 概要 == |
||
[[ファイル:ISSFinalConfigEnd2006.jpg|thumb|right| |
[[ファイル:ISSFinalConfigEnd2006.jpg|thumb|right|300px|国際宇宙ステーションの完成予想CG。「きぼう」は中央手前右側に設置される。]] |
||
日本は[[アメリカ合衆国]]が[[冷戦]]末期の[[1980年代]]に、[[西側諸国]]の結束の象徴として、[[宇宙ステーション]]建設を主張した当初から参加を訴えており、計画自体は幾度の変遷を経たが、日本の立場・方針は変わらず一貫して参加を表明してきた。そのなかで日本は費用面だけでなく、構成するモジュールの建設にも意欲を示し、[[宇宙開発事業団]](NASDA・当時)が製造・保有・運用を担当することとなった。<!--総床面積は7143平方メートル<ref>[http://iss.jaxa.jp/ssip/ssip_ssof.html 宇宙ステーション運用棟]</ref>。--> |
|||
「きぼう」は日本初となる有人宇宙実験施設<ref name="kibo iss gaiyou"/>で、日本が宇宙ステーション計画への参加を決めた1985年に当時の[[宇宙開発事業団]](NASDA、現JAXA)を中心に開発が始まり<ref name="kibo handbook 1.3"/><ref name="kibo iss history 2-23"/><ref name="kibo iss history 2-24"/><ref name="kibo handbook 1.2.2"/>、完成した各部位はアメリカへ輸送された後<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/project/trans/|title=NASAへの輸送:「きぼう」日本実験棟|publisher=[[JAXA]]宇宙ステーション・きぼう 広報・情報センター|date=2007-11-16|accessdate=2019-01-19}}</ref>、スペースシャトルで3回に分けて打ち上げられ<ref name="kibo kumitate">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/|title=「きぼう」組立ミッション:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2010-09-29|accessdate=2019-01-19}}</ref>、2009年7月19日に24年の歳月をかけ完成した<ref name="kibo 2j/a kekka 090805"/>。開発費用は、きぼう本体に約2,500億円、きぼうに搭載する実験装置に約450億円、地上施設開発費と宇宙飛行士訓練費とシャトルによるきぼう打ち上げ費に約2,360億円である<ref name="kibohiyou"/>。 |
|||
「きぼう」には日本国の主権が及ぶことから管制は全て日本で行うが、電力・廃熱・[[姿勢制御]]などの宇宙基地としての基本的なインフラをアメリカ側モジュールから提供されるため、対価として施設使用権の46.7パーセントをアメリカが保有している。また、カナダは[[カナダアーム2]]の提供により施設使用権の2.3パーセントを保有する。日本が保有する施設使用権は残りの51パーセントである。 |
|||
「きぼう」は、実験を行う「船内実験室」と「船外実験プラットフォーム」、倉庫となる「船内保管室」、船外機器などを輸送する「船外パレット」、実験装置の交換などを行う「ロボットアーム」、地上との双方向通信でデータなどをやり取りする「衛星間通信システム」の6つで構成されており<ref name="kibo no tsukuri">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/kibo/|title=「きぼう」のつくり:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2014-03-17|accessdate=2019-01-19}}</ref>、全部位の結合時の大きさは長さ20.5m、高さ8.6m、幅8.9m、重さ約26トンになる<ref name="kibo handbook 3.1"/>。きぼうの部品総点数は約200万点に及ぶ<ref name="iss jisseki seika">{{Cite web|和書|url=https://www8.cao.go.jp/space/comittee/dai22/siryou3.pdf|title=国際宇宙ステーション(ISS)計画の実績と成果|publisher=JAXA|date=2014-04-23|accessdate=2018-12-04}}</ref>。 |
|||
== 開発計画 == |
|||
現行のIGA(宇宙基地協力協定)5条(登録・管轄権)により、日本は宇宙物体として登録した「きぼう」「HTV(こうのとり)」と日本人宇宙飛行士・宇宙旅行者等に対し管轄権及び管理の権限を有している<ref group="注釈">「管轄権」と「管理の権限」は、国連海洋法条約92条1項及び94条における公海上の船舶に対する旗国の権限と類似するものと解釈されている。具体的には、「管轄権」(jurisdiction)は「宇宙物体上で発生する事実や行為について、登録国が国内法の適用の対象とし(立法管轄権、自国領域外でも有効)、その遵守を強制する権限(執行管轄権、自国領域内のみ有効)」を指し、「管理の権限」(control)は「宇宙物体の活動に対する指令・追跡・管制など、関係国内法令に基づいて行われる事実上の規制行為」を指す。</ref><ref>[https://jaxa.repo.nii.ac.jp/records/4829 宇宙にかける「きぼう」 国際宇宙ステーション計画参加活動史]. 第3章 国際宇宙ステーション計画における国際協力の法的枠組み 3-17. JAXA (2011年2月28日). 2019年2月22日閲覧。</ref>。 |
|||
「きぼう」の利用に関しては、アメリカとカナダは基盤要素となる電力と居住機能(アメリカ)、ロボットアーム(カナダ)を提供しているため、「きぼう」の利用権をアメリカが46.7%、カナダが2.3%持っており、日本の利用権の割合は51%となっている(船内実験室、船外実験プラットフォーム共<ref name="kibo jikken kankyou">{{Cite web|和書|url=http://iss.jaxa.jp/kiboexp/committee/suisin-iinkai/past/pdf/19-4.pdf|title=日本の実験棟「きぼう」利用の 実験環境について|publisher=3ページ目. JAXA|date=2012-10-01|accessdate=2019-02-01}}</ref>)<ref name="iss monbu 20140929"/>。従って、日本は船内実験室の実験ラック10個と船外実験プラットフォームの実験装置10個の内、それぞれ常時5個(51%)ずつ設置でき、残りの5個はNASAが設置できる<ref name="kibo jikken kankyou"/><ref name="kibo jikken souchi"/><ref name="kibo sengai jikkensouchi"/>。また、日本が得ている電力・搭乗員作業時間(クルータイム、年約200時間)・地上との通信・物資輸送(打ち上げ重量約400kg、回収重量150kg)などのアメリカ側の利用用資源は12.8%で、宇宙飛行士の搭乗権配分も12.8%<ref group="注釈">日本人宇宙飛行士の飛行機会の配分は、システム運用共通経費(CSOC)の分担が発生する、「きぼう」の運用開始となる与圧部の取り付けと初期検証の終了時点から始まっている。</ref>{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第3章 国際宇宙ステーション計画における国際協力の法的枠組み 3-18から3-20}}となっている<ref name="kibo jikken kankyou"/><ref name="iss monbu 20140929"/><ref>{{Cite web|和書|url=https://www8.cao.go.jp/space/comittee/dai22/siryou2-3.pdf|title=国際宇宙ステーション(ISS)計画概要|publisher=文部科学省研究開発局|date=2014-04-23|accessdate=2019-01-25}}</ref>。これらの権利の対価として、日本には「きぼう」の開発・維持・運用・運用管制などを行う責任があり、船内実験室の軌道上での検証後は共通システム運用経費(Common System Operations Costs:CSOC)<ref group="注釈">ISS運用に係る共通的経費のことで、飲食料・消耗品などの補給物資や宇宙飛行士等の輸送経費、運用管制に係る施設の維持管理費や人件費などの地上経費がある。</ref>の分担義務が発生するため、[[宇宙ステーション補給機|HTV]](こうのとり)での物資輸送による現物提供を以て負担している<ref name="iss monbu 20140929"/><ref>{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2015/05/28/1358152_1.pdf|title=2016年~2020年のISS共通システム運用経費(次期CSOC)の我が国の負担方法の在り方について|publisher=文部科学省|date=2015-05-20|accessdate=2019-01-21}}</ref>。 |
|||
1985年に開発が始まった当初、「きぼう」の開発の意義・目標として「高度技術の習得」「次世代の科学や技術の促進と宇宙活動範囲の拡大」「国際協力への貢献」「宇宙環境利用の実用化の促進」の4つが示されており<ref name="kibo handbook 1.3"/>、本格的な運用が始まった2008年8月以降<ref name="kibo weekly news no.308">{{Cite web|和書|url=https://iss.jaxa.jp/weekly/080826.php|title=ISS・きぼうウィークリーニュース第308号|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-08-26|accessdate=2019-01-22}}</ref>各種実験や利用<ref>{{Cite web|和書|url=http://iss.jaxa.jp/kiboexp/field/|title=様々な利用とテーマの一覧:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2019-01-22}}</ref>により様々な成果が上がっている<ref name="kibo seika"/>。日本政府は2015年12月22日に、国際宇宙ステーションが2024年まで運用が延長されるのに伴い、アメリカ政府との協議で延長に参加することで合意しており、「きぼう」も2024年まで運用を行う予定となっている<ref>{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/059/shiryo/__icsFiles/afieldfile/2016/07/25/1374578_8.pdf|title=2024年までのISS運用延長決定及びHTV-Xの開発について|publisher=文部科学省|date=2016-07-14|accessdate=2019-01-22}}</ref><ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2015/12/20151222_iss_j.html|title=国際宇宙ステーションの運用延長参加に対する日本国政府決定について(国立研究開発法人宇宙航空研究開発機構 理事長談話)|publisher=JAXA|date=2016-07-14|accessdate=2019-01-22}}</ref>。 |
|||
== 開発 == |
|||
=== 開発の歴史 === |
|||
※宇宙ステーション全体の計画経緯は、[[フリーダム宇宙ステーション]]も参照。 |
※宇宙ステーション全体の計画経緯は、[[フリーダム宇宙ステーション]]も参照。 |
||
[[ファイル:JAXA Kibo 001.jpg|thumb|right|300px| |
[[ファイル:JAXA Kibo 001.jpg|thumb|right|300px|2005年(平成17年)10月23日に宇宙航空研究開発機構で一般公開された「きぼう」モジュール。右の黄色が船内実験室のエンジニアリングモデル(試験用に製作された実機とほぼ同じもの)<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/project/assembly/|title=実機モデルの製造、組立、試験:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2007-11-16|accessdate=2018-12-11}}</ref>、その奥が船内保管室、中央やや左のビニールの中に船外実験プラットフォーム、左奥の青いビニールに包まれているのがロボットアーム。]] |
||
[[ファイル:Power Tower Space Station Concept.jpg|thumb|right|250px|1985年6月当時、最初の計画案で「パワータワー(Power Tower)」と呼ばれた宇宙ステーションの想像図。中央付近のアンテナ下部に現在のきぼうとほぼ同じ形をした日本実験モジュールが描かれている。]] |
|||
[[ファイル:Artist's Conception of Space Station Freedom - GPN-2003-00092.jpg|thumb|right|250px|1991年当時のフリーダム宇宙ステーションの想像図。手前左側に進行方向と平行に設置されている日本実験モジュールが描かれている。]] |
|||
[[ファイル:ISS impact risk.jpg|thumb|right|250px|デブリの衝突リスクを示す図。右側にあるきぼうは、リスクが高いことがわかる。]] |
|||
[[1982年]] |
宇宙ステーション計画は、NASAの宇宙ステーションタスクフォースが[[1982年]](昭和57年)5月に設けられ、そこで宇宙ステーション計画の概念設計が始まり、同年6月にジェームズ・ベッグス[[アメリカ航空宇宙局]] (NASA) 長官から日本の[[中川一郎]][[科学技術庁長官]]へ、初めて宇宙ステーション計画への参加要請が行われた<ref name="kibo handbook 1.2.2">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=1.2.2 国際宇宙ステーション計画の経緯. JAXA|date=2008-04|accessdate=2018-12-04}}</ref>。これを受けて同年8月、日本政府は[[宇宙開発委員会]]に宇宙基地特別部会<ref group="注釈">当時は「宇宙ステーション」ではなく「宇宙基地」と呼んでいた。</ref><ref name="kibo handbook 1.3"/>を設置して検討を開始し<ref name="kibo handbook 1.2.2"/>、1983年6月に宇宙基地特別部会の中間報告が出された段階で日本実験モジュール(JEM)の基本概念はほぼ出来つつあった{{harvnb|JAXA『宇宙にかける「きぼう」』|loc=第12章 JEM 曝露部利用(科学と技術開発)への取り組み 12-9}}。 |
||
その後、[[1984年]][[1月25日]]にアメリカの[[ロナルド・レーガン|レーガン]]大統領が年頭[[一般教書演説]]において、10年以内に恒久的な有人宇宙基地の建設を指示すると明言し、そして同年6月に行われた[[ロンドンサミット]]において、日本、カナダ、欧州に対して宇宙ステーション計画への参加を要請し、これにより現在に続く宇宙ステーション計画が本格的に動き出した<ref name="kibo handbook 1.2.2"/><ref name="iss ayumi">{{Cite web|和書|url=https://iss.jaxa.jp/iss/about/plan/index_2.html|title=ISS計画の歩み:国際宇宙ステーション(ISS)|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-04-30|accessdate=2018-12-04}}</ref>。1984年の段階で独自開発ではなくNASAから共通モジュールを買う意見も出たが退けられている{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-69}}。 |
|||
日本は実験モジュールを設置することで計画に参加することになった。このときの計画では、既に与圧部(現在の船内実験室)と曝露部(現在の船外実験プラットフォーム)、それぞれの補給部(船内保管室と船外パレット)とロボットアームからなる構成が示されており、現在のきぼうと概略的には違いはない。宇宙ステーションの全体計画が大きく変化する中で、これほど変更が加えられていないのは特異とも言え、各時代の完成予想図の中で日本の区画は容易に見出すことができる。 |
|||
検討を重ねてきた宇宙基地特別部会は、[[1985年]]4月に公表した「宇宙基地計画参加に関する基本構想」において宇宙ステーション計画に日本が参加することを正式に表明し、日本は実験モジュール(JEM)を設置することで計画に参加することを決定した<ref name="kibo handbook 1.3"/><ref name="kibo iss history 2-24">{{harvnb|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-24}}</ref>。これを受けて同年5月には、NASAと[[科学技術庁]]の間で宇宙ステーション予備設計段階協力の[[了解覚書]](Memorandum of Understanding:MOU)が署名され、宇宙開発事業団(NASDA)が実施機関として参加することになり<ref name="kibo iss history 2-24"/>、55億円の開発研究予算が認可され<ref name="kibo iss history 2-24"/>、日本実験モジュールの予備設計に着手した<ref name="kibo handbook 1.3"/><ref name="kibo handbook 1.2.2"/>。 |
|||
宇宙ステーションの全体設計は繰り返し見直され、時期も延期されてきたが、これはアメリカ側が一方的に行ったことで、日本側は従うしかなかった。日本が担当した部位は実験室であり、電力や生命維持などの宇宙ステーションの基幹部分に関しては参加を許されなかった。また、輸送はスペースシャトルに依存していた。日本には、アメリカに強く意見できるだけの影響力はなかったのである。 |
|||
計画への参加を表明した日本は、宇宙開発事業団(NASDA)を中心に開発を担うことになったが<ref name="kibo iss history 2-24"/>、当時のNASDAには有人宇宙開発に関する部署がなかったため、小さな会議室を割り当てた上で、ロケットや人工衛星の開発に従事していた人員、白木邦明元JEMプロジェクトマネージャーをはじめ3人のみで開発が始まった<ref name="kibo kaihatsu youtube">{{Cite web|和書|url=https://www.youtube.com/watch?v=htVd2B95yM4|title=未来への挑戦~日本初 有人宇宙施設「きぼう」開発物語~|publisher=2:36-3:55. YouTube JAXA公式チャンネル|date=2010-04-19|accessdate=2019-01-29}}</ref>。 |
|||
[[ファイル:ISS impact risk.jpg|thumb|right|200px|デブリの衝突リスクを示す図。右側にあるきぼうは、リスクが高いことがわかる。]] |
|||
特に、[[1993年]]に行われた変更で、きぼうは大きな影響を受けた。それまでは宇宙ステーションの進行方向前側に居住モジュールとスペースシャトルのドッキング装置が、後側に日欧の実験モジュール(現在のきぼうと[[コロンバス (ISS)|コロンバス]])を設置する計画だったが、この変更で日欧のモジュール設置位置は進行方向前側に設定された。また、進行方向と平行に設置される予定だったものが、横向きに変更された。この場所は[[スペースデブリ|デブリ]]の衝突を受ける可能性が高く、しかもモジュール側面を大きく晒すことになったため、きぼうはデブリシールドと呼ばれる外部装甲板の厚さを増すなどして強化された。 |
|||
日本実験モジュールの予備設計は1987年3月に完了し<ref name="kibo handbook 1.3">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=1.3 「きぼう」開発経緯. JAXA|date=2008-04|accessdate=2018-12-04}}</ref>、1987年度から日本実験モジュールの開発予算が計上されたものの<ref name="kibo iss history 2-31">{{harvnb|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-31}}</ref>、IGAが国会で承認されるまでは予備設計の延長作業などが行われた<ref name="kibo iss history 2-31"/>。そして、1988年9月に宇宙基地に関する多国間協力協定(旧IGA、1998年1月に新IGAとなる「民生用国際宇宙基地のための協力に関するカナダ政府、欧州宇宙機関の加盟国政府、日本国政府、ロシア連邦政府及びアメリカ合衆国政府の間の協定」{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第3章 国際宇宙ステーション計画における国際協力の法的枠組み 3-4}}(改正宇宙基地協力協定)に改定{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-54}})が署名され、[[1989年]][[6月22日]]に「常時有人の民生用宇宙基地の詳細設計、開発、運用および利用における協力に関するアメリカ合衆国政府、欧州宇宙機関の加盟国政府、日本国政府およびカナダ政府の間の協定(Intergovernmental Agreement:IGA)」が国会で承認された。これにより、当時フリーダムと呼ばれた<ref group="注釈">宇宙ステーションは、1988年にレーガン大統領によって「フリーダム」と名付けられている。</ref><ref name="monbu nippon space history 5-1">{{Cite web|和書|url=https://www.mext.go.jp/a_menu/kaihatu/space/kaihatsushi/detail/1299935.htm|title=宇宙開発利用 我が国の宇宙開発史 第五章日本の有人宇宙技術の発展 (1)全体計画の経緯|publisher=文部科学省|date=2011-02|accessdate=2019-02-12}}</ref>国際宇宙ステーション計画は予備設計段階から開発段階へと移り、日本の実験モジュールの開発も本格的に始まった<ref name="kibo handbook 1.2.2"/><ref name="iss ayumi"/>。 |
|||
;開発担当企業 |
|||
* [[三菱重工業]] - 与圧部(船内実験室・船内保管室)<ref>[http://www.mhi.co.jp/products/detail/japanese_experiment_module.html 三菱重工 日本実験モジュール「きぼう (JEM) 」]</ref> |
|||
日本は実験モジュールの予備設計に入った1985年4月の段階で、既に与圧部(現在の船内実験室)と曝露部(現在の船外実験プラットフォーム)、それぞれの補給部(船内保管室と船外パレット)とロボットアームからなる構成が示されており<ref name="kibo iss history 2-23">{{harvnb|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-23 図2-15及び図2-16}}</ref><ref name="kibo iss history 2-37"/><ref name="jaxas 037"/>、1987年4月から1991年にかけて何度も行われたアメリカによる宇宙ステーション基準概念の変更(1987年-1989年にリフェージング(Rephasing)、1990年-1991年にリストラクチャリング(Restructuring))<ref name="kibo iss history 2-34,35,36">{{harvnb|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-34から36}}</ref><ref name="kibo iss history 12-10">{{harvnb|JAXA『宇宙にかける「きぼう」』|loc=第12章 JEM 曝露部利用(科学と技術開発)への取り組み 12-10}}</ref>への対応で1991年5月に示された日本実験モジュールの最終コンフィギュレーションが元である、現在の「きぼう」と概略的には違いはない<ref name="kibo iss history 2-37"/>。宇宙ステーションの全体計画が大きく変化し<ref name="kibo iss history 2-34,35,36"/>、アメリカや欧州の各モジュールの規模が大幅に縮小される中<ref name="kibo iss history 12-3">{{harvnb|JAXA『宇宙にかける「きぼう」』|loc=第12章 JEM 曝露部利用(科学と技術開発)への取り組み 12-3}}</ref>、日本実験モジュールの基本構成はほとんど変わらなかった<ref name="kibo iss history 2-37">{{harvnb|JAXA『宇宙にかける「きぼう」』|loc==第2章 宇宙ステーション計画参加活動の全体経緯 2-37 図2-22 JEM 基準コンフィギュレーション変遷}}</ref>。 |
|||
* [[アイ・エイチ・アイ・エアロスペース]] - 曝露部(船外実験プラットフォーム・曝露パレット)・与圧部搭載ラック・実験装置等<ref>[http://www.ihi.co.jp/ia/product/spaceproject.html IHIエアロスペース (ロケット関連技術) 国際宇宙ステーション計画] {{webarchive|url=https://web.archive.org/web/20120124163148/http://www.ihi.co.jp/ia/product/spaceproject.html |date=2012年1月24日 }}</ref> |
|||
* [[川崎重工業]] - エアロック・EF/PM結合機構<ref>[http://www.khi.co.jp/knews/backnumber/bn_2008/pdf/news149_01.pdf Kawasaki News 149号]</ref> |
|||
宇宙ステーションの全体設計はNASAによって繰り返し見直され<ref name="kibo iss history 2-37"/><ref name="kibo iss history 2-34,35,36"/>、完成時期も何度も延期されてきた<ref name="kibo iss history 12-3"/>中で、日本側は翻弄され日本実験モジュールも大きな影響を受けた<ref name="kibo iss history 2-34,35,36"/><ref>{{Cite web|和書|url=https://www.youtube.com/watch?v=htVd2B95yM4|title=未来への挑戦~日本初 有人宇宙施設「きぼう」開発物語~|publisher=8:00-10:05. YouTube JAXA公式チャンネル|date=2010-04-19|accessdate=2019-01-29}}</ref>。 |
|||
* [[NECスペーステクノロジー|NEC東芝スペースシステム]] - ロボットアーム、衛星間通信システム、管制制御装置 (JCP)、実験装置<ref>[http://www.nec.co.jp/solution/space/kibo/index.html NEC 宇宙ソリューション きぼう] {{webarchive|url=https://web.archive.org/web/20100129091116/http://www.nec.co.jp/solution/space/kibo/index.html |date=2010年1月29日 }}</ref> |
|||
特に、[[1993年]]2月の[[ビル・クリントン|クリントン]]大統領による計画縮小の指示による変更と、ロシアの参加で日本実験モジュールは大きな影響を受けた。急遽編成された国際宇宙ステーション計画の再設計チーム(Station Redesign team:SRT)は、リデザイン(Redesign)と称して見直し案を90日間で3つ立案(α:アルファ、β:ベータ、γ:ガンマ、の3案<ref name="kibo iss history 12-3,10"/>)し、大統領諮問委員会(Blue Ribon Panel)の答申を受けたクリントン大統領はこの3つの案の中からフリーダムを簡素化した案を選び、最終的に「デザインα(軌道傾斜角は28.5度、搭乗員は4人のまま<ref name="kibo iss history 2-41to2-44">{{harvnb|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-41から2-44}}</ref>)」として再設計された案を軸に建設が進められることになった<ref name="kibo handbook 1.2.2"/><ref name="iss ayumi"/>。 |
|||
それまでの計画では、宇宙ステーションの進行方向前側に居住モジュールとスペースシャトルのドッキング装置が、後側に日本と欧州宇宙機関(ESA)の実験モジュール(現在のきぼうと[[コロンバス (ISS)|コロンバス]])を設置する計画だったが、この見直しによりISSから日本実験モジュールへの電力供給が減ったため、その見返りに日本実験モジュールの設置場所がコロンバスと共にISSの汚染環境が最もひどい後方から進行方向側最前方に変更され、曝露実験の環境としては最適な位置となった<ref name="kibo iss history 12-10"/><ref name="pmaj 200802 yowa4">{{Cite web|和書|url=https://www.pmaj.or.jp/online/0802/message3.html|title=オンラインジャーナル2008年2月号/宇宙ステーション余話 第4回|publisher=[[日本プロジェクトマネジメント協会]]|date=2008-02|accessdate=2018-12-17}}</ref>。その反面、進行方向と平行に設置される予定だったものが横向きに変更された上、この場所は[[スペースデブリ|デブリ]]の衝突を受ける可能性が高く、しかもモジュール側面を大きく晒すことになったため、きぼうは船体の壁の厚さを当初の3.2mmから4.8mmに厚くした上で、デブリシールドと呼ばれる外部装甲板(デブリバンパー)の厚さを増すなどして強化することとなった<ref name="pmaj 200802 yowa4"/>。加えて、この場所は太陽の日射量の変化が激しいため、厳しい温度変化に対応すべく船内実験室の大規模な熱制御システムの開発も行われることとなった<ref name="pmaj 200802 yowa4"/>。 |
|||
更に、1993年12月6日に行われたワシントンでのIGA政府間協議において、ロシアの国際宇宙ステーション計画への招請が決まり、同月にこの招請を受諾したロシアがISS計画に参加することになったが、それに伴う新しい計画であるロシアンα(アルファ、搭乗員が6人へ)への変更により、ロシアの射場からISSへロケットを打ち上げられるようにするため、ISSの軌道傾斜角が当初の28.5度から51.6度に変更されることになった<ref name="kibo handbook 1.2.2"/><ref name="jaxas 037"/><ref name="pmaj 200802 yowa4"/><ref name="kibo iss history 2-45">{{harvnb|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-45}}</ref><ref name="kibo faq iss 39"/>。 |
|||
この結果、日本実験モジュールをスペースシャトルで打ち上げるにあたり、軌道傾斜角が増したことによりスペースシャトルでの打ち上げ可能質量が減ったため、1995年6月に組み立て順序が改訂され、当初は1回目でロボットアームを取り付けた日本実験モジュール与圧部(現船内実験室)、2回目がそれ以外の計2回を予定していた日本実験モジュールの運搬回数が3回に分けて運ばれることになった。また、与圧部を内装した状態では打ち上げられないため、日本実験モジュール補給部(現船内保管室)に冗長系システム機器を入れて与圧部より先に打ち上げられることになった<ref name="kibo handbook 1.2.2"/><ref name="jaxas 037">{{Cite web|和書|url=https://fanfun.jaxa.jp/c/media/file/media_jaxas_jaxas037.pdf|title=JAXA's No.037|publisher=JAXA|date=2011-03-01|accessdate=2018-11-22}}</ref><ref name="pmaj 200802 yowa4"/><ref name="kibo iss history 2-45"/><ref name="kibo faq iss 39">{{Cite web|和書|url=http://iss.jaxa.jp/iss_faq/iss/iss_039.html|title=なぜ船内実験室より先に船内保管室が打ち上げられたのですか:よくある質問|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2010-08-17|accessdate=2019-01-04}}</ref>。その反面、この軌道傾斜角が増えたことにより船外実験プラットフォームに設置される後述のMAXIやSMILESなどの全天観測及び地球全周観測が目的の実験機器にとっては都合の良い条件となった<ref name="kibo iss history 12-10"/>。 |
|||
このように、紆余曲折を経ながらも日本実験モジュールの規模自体は縮小されず現在のきぼうに至っている<ref name="jaxas 037"/>。なお、1995年3月に[[ジョンソン宇宙センター]]で行われた宇宙ステーションの第1回目の設計審査(Incremental Design Review#1:IDR)で、宇宙ステーション計画の名称が「フリーダム宇宙ステーション(SSF)」から現在の「国際宇宙ステーション(ISS)」と呼ばれるようになった<ref group="注釈">当初は、リデザイン3案のうちα案が選ばれたことからISSA(International Space Station Alpha)と呼ばれていた。</ref><ref name="kibo handbook 1.2.2"/><ref name="kibo iss history 12-3,10">{{harvnb|JAXA『宇宙にかける「きぼう」』|loc=第12章 JEM 曝露部利用(科学と技術開発)への取り組み 12-3及び12-10}}</ref><ref name="monbu nippon space history 5-1"/>。 |
|||
=== 開発の過程 === |
|||
[[ファイル:Node 2 and kibo.jpg|thumb|right|250px|ケネディ宇宙センターの宇宙ステーション整備施設(SSPF)に運ばれた船内実験室(奥)。手前はノード2([[ハーモニー (ISS)|ハーモニー]])。(2003年)]] |
|||
[[ファイル:JAXA Kibo 002.jpg|thumb|right|250px|筑波宇宙センター無重量環境試験棟にある無重量環境模擬水槽内の「きぼう」日本実験棟の実物大模型<ref name="tsukuba mujuuryoku sikentou">{{Cite web|和書|url=https://iss.jaxa.jp/ssip/ssip_wet.html|title=無重量環境試験棟:運用管制施設|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-09-12|accessdate=2018-12-21}}</ref>。(2005年10月)]] |
|||
「きぼう」の開発は各構成要素ごとに、「開発基礎試験」、「エンジニアリングモデル(Engineering Model:EM)製作試験」、「プロトフライトモデル(Proto Flight Model:PFM)製作試験」の3段階に分けて行われているが<ref name="kibo kaihatsu katei">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/project/development/|title=開発:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2007-11-16|accessdate=2018-12-11}}</ref>、最初に取り組まれたのは使いやすさや圧迫感がないかといった宇宙ステーションに滞在する宇宙飛行士の快適性を考えた心理学的な技術要求を明らかにすることから始まった<ref name="koyamachuya rensai4"/>。 |
|||
「開発基礎試験」では、各構成要素の構造や機能の検討を行い、また、実物大模型(モックアップ)や宇宙用部品でなく地上の民生品や材料を使ったブレッドボードモデル(Bread Board Model:BBM)を製作して、アクセス性評価試験など各種試験を行い、基本的な設計の実現性を確認するためのデータを取得し、問題点の洗い出しを行い解決している<ref name="kibo kaihatsu katei"/>。 |
|||
「エンジニアリングモデル製作試験」では、実機(フライトモデル)とほぼ同じ形態の技術試験モデルを作り、設計や製造工程の妥当性を確認するための各種試験を行いデータを取得し、 |
|||
機械的・電気的な設計仕様、試験方法、製造工程の確立を行った。問題点・欠陥の洗い出しのため、実際の運用条件より厳しい過剰な負荷を与える試験も行われている。このエンジニアリングモデル製作試験は、筑波宇宙センターで行われた各構成要素を結合しての全体システム試験が1998年10月に終わったことにより完了している<ref name="kibo kaihatsu katei"/>。 |
|||
「プロトフライトモデル製作試験」では、実際にISSに設置される実機モデルが「エンジニアリングモデル製作試験」の時に確立された設計仕様・製造工程で製作され、実際の運用条件での各種試験が行われ、材料や製作上の欠陥がないことを確認している<ref name="kibo kaihatsu katei"/>。 |
|||
この実機モデル製作の流れは、各部品のフライト品が完成すると各要素ごとに組み立てと音響試験、モーダルサーベイ試験、熱真空試験、電磁適合性試験など10種類以上の試験<ref name="kibo kaihatsu katei"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_flow.html|title=「きぼう」日本実験棟の開発試験の流れ|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=1999-12-08|accessdate=2019-02-15}}</ref><ref name="jaxa kibo develop history"/>が行われた。各要素の検証作業が終わると筑波宇宙センター宇宙ステーション試験棟<ref name="tsukuba ssip shikentou">{{Cite web|和書|url=https://iss.jaxa.jp/ssip/ssip_sst.html|title=宇宙ステーション試験棟:運用管制施設|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2013-03-26|accessdate=2019-02-14}}</ref>に各要素を集めたうえで結合させ、各部の統合試験<ref name="tsukuba ssip shikentou"/>が行われた他、ISS本体とのインターフェース試験などを行う「きぼう」日本実験棟の全体システム試験<ref name="tsukuba ssip shikentou"/>(2001年9月-2002年5月<ref name="jaxa kibo develop history">{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status.html|title=「きぼう」日本実験棟開発の歴史|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2007-03-13|accessdate=2019-02-14}}</ref>)、モジュールリーク試験などが行われた<ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_29.html|title=「きぼう」日本実験棟の全体システム試験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2002-07-04|accessdate=2019-02-14}}</ref>。これが終わると、きぼうは3回に分けて打ち上げられるため、各打ち上げコンフィギュレーションの試験が行われた<ref name="kibo jikki seizou siken">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/project/assembly/|title=実機モデルの製造、組立、試験:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2007-11-16|accessdate=2019-02-12}}</ref>。 |
|||
この試験が終わった後、船内実験室が2003年4月22日から6月6日にかけて<ref name="kibo sennai jikkenshitsu amerika">{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_35.html|title=「きぼう」船内実験室、ついに米国へ出発|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2003-05-04|accessdate=2019-02-15}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_36.html|title=「きぼう」船内実験室、米国到着|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2003-06-20|accessdate=2019-02-15}}</ref>、船内保管室、ロボットアーム、実験ラックが2006年12月から2007年3月にかけて<ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_51.html|title=「きぼう」船内保管室、「きぼう」ロボットアーム、実験ラックの輸送|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2007-03-13|accessdate=2019-02-15}}</ref>、船外実験プラットフォーム、船外パレットが2008年9月19日から9月24日にかけて<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/2ja/news/ef_transport02.html|title=「きぼう」船外実験プラットフォーム、船外パレットが米国に到着:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-10-07|accessdate=2019-02-15}}</ref>ケネディ宇宙センターへと輸送されている<ref name="kibo jikki seizou siken"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/project/trans/|title=NASAへの輸送:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2007-11-16|accessdate=2019-02-12}}</ref>。ケネディ宇宙センターに到着後、各要素は宇宙ステーション整備施設(Space Station Processing Facility: SSPF)に搬入され、JAXAやNASAによる適合性確認試験(Multi-Element Integration Test-III:MEIT-III)<ref name="kibo sennai jikkenshitsu amerika"/>などの各種試験や打ち上げ前の整備作業が行われ後スペースシャトルで打ち上げられた<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/project/integration/|title=打上げ整備作業:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2007-12-17|accessdate=2019-02-12}}</ref>。 |
|||
なお、きぼうの開発では実機の開発製造だけでなく、打ち上げ後の軌道上での組立手順や宇宙飛行士の移動方法などの開発も行われており、筑波宇宙センター無重量環境試験棟(Weightless Environment Test Building:WET)内の無重量環境試験設備の1つである直径16m、深さ10.5mの無重量環境模擬水槽(Weightless Environment Test System:WETS)<ref group="注釈">日本初の無重量環境試験設備として川崎重工業によって1994年7月26日に完成したが、2011年3月11日に起きた[[東日本大震災]]により、配管の破損による水漏れなどの大きな被害を受けたため、復旧は困難として2012年2月に撤去されている。</ref><ref>[https://shashi.shibusawa.or.jp/details_nenpyo.php?sid=6280&query=&class=&d=all&page=142 “渋沢社史データベース 川崎重工業株式会社百年史 : 1896-1996. 資料・年表”]. [[公益財団法人]][[渋沢栄一記念財団]]. 2018年11月7日閲覧。</ref><ref>[https://twitter.com/Aki_Hoshide/status/170090877795053568 “星出 彰彦 (JAXA宇宙飛行士)@Aki_Hoshideさん | Twitter”]. Twitter (2012年2月16日). 2019年2月19日閲覧。</ref>にて、「きぼう」の実物大模型(モックアップ)を水中に設置して船外活動手順開発試験が2000年1月<ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_20.html|title=第2回「きぼう」日本実験棟船外活動手順開発試験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2002-10-31|accessdate=2019-02-18}}</ref>-2005年11月にかけて6回に分けて行われた<ref name="tsukuba mujuuryoku sikentou"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_45.html|title=第6回船外活動手順開発試験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2006-02-17|accessdate=2019-02-18}}</ref>。ここでは他に船外活動無重量シミュレーション試験も行われている<ref name="tsukuba mujuuryoku sikentou"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_01.html|title=「きぼう」日本実験棟第4回船外活動無重量シミュレーション試験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=1999-03-10|accessdate=2019-02-18}}</ref>。 |
|||
=== 名称 === |
|||
「きぼう(KIBO)」という愛称は1999年4月に宇宙開発事業団(当時)が「JEM」の愛称を公募して決まったもので<ref name="kibo handbook 1.3"/>、漫画家の[[松本零士]]や[[向井千秋]]宇宙飛行士などが選考委員を務め、2万227人に上る応募者の内、「きぼう(KIBO)」で応募した総数は132人であった<ref name="kibo aishou yomiuri 080323">{{Cite web|和書|url=http://www.yomiuri.co.jp/science/news/20080323-OYT1T00009.htm|title=「きぼう」命名者名簿を廃棄…名付け親誰なのか不明に|publisher=[[読売新聞]]|url-status=dead|url-status-date=2008-03-23|archiveurl=https://web.archive.org/web/20080326072134/http://www.yomiuri.co.jp/science/news/20080323-OYT1T00009.htm|archivedate=2008-03-26|accessdate=2019-01-17}}</ref>。宇宙開発事業団から組織改編された宇宙航空研究開発機構が、応募者名簿を2005年4月の[[個人情報保護法]]施行の際に独自の判断により破棄したことが2008年3月22日に判明し、「きぼう」の命名者も一時不明になっていたが<ref name="kibo aishou yomiuri 080323"/>、同3月25日に筑波宇宙センターの資料保管庫で再発見されている<ref>{{Cite web|和書|url=http://www.yomiuri.co.jp/science/news/20080325-OYT1T00531.htm|title=「きぼう」命名者名簿、宇宙機構の資料保管庫で“発見”|publisher=読売新聞|url-status=dead|url-status-date=2008-03-25|archiveurl=https://web.archive.org/web/20080328020121/http://www.yomiuri.co.jp/science/news/20080325-OYT1T00531.htm|archivedate=2008-03-28|accessdate=2019-01-17}}</ref>。また、2000年5月にきぼう各部の通称が決まり、与圧部が「船内実験室」に、曝露部が「船外実験プラットフォーム」に、マニピュレーターが「ロボットアーム」に、補給部与圧区が「船内保管室」に、補給部曝露区が「船外パレット」に、そしてJEMは「「きぼう」日本実験棟」にそれぞれ決まっている<ref name="kibo handbook 1.3"/>。 |
|||
=== 費用 === |
|||
1984年4月に[[NASDA]]が[[科学技術庁]]に提出した資料では、実験モジュールと共通実験装置の開発費が約3,000億円弱、実験装置開発費を除く年間運用利用費は約300億円強で、スペースシャトル1回の打ち上げ費は8,300万ドル(1984年レート、1ドル230円)と見積もっている{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-18}}。また、1986年の段階で推定された開発費は、1987年度以降に日本実験モジュールの開発費が約2,600億円、宇宙環境利用共通技術や共通実験装置開発費などに約450億円と見積もられ、日本実験モジュールの打ち上げ費は実費支弁契約が想定された{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-26}}。 |
|||
実績値としては、きぼうの運用と利用を主たる目的とした日本における国際宇宙ステーション計画の2010年までの総費用は約7,100億円で、その内訳は、きぼう開発費に約2,500億円、きぼう実験装置開発費に約450億円、[[宇宙ステーション補給機|HTV]]開発費(技術実証機の建造費含む)に約680億円、地上施設開発費と宇宙飛行士訓練費とシャトルによるきぼう打ち上げ費に約2,360億円、運用費(管制・保全など)と利用費(実験関連費)に約1,100億円である。なお、ここには[[H-IIB]]ロケットの開発費は含まない<ref name="kibohiyou">{{Cite web|和書|url=https://www.mext.go.jp/component/b_menu/shingi/toushin/__icsFiles/afieldfile/2010/07/08/1295296_4.pdf|title=付録1 国際宇宙ステーション(ISS)計画概要(その3)|publisher=宇宙開発委員会 国際宇宙ステーション特別部会 -中間とりまとめ- 平成22年6月 [http://www.mext.go.jp/b_menu/shingi/uchuu/015/003/houkoku/1295296.htm]. [[文部科学省]]|date=2010-06|accessdate=2018-12-11}}</ref><ref name="naikakufu kibo kaihatsuhi"/>。 |
|||
2011年以後の1年毎の日本の国際宇宙ステーション計画費用は約400億円で、その内訳は、運用費(管制・保全・宇宙飛行士訓練など)に約90億円、利用費(実験関連費)に約60億円、物資輸送費(H-IIBによるHTV(こうのとり)打ち上げ)に約250億円である<ref name="kibohiyou"/>。日本の宇宙開発費のうちJAXA独自の予算は毎年約1,800億円であり、毎年約400億円の支出となる国際宇宙ステーション計画費用は日本の宇宙開発予算の中で情報収集衛星に次ぐ比重を占めている<ref name="naikakufu kibo kaihatsuhi">{{Cite web|和書|url=https://www8.cao.go.jp/space/seminar/dai1/cao-8.pdf|title=我が国宇宙政策の課題と方向性|publisher=[[内閣府]]|date=2012-09|accessdate=2018-12-04}}</ref>。ただ、2010年以降は日本の負担するISS関連経費は減少傾向にあり<ref name="iss monbu 20140929"/>、2018年度は約342億円となっている<ref>{{Cite web|和書|url=http://iss.jaxa.jp/user/pdf/kibou_introduction_japanese_180629.pdf|title=有人宇宙技術部門紹介パンフレット|publisher=11ページ目. JAXA|date=2018-06|accessdate=2018-12-04}}</ref>。 |
|||
(各国ごとの支出は[[国際宇宙ステーション#費用|国際宇宙ステーション]]を参照。) |
|||
=== 開発担当企業 === |
|||
主要な開発担当企業は以下の通り<ref name="kibo maker">{{Cite web|和書|url=https://fanfun.jaxa.jp/faq/detail/282.html|title=「きぼう」日本実験棟の開発にはどんなメーカーが携わっていたのですか ?| ファン!ファン!JAXA!|publisher=JAXA|accessdate=2018-11-23}}</ref>。 |
|||
* [[三菱重工業]] - 与圧部(船内実験室・船内保管室)・全体の取りまとめを担当<ref name="kibo mitsubishi seihin">{{Cite web|和書|url=https://www.mhi.com/jp/products/space/japanese_experiment_module.html|title=三菱重工 | 日本実験モジュール「きぼう(JEM)」|publisher=三菱重工業|accessdate=2018-11-23}}</ref><ref>{{Cite web|和書|url=https://www.mhi.co.jp/technology/review/pdf/391/391020.pdf|title=日本実験モジュール“きぼう”の開発|publisher=三菱重工業|date=2002-01|accessdate=2018-12-04}}</ref>。 |
|||
* [[石川島播磨重工業]](現[[IHI]]) - 曝露部(船外実験プラットフォーム)・国際標準実験ラック(ISPR)・熱制御系の一部・実験支援系(共通ガス供給装置(Common Gas Supply. Equipment:CGSE))・実験データ処理装置(Payload Data Handling unit:PDH)を担当<ref>[http://www.ihi.co.jp/ia/product/spaceproject.html IHIエアロスペース (ロケット関連技術) 国際宇宙ステーション計画]{{webarchive|url=https://web.archive.org/web/20120124163148/http://www.ihi.co.jp/ia/product/spaceproject.html |date=2012年1月24日 }}</ref><ref>{{Cite web|和書|url=https://www.ihi.co.jp/ia/products/space/iss/index.html|title=国際宇宙ステーション | 宇宙開発 | 事業紹介 | 株式会社IHIエアロスペース|publisher=IHIエアロスペース|accessdate=2018-11-23}}</ref>。 |
|||
* [[日産自動車]](現[[アイ・エイチ・アイ・エアロスペース]]) - 曝露部(船外パレット)を担当。 |
|||
* [[川崎重工業]] - エアロック・EF/PM結合機構・環境制御装置(船内実験室用空気調和装置、船内保管室用空気循環ファンなど)を担当<ref>{{Cite web|和書|url=https://www.khi.co.jp/knews/pdf/news149.pdf|title=Kawasaki News 149 Winter2008|publisher=川崎重工業|date=2008-01|accessdate=2018-11-23}}</ref>。 |
|||
* [[NEC東芝スペースシステム]](現[[NECスペーステクノロジー]]) - ロボットアーム親アーム・衛星間通信システム(Inter-orbit Communication System:ICS)与圧系サブシステム及び曝露系サブシステム・きぼうのメインコンピューターの管制制御装置 (JEM Control Processor:JCP)・ネットワークシステム・実験装置<ref>[http://www.nec.co.jp/solution/space/kibo/index.html NEC 宇宙ソリューション きぼう]{{webarchive|url=https://web.archive.org/web/20100129091116/http://www.nec.co.jp/solution/space/kibo/index.html |date=2010年1月29日 }}</ref><ref name="NEC gihou vol.64 no.1 kibo">{{Cite web|和書|url=https://jpn.nec.com/techrep/journal/g11/n01/pdf/110107.pdf|title=NEC技報 Vol.64 No.1(2011年3月)宇宙特集 国際宇宙ステーション日本実験棟「きぼう(JEM)」の開発|publisher=[[NEC]]|date=2011-03|accessdate=2018-12-04}}</ref>。 |
|||
* [[日立製作所]] - ロボットアーム子アームを担当。 |
|||
* [[三菱電機]] - 電力系(Electrical Power System:EPS)・テレビモニターを担当。 |
|||
地上運用には、有人宇宙システム株式会社、[[ソラン]](現[[TIS (企業)|TIS]])、株式会社エイ・イー・エス、[[三菱スペース・ソフトウエア]]、[[宇宙技術開発]]株式会社などが関わっている。また、[[NTTデータ]]、[[三菱プレシジョン]]、[[三菱電線工業]]、[[横浜ゴム]]、[[メイラ]]、[[大陽日酸]]、[[中菱エンジニアリング]]、西菱エンジニアリング(現MHIニュークリアシステムズ・ソリューションエンジニアリング)、[[光製作所]]、[[MHIエアロスペースシステムズ]]、[[ミネベア]]などの企業<ref name="monbu ISS tansa 20141029">{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/10/29/1352848_2_1.pdf|title=ISS・国際宇宙探査の取り組み及び期待について|publisher=5ページ目. 文部科学省|author=三菱重工業|date=2014-10-22|accessdate=2019-01-31}}</ref>の他、株式会社田中(現SDC田中、大阪市)や川西航空機器工業(兵庫県)、東成エレクトロビーム(東京都)、竹中システム機器(京都府)、瑞木製作所(愛知県)などの中小企業も開発に携わっている<ref name="iss seika monbu 20140520 13-18"/>。 |
|||
きぼうの開発・運用に参加している企業は約650社で<ref name="jaxas 037"/><ref name="kibo maker"/>、国内の宇宙に携わるほぼ全ての企業が参加している<ref name="monbu ISS tansa 20141029"/>。また、2013年までにきぼうの運用に約380社、利用に約350社が参加している<ref>{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/06/04/1347862_2.pdf|title=「きぼう」の今後の利用方針・計画について(詳細版)|publisher=2ページ目. 文部科学省|date=2014-05-30|accessdate=2019-01-31}}</ref>。 |
|||
== 打ち上げと組み立て == |
== 打ち上げと組み立て == |
||
[[ファイル:STS-124 Kibo.jpg|thumb|right|250px|ISSに接続された船内実験室、背後はスペースシャトルで、右上に写っているのはハーモニーに仮設置されている船内保管室。この後、船内保管室は船内実験室天頂側に移設された。(2008年6月)]] |
|||
「きぼう」は[[スペースシャトル]]によって3回に分けてISSに運ばれ、組み立てられた。当初は[[2006年]]([[平成]]18年)から[[2008年]](平成20年)までに[[宇宙]]に運ばれ、運用が始まるはずであった。しかし、[[2003年]](平成15年)2月にスペースシャトル「[[コロンビア (オービタ)|コロンビア]]」が空中分解、乗組員全員が死亡する[[コロンビア号空中分解事故|事故]]が発生し、ISSの建設は遅れた。また[[アメリカ航空宇宙局]] (NASA) はシャトル使用を[[2010年]]までとしたため(その後2011年に延期)、この年でISS建設も実質建設は終了した。「きぼう」の打ち上げも相当な遅れが予想されたが、2006年3月の日米協議によって[[2007年]](平成19年)から[[2009年]](平成21年)に打ち上げることで最終合意した。 |
|||
[[ファイル:Kibo PM and ELM-PS.jpg|thumb|right|250px|移設後の船内実験室と船内保管室。(2008年6月)]] |
|||
[[ファイル:Endeavour from ISS before docking.jpg|thumb|right|250px|船外実験プラットフォーム、船外パレット、衛星間通信システムの曝露系サブシステム(ICS-EF)などを搭載したエンデバー。(2009年7月)]] |
|||
[[ファイル:Kibo completed view1.jpg|thumb|right|250px|全ての組み立てが完了し、完成したきぼう。(2009年7月)]] |
|||
[[ファイル:STS-135 final flyaround of ISS 1.jpg|thumb|right|300px|全ての組み立てが完了し、完成した国際宇宙ステーション。画面中央にきぼうが見える。右上の白い点は月。(2011年7月)]] |
|||
「きぼう」は[[スペースシャトル]]によって3回に分けてISSに運ばれ組み立てられた<ref name="kibo kumitate"/>。これは、日本がISS計画への参加を表明した1985年当時から、日本の実験モジュールをスペースシャトルで打ち上げることが決まっていたためで、スペースシャトルの貨物室の寸法・打ち上げ能力に合わせて大きさや重さが設計されている<ref name="tokushuu spaceshuttle kibo 20111031"/>。当初の「きぼう」の打ち上げ時期は、1986年3月下旬に行われた宇宙ステーション全体のシステム要求審査(System Requirement Review:SRR)の段階で、合計14回と設定されたスペースシャトルの打ち上げを3段階に分けた内の3段階目となる1994年であった{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-26}}。 |
|||
しかし、アメリカの杜撰な開発管理に端を発する宇宙ステーション計画の度重なる変更や<ref name="kibo iss history 2-34,35,36"/>、アメリカの財政悪化に伴う宇宙ステーション計画の変更やロシアの参加<ref name="kibo iss history 2-41to2-44"/>、ロシアのサービスモジュールの開発遅延<ref name="kibo handbook 1.2.2"/>{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-53,2-57,2-58}}など、さまざまな理由で幾度となく「きぼう」の打ち上げ時期や見通しが変更されてきた<ref name="kibo handbook 1.2.2"/><ref name="kibo iss history 2-34,35,36"/>{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-38,2-41,2-46,2-47,2-53,2-55,2-57,2-58,2-61.2-66}}。 |
|||
その後、[[2003年]](平成15年)2月にスペースシャトル「[[スペースシャトル・コロンビア|コロンビア]]」が空中分解、乗組員全員が死亡する[[コロンビア号空中分解事故|事故]]が発生したため、ISSの建設が遅れると同時に「きぼう」の打ち上げ時期もさらに遅れることとなった<ref name="tokushuu spaceshuttle kibo 20111031">{{Cite web|和書|url=https://www.jaxa.jp/article/special/spaceshuttle/yokoyama01_j.html|title=JAXA|日本の有人宇宙活動の原動力は「きぼう」|publisher=JAXA|date=2011-10-31|accessdate=2019-01-23}}</ref>。また[[アメリカ航空宇宙局]] (NASA) はシャトル運用を2010年までとしたため<ref name="kibo handbook 1.2.2"/>(その後退役が延期され、2011年8月31日にスペースシャトルプログラムは正式に終了している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss_faq/shuttle/|title=よくある質問 スペースシャトルに関するQ&A スペースシャトルは最後のフライトを終えましたが、もう飛行することはできないのですか?|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2011-09-06|accessdate=2019-01-25}}</ref>。)、2011年7月21日にISSの建設は終了し完成した<ref>{{Cite web|和書|url=http://iss.jaxa.jp/iss/about/|title=ISSとは:国際宇宙ステーション(ISS)|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-07-11|accessdate=2019-01-17}}</ref>。スペースシャトル打ち上げ再開後の「きぼう」の打ち上げ時期については、4つあるISSの太陽電池パネル設置前に「きぼう」を取り付けると電力が足りなくなる恐れがあったため、NASA側は打ち上げを遅らせたい意向を示していたが、JAXAは早く打ち上げるよう交渉し<ref name="tokushuu spaceshuttle kibo 20111031"/>、2006年3月2日に行われた国際宇宙ステーション計画に関する宇宙機関長会議によって2007年(平成19年)から2009年(平成21年)に打ち上げることで最終合意している<ref name="kibo iss hoa kekka 20060308">{{Cite web|和書|url=https://www.jaxa.jp/press/2006/03/20060308_sac_hoa.pdf|title=国際宇宙ステーション計画に関する宇宙機関長会議の結果について|publisher=JAXA|date=2006-03-08|accessdate=2019-01-17}}</ref><ref group="注釈">出典資料には、2007年5月に打ち上げ予定のATVの後にきぼうの1便目が明記されており、2009年の搭乗員6人体制確立の前にきぼうの最終便が明記されている。</ref>。これにより最後の太陽電池パネルよりも先に船内実験室が打ち上げられることになった<ref name="tokushuu spaceshuttle kibo 20111031"/>。 |
|||
この合意に基づき、「きぼう」初の打ち上げ要素となる船内保管室は、2008年3月11日に打ち上げられたスペースシャトル「[[スペースシャトル・エンデバー|エンデバー]]」でのミッション[[STS-123]]で宇宙に運ばれ、同月14日国際宇宙ステーションに取り付けられ、翌15日から運用が始まった(日付は全て[[日本時間]])<ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2008/04/20080402_sac_kibo.pdf|title=「きぼう」船内保管室打上げ・土井宇宙飛行士搭乗ミッションの結果について|publisher=JAXA|date=2008-04-02|accessdate=2019-01-17}}</ref>。 |
|||
続いて同年6月の[[スペースシャトル・ディスカバリー|ディスカバリー]]によるミッション[[STS-124]]で船内実験室及びロボットアームを設置し<ref name="kibo 1J kekka 080618">{{Cite web|和書|url=https://www.jaxa.jp/press/2008/06/20080618_sac_iss.pdf|title=「きぼう」船内実験室打上げ・星出宇宙飛行士搭乗ミッションの結果について|publisher=JAXA|date=2008-06-18|accessdate=2019-01-17}}</ref>、2009年7月に打ち上げられたエンデバーによる[[STS-127]]で、船外実験プラットフォームが取り付け・起動が完了した同[[7月19日]]11時23分に「きぼう」は完成した<ref name="kibo 2j/a kekka 090805">{{Cite web|和書|url=https://www.jaxa.jp/press/2009/08/20090805_sac_2ja.pdf|title=「きぼう」組立第3便ミッション(2J/A)の結果及び若田宇宙飛行士の長期滞在任務完了について|publisher=JAXA|date=2009-08-05|accessdate=2019-01-17}}</ref><ref name="kibo 2ja youyaku"/>。 |
|||
各種動作確認で機能にも問題がないことが確認され、本格的な運用を開始した<ref name="kibo 2j/a kekka 090805"/><ref name="kibo 1J kekka 080618"/>。2009年9月には、[[宇宙ステーション補給機]] (HTV) による実験装置と物資の輸送が始まった<ref name="jaxa htv">{{Cite web|和書|url=https://iss.jaxa.jp/htv/|title=宇宙ステーション補給機(HTV)|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2019-01-18}}</ref>。2010年2月24日の衛星間通信システム (ICS) の本格稼働<ref name="kibo weekly news no.376"/>、3月の子アームの設置をもって、基本要素の設置は終了した<ref name="kibo weekly news no.378">{{Cite web|和書|url=https://iss.jaxa.jp/weekly/100316.php|title=ISS・きぼうウィークリーニュース第378号|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2010-03-16|accessdate=2019-01-18}}</ref>。 |
|||
設置にあたって、船内実験室はスペースシャトルが打ち上げるISSモジュールの中でも最大 |
設置にあたって、船内実験室はスペースシャトルが打ち上げるISSモジュールの中でも最大であり<ref name="kibo iss gaiyou"/>、搭載空間の問題から打ち上げ時のスペースシャトルに[[センサ付き検査用延長ブーム]] (Orbiter Boom Sensor System:OBSS) を搭載できなかった<ref name="kibo 1ja eva5">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1ja/mission/eva/eva5.html|title=第5回船外活動:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-03-20|accessdate=2019-01-18}}</ref><ref name="kibo 1j youyaku">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1j/mission/summary/|title=1Jミッション:「きぼう」日本実験棟 ミッション結果の要約|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-06-19|accessdate=2019-01-18}}</ref>。このため、ひとつ前のフライトで船内保管室を輸送した際に、OBSSをISSに残して帰還し、次のフライトでこれを回収して使用することでスペースシャトルの熱防護システムの点検を行う苦肉の策が取られた<ref name="kibo 1ja eva5"/><ref name="kibo 1j youyaku"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1j/mission/eva/eva1/|title=1Jミッション:「きぼう」日本実験棟 1|第1回船外活動|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-05-30|accessdate=2019-01-18}}</ref>。また、打上げ時に船内実験室に搭載するラックも最小限とせざるを得ないため、システム機器用ラック(システムラック)のうち5台と実験ラック2台、保管ラック1台は事前に船内保管室でISSに輸送した<ref name="kibo 1j/a rack">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1ja/jlp/rack/|title=搭載ラック:1J/Aミッション|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2019-01-18}}</ref><ref name="kibo 1j rack">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1j/jpm/rack/|title=1J/ミッション:「きぼう」日本実験棟 搭載ラック|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-05-28|accessdate=2019-01-22}}</ref>。船内実験室とともに打ち上げられるシステムラックだけでは片系統のみのシステムしか起動できないが、船内保管室から上記ラックを移設することで、有人運用に必要な2系統のシステムを構築できるようにした<ref name="kibo faq iss 39"/>。 |
||
; 1J/Aミッション<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1ja/|title=1J/Aミッション - 「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-05-19|accessdate=2018-12-03}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1ja/mission/|title=ミッション概要:1J/Aミッション|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-03-17|accessdate=2019-01-18}}</ref> |
|||
; 1J/Aミッション |
|||
* ミッションナンバー:[[STS-123]]、打ち上げオービター「[[エンデバー |
* ミッションナンバー:[[STS-123]]、打ち上げオービター「[[スペースシャトル・エンデバー|エンデバー]]」 |
||
* 打ち上げ部位:船内保管室 |
* 打ち上げ部位:船内保管室 |
||
* 打ち上げ |
* 打ち上げ日時:[[2008年]](平成20年)[[3月11日]]15時28分(日本時間) |
||
* JAXA任務飛行士:[[土井隆雄]](保管室の取り付け及び室内の設定作業) |
* JAXA任務飛行士:[[土井隆雄]](保管室の取り付け及び室内の設定作業) |
||
* 1J/Aは日本と米国のISS機材を同時に運ぶミッションの1回目を表している。米国側機材は特殊目的ロボットアーム「[[カナダアーム2#デクスター|デクスター]]」。 |
* 1J/Aは日本と米国のISS機材を同時に運ぶミッションの1回目を表している。米国側機材は特殊目的ロボットアーム「[[カナダアーム2#デクスター|デクスター]]」。 |
||
* 船内保管室には実験ラックなどが積み込まれた状態で打ち上げられ、一時的に[[ハーモニー (ISS)|ハーモニー]]天頂側結合部に設置された。 |
* 船内保管室には実験ラックなどが積み込まれた状態で打ち上げられ、一時的に[[ハーモニー (ISS)|ハーモニー]]天頂側結合部に設置された。 |
||
; 1Jミッション<ref name="kibo 1j youyaku"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1j/|title=1Jミッション - 「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-08-05|accessdate=2018-12-03}}</ref> |
|||
; 1Jミッション |
|||
* ミッションナンバー:[[STS-124]]、打ち上げオービター「[[ディスカバリー |
* ミッションナンバー:[[STS-124]]、打ち上げオービター「[[スペースシャトル・ディスカバリー|ディスカバリー]]」 |
||
* 打ち上げ部位:船内実験室、ロボットアーム |
* 打ち上げ部位:船内実験室、ロボットアーム |
||
* 打ち上げ |
* 打ち上げ日時:2008年(平成20年)[[6月1日]]6時2分(日本時間) |
||
* JAXA任務飛行士:[[星出彰彦]](実験室の取り付け及び室内の設定作業) |
* JAXA任務飛行士:[[星出彰彦]](実験室の取り付け及び室内の設定作業) |
||
* 1Jは日本の機材のみを運ぶミッションの1回目を表す。 |
* 1Jは日本の機材のみを運ぶミッションの1回目を表す。 |
||
* 船内実験室をハーモニー左舷側に設置後、 |
* 船内実験室をハーモニー左舷側に設置後、船内実験室を起動し、ラックの搬入を行い、船内保管室を船内実験室天頂側に移設した。 |
||
; 2J/Aミッション<ref name="kibo 2ja youyaku">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/2ja/mission/summary/|title=2J/Aミッション:「きぼう」日本実験棟 ミッション結果の要約|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-08-12|accessdate=2019-01-18}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/2ja/|title=2J/Aミッション - 「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-11-11|accessdate=2018-12-03}}</ref> |
|||
; 2J/Aミッション |
|||
* ミッションナンバー:[[STS-127]]、打ち上げオービター「[[エンデバー |
* ミッションナンバー:[[STS-127]]、打ち上げオービター「[[スペースシャトル・エンデバー|エンデバー]]」 |
||
* 打ち上げ部位:船外実験プラットフォーム、船外パレット、衛星間通信システム |
* 打ち上げ部位:船外実験プラットフォーム、船外パレット、衛星間通信システム(ICS-EF) |
||
* 打ち上げ年月日 |
* 打ち上げ年月日:2009年(平成21年)7月16日7時3分(日本時間) |
||
* JAXA任務飛行士:[[若田光一]](2009年3月に[[STS-119]]で出発。第18/19/20次長期滞在クルーとしてISSに4ヶ月半滞在。打ち上げ各部位の船体取り付け及び設定作業。本任務終了後、[[STS-127]]にて帰還した。) |
* JAXA任務飛行士:[[若田光一]](2009年3月に[[STS-119]]で出発。第18/19/20次長期滞在クルーとしてISSに4ヶ月半滞在。打ち上げ各部位の船体取り付け及び設定作業。本任務終了後、[[STS-127]]にて帰還した。) |
||
* 日本と米国による2回目の打ち上げ。米国側ペイロードはISSの交換用のバッテリーと、その他の曝露機器の予備品 |
* 日本と米国による2回目の打ち上げ。米国側ペイロードはISSの交換用のバッテリーと、その他の曝露機器の予備品 |
||
* 船外パレットは回収した。 |
* 船外パレットは回収した。 |
||
<gallery> |
|||
<gallery widths="220px" heights="220px"> |
|||
ファイル:ISS after STS-123.jpg|1J/Aミッション後 |
ファイル:ISS after STS-123.jpg|1J/Aミッション後 |
||
ファイル:ISS after STS-124.jpg|1Jミッション後 |
ファイル:ISS after STS-124.jpg|1Jミッション後 |
||
| 67行目: | 147行目: | ||
== 船体 == |
== 船体 == |
||
「きぼう」は[[与圧|与圧部]]である船内実験室 (PM) と船内保管室 (ELM-PS)、曝露部の船外実験プラットフォーム (EF) と船外パレット (ELM-ES)、きぼう専用[[マニピュレーター]]のロボットアーム (JEM-RMS)、衛星間通信システム (ICS) といった6つの主要部位で構成されている。 |
「きぼう」は[[与圧|与圧部]]である船内実験室 (PM) と船内保管室 (ELM-PS)、曝露部の船外実験プラットフォーム (EF) と船外パレット (ELM-ES)、きぼう専用[[マニピュレーター]]のロボットアーム (JEM-RMS)、衛星間通信システム (ICS) といった6つの主要部位で構成されている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=2.1 「きぼう」の構成. JAXA|date=2008-04|accessdate=2018-11-30}}</ref>。すべてを結合した状態での、きぼうの全長は20.5m(ロボットアーム除く)、全高8.6m(船外実験プラットフォーム除く)、全幅8.9m(船外パレット、ICS-EF含む)、重さ約26トンであり<ref name="kibo handbook 3.1">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=3.1 各要素の主要諸元. JAXA|date=2008-04|accessdate=2018-11-30}}</ref>、国際宇宙ステーション(ISS)の中で最大の実験モジュールとなっている<ref name="kibo iss gaiyou">{{Cite web|和書|url=https://www.jaxa.jp/projects/iss_human/kibo/index_j.html|title=JAXA|「きぼう」日本実験棟/国際宇宙ステーション(ISS)|publisher=JAXA|accessdate=2018-12-15}}</ref>。 |
||
[[ファイル:JEM in November 2006.jpg|thumb|right| |
[[ファイル:JEM in November 2006.jpg|thumb|right|250px|船内実験室外観]] |
||
[[ファイル:Kibo PM interior.jpg|thumb|right| |
[[ファイル:Kibo PM interior.jpg|thumb|right|250px|入り口側から見た船内実験室内部。画面中央の円形部がエアロック、その右上と左上に窓があり、窓側の壁面は白いカバーで覆われている。照明が上の1面のみで、反対側の床面の両端に青い線が2本引かれている。(2008年6月)]] |
||
[[ファイル:Kjell Lindgren ISS Expedition 44 Flight Engineer.png|thumb|right|250px|船内実験室内部から見た入り口。(2015年9月)]] |
|||
[[ファイル:ISS-54 Mark Vande Hei with a sample in the Kibo lab.jpg|thumb|right|250px|ハーモニー側から見た船内実験室の入り口。入口の床に「Welcome to KIBO! Please enjoy and relax in this brand-new, the most spacious and quietest room in the ISS.」と書かれたシールが貼られている。(2017年12月)]] |
|||
[[ファイル:きぼう エアロック Kibo airlock.jpg|thumb|right|250px|エアロックの内側ハッチを開け内部で作業をしている[[若田光一]]宇宙飛行士。(2009年4月)]] |
|||
[[ファイル:ISS-53 Open airlock inside the Kibo module.jpg|thumb|right|250px|小型衛星放出のため、きぼうエアロックの外側ハッチを開放している様子。(2017年11月)]] |
|||
=== 船内実験室 (PM) === |
=== 船内実験室 (PM) === |
||
きぼうの中心となる部位。地上と同じ1気圧の空気が保たれ、飛行士は |
船内実験室 (Pressurized Module:PM)は、きぼうの中心となる部位<ref name="kibo no tsukuri"/>。地上と同じ1気圧の空気が保たれ、宇宙飛行士は普段着で過ごせ、最大4名が同時搭乗できる<ref name="kibo no tsukuri"/><ref name="kibo sennai jikkenshitsu"/>。主に[[無重量状態|微小重力]]環境を利用した実験を行う<ref name="kibo no tsukuri"/>。内部にはきぼう全体のシステムを管理・制御する装置のラックと実験設備が備えられた[[国際標準実験ラック]]の合わせて23個のラックを設置できるよう設計されており、そのうち10個は実験ラックを予定している<ref name="kibo sennai jikkenshitsu"/>。きぼうの主要システムは、ラックも含めてA系とB系の二重冗長構成になっている<ref name="kanai iss54/55 presskit"/>。船内実験室の四隅にはスタンドオフ部と呼ばれる各ラック間の隙間部分があり、ここに電力などの各種リソース供給のための配管・配線などが[[ハーモニー (ISS)|ハーモニー]]側に向けて艤装されている<ref name="jspacesystem kibo gaiyou">{{Cite web|和書|url=https://ssl.jspacesystems.or.jp/library/archives/jaros/space%20utilization%20view/h20_chapter2.pdf|title=第2章 「きぼう」日本実験棟プロジェクトの概要 独立行政法人 宇宙航空研究開発機構|publisher=一般財団法人[[宇宙システム開発利用推進機構]]|date=2008|accessdate=2019-01-04}}</ref>。ラックなどが運び入れられると、宇宙飛行士が活動できる空間は約2.2m四方となり<ref name="kibo handbook 4.1"/>、クルー支援系設備として各所に多数の足拘束具であるフット・レストレイント(Foot Restraint)とハンドレールが設置されている<ref name="kibo handbook 4.1">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.1 船内実験室. JAXA|date=2008-04|accessdate=2019-01-25}}</ref>。空気吹き出し口は照明と交互に10か所以上設けられており、空気吸い込み口は床側両端にある青線上に10か所以上設けられている<ref name="kibo sennai jikkenshitsu"/><ref name="jspacesystem kibo gaiyou"/>。 |
||
船内と船外実験プラットフォームとの間で実験装置や交換用の機器などの出し入れに使う円筒形の[[エアロック]]も装備されているが、寸法が小さいため[[宇宙服]]を着た人間の出入りはできない。室内側の上部に小窓のついているハッチは内側ハッチと呼ばれ小窓を通して中の様子を確認でき、宇宙空間側のハッチは外側ハッチと呼ばれ、安全のため2つのハッチが同時に開かない仕組みとなっている<ref name="kibo airlock kinou shiken">{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_07.html|title=「きぼう」日本実験棟のエアロック機能試験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=1999-08-31|accessdate=2018-12-21}}</ref>。内側ハッチは手動で開閉されるが外側ハッチは基本的に電動により開閉され、ボタンでハッチが自動的に開閉するオートモードと、1つ1つボタンを押しながら開閉手順を確認して開閉するマニュアルモードの2種類あり、電力供給がなくなるなどの緊急時には船内実験室側から手動で開閉できるようになっている<ref name="kibo airlock kinou shiken"/>。物資を搬出する際には、エアロック内の移動テーブルに取り付けて伸展させることにより出し入れ行う<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4-10. JAXA|date=2008-04|accessdate=2018-12-28}}</ref>。これらを使用して、地球観測、材料の実験や製造、生命科学(宇宙医学・バイオなど)、通信などの実験が行われる。このエアロックは、使用時にエアロック内の空気を船内に回収できる機能があり、3時間でエアロック内の空気の約8割を回収できる{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第5章 日本の宇宙実験システムJEM の技術開発 [Ⅰ] ―有人宇宙システム技術(与圧系)の開発と将来展望― 5-7}}>。 |
|||
船内実験室は船内保管室と共にほとんどが高張力[[アルミ合金]]を用いた溶接一体構造となっている。空気漏洩対策として貫通部の[[シール (工学)|シール]]全てが2重以上(与圧部間のOリングシールは3重<ref name="kibo CBM shiken"/><ref name="kibo kakutoku gijutsu 45p"/>)になされており、漏洩が起きてもシールを後から追加で取り付けられる構造となっていて、大きさが6インチ以上の漏洩時の影響が大きいシールは、測定孔が設けられ個別に漏洩確認ができるようになっている。筑波宇宙センターで行われた真空槽に入れての気密試験では、1年間に100リットル程度の漏洩量という試験結果が出ており、アメリカの実験棟より1桁少なく良好な結果を示している<ref name="pmaj 200803 yowa5">{{Cite web|和書|url=https://www.pmaj.or.jp/online/0803/message3.html|title=オンラインジャーナル2008年3月号/宇宙ステーション余話 第5回|publisher=日本プロジェクトマネジメント協会|date=2008-05|accessdate=2018-12-17}}</ref>。また、2004年1月に起きたアメリカ実験棟にある2重ガラス窓の曇り防止のために設けられている空気排出用のジャンパホースを宇宙飛行士が何回も掴んだことによる空気漏洩事故により、まだ打ち上げ前の「きぼう」は対策として白いカバーをジャンパホースごと窓のある壁面を覆っている<ref name="pmaj 200803 yowa5"/>。 |
|||
他モジュールとの接続部分である共通結合機構(Common Berthing Mechanism:CBM)は、国際宇宙ステーションの共通部品であるためアメリカ・[[ボーイング]]社が製造しており、船内実験室側のアクティブCBMに船内保管室側のパッシブCBMが接続しており、船内実験室側のパッシブCBMにハーモニー側のアクティブCBMが接続している。結露防止対策として外壁構造にヒーターが設けられていて、カビや微生物の繁殖を抑える塗装が施されている<ref name="kibo CBM shiken">{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_17.html|title=「きぼう」日本実験棟の共通結合機構機能試験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2000-08-17|accessdate=2019-01-04}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_02.html|title=「きぼう」日本実験棟フライトモデルの製造現場・インタビュー|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2002-10-31|accessdate=2019-01-04}}</ref>。 |
|||
窓はエアロックの左右に1つずつ合計2つあり<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1j/mission/eva/eva3/|title=1Jミッション:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-05-30|accessdate=2018-11-23}}</ref>、通常はシャッターで閉じられているが<ref>{{Cite web|和書|url=https://twitter.com/JAXA_JFLIGHT/status/1062262541265653760|title=JAXAきぼうフライトディレクタ (@JAXA_JFLIGHT)さん | Twitter|publisher=JAXA Twitter|date=2018-11-13|accessdate=2018-11-23}}</ref>、丸いハンドルを回すことで手動で開閉できる<ref>{{Cite web|和書|url=https://www.youtube.com/watch?v=J3bitV6Ml7Q|title=若田宇宙飛行士のISSツアー 前編|publisher=3:09-3:16にかけて. YouTube JAXA公式チャンネル|date=2014-06-08|accessdate=2018-12-18}}</ref>。当初、窓はロボットアームを操作する際、2人の内1人がディスプレイ越しに操作を行い、もう1人が肉眼でロボットアームの動きを見て補助をするのに用いるため設計に盛り込まれた。ところが、ロボットアームがディスプレイだけで操作ができるほど高性能だったため、必要性がなくなり開発費などの節減も含めて窓の削除が提起されたが、窓がない閉鎖空間で勤務する宇宙飛行士たちの心理的側面を考慮し窓の削除案は退けられている<ref name="koyamachuya rensai4">{{Cite web|和書|url=https://koyamachuya.com/column/adopt_criteria_of_astronaut/10793/|title=《第4回》宇宙飛行士の採用基準ー宇宙のオフィスの作り方|publisher=『[[宇宙兄弟]]』公式サイト [[小山宙哉]]/[[講談社]]|date=2016-03-23|accessdate=2018-12-14}}</ref>。また、[[キューポラ (ISS)|キューポラ]]が設置されるまでは地球を眺められる窓は「きぼう」や[[ズヴェズダ (ISS)|ズヴェズダ]]などしかなく<ref name="dspace 200805vol2"/>、よく宇宙飛行士が訪れていたという<ref name="koyamachuya rensai4"/>。 |
|||
壁面の色は、やや灰色がかった[[オフホワイト]]が採用されている。これは壁面の色を決めるにあたって、約100人の被験者を集めて「きぼう」の小型模型で実験を行い、また、様々な国籍・人種の宇宙飛行士にストレスを与える要因がなく、新機材などによる内部の変化に調和しやすい色が考慮された結果である<ref name="koyamachuya rensai4"/>。 |
|||
照明に関しては、当初は4面全てに照明を設ける予定であったが、実験を行ったところ4面全てが天井に見えてしまい不快感の惹起や宇宙酔いの原因にもなりうるなどの心理面による身体的悪影響が判明したため、照明は船内保管室が設けられている側の1面のみにし、その反対側の壁面には両端に青線を2本引き、目視で上下を判断できるようになされている<ref name="koyamachuya rensai4"/>。 |
|||
[[静粛性能|静粛性]]に関しては、他国のモジュールでは空調ファンや冷却水ポンプなどを原因とする騒音が酷く(防音・吸音・遮音材・サイレンサーなどの対策により現在はある程度改善している)、初期には宇宙飛行士が一時的な難聴になるほどだったのに対し、きぼうはISSの中で最も静かなモジュールで、ISSで定められている「一般の静かな事務所と同程度の水準」としている騒音基準を満たしているのは「きぼう」のみとなっている<ref name="koyamachuya rensai4"/><ref name="dspace 200805vol2">{{Cite web|和書|url=https://www.mitsubishielectric.co.jp/dspace/column/c0805_2.html|title=三菱電機 DSPACE/2008年5月コラムvol.2 野口飛行士、半年間の宇宙ぐらし決定。さて住み心地は?:林公代|publisher=[[三菱電機]]|date=2008-05|accessdate=2018-12-14}}</ref><ref name="pmaj 200806 yowa8">{{Cite web|和書|url=https://www.pmaj.or.jp/online/0806/message3.html|title=オンラインジャーナル2008年6月号/宇宙ステーション余話 第8回|publisher=日本プロジェクトマネジメント協会|date=2008-06|accessdate=2018-12-14}}</ref>。そのため他国の宇宙飛行士に人気があり、家族と交信する際などに「きぼう」がよく使われるという<ref>{{Cite web|和書|url=https://kids.gakken.co.jp/soratobi/news/1609/|title=ISSにいる大西宇宙飛行士(うちゅうひこうし)と地球の子どもたちを結ぶ、リアルタイム交信!|JAXA×YAC×学研キッズネット| 宇宙のとびら-net|学研キッズネット|publisher=[[Gakken|学研]]|date=2016-09|accessdate=2018-12-14}}</ref>。広くて静かなため、ISSが6人態勢になった時に2010年秋までアメリカ製の個室の寝室が設置されたこともある(現在はハーモニーに移されている)<ref name="pmaj 200806 yowa8"/><ref>{{Cite web|和書|url=https://fanfun.jaxa.jp/faq/detail/184.html|title=宇宙ではどうやって寝るのですか?|ファン!ファン!JAXA!|publisher=JAXA|date=2010-06|accessdate=2018-12-15}}</ref><ref>{{Cite web|和書|url=http://iss.jaxa.jp/iss_faq/life/life_004.html|title=宇宙ではどうやって寝るのですか:よくある質問|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-01-04|accessdate=2018-12-15}}</ref><ref name="yui iss taizai furoku1-6">{{Cite web|和書|url=https://iss.jaxa.jp/iss/jaxa_exp/yui/material/yui_presskit_b.pdf|title=油井宇宙飛行士 ISS長期滞在プレスキット|publisher=付録1-6. JAXA|date=2015-10-07|accessdate=2018-11-20}}</ref>。 |
|||
船内実験室の入り口側の壁には、JAXAの旗、[[日の丸]]、きぼう組み立て時や日本人宇宙飛行士が長期滞在した時のミッションの[[ワッペン]]と宇宙飛行士のサインがある<ref>{{Cite web|和書|url=https://www.youtube.com/watch?v=J3bitV6Ml7Q|title=若田宇宙飛行士のISSツアー 前編|publisher=12:16-13:43にかけて. YouTube JAXA公式チャンネル|date=2014-06-08|accessdate=2018-12-18}}</ref>。入口の床には、打ち上げ前に宇宙飛行士に宛てて「Welcome to KIBO! Please enjoy and relax in this brand-new, the most spacious and quietest room in the ISS.」と書かれた青いシールが貼られている<ref name="sed space expo2014"/>。船外実験プラットフォーム上の船外実験装置を撮影する曝露部視覚装置(船外カメラ)がエアロック側側面外縁部脇に窓と同じ高さに2台設置されており、これとは別に船内にも入口側とポート側のエアロック上部<ref name="kibo sennai jikkenshitsu amerika"/>{{sfn|JAXA『「きぼう」で獲得した有人宇宙技術』|loc=第7章 有人システム維持機能技術 ~電気・通信系技術 p.69}}に2台の視覚装置(カメラ)が設置されている<ref name="kibo sengai handbook 2.3.5">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/JFE_HDBK_all.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=2.3.5 船内・船外カメラ. JAXA|date=2010-09|accessdate=2019-01-04}}</ref><ref name="kibo sengai handbook ver1 2-8,3-10">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/participation/application/documents/ef02/handbook.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=初版 2-8及び3-10. JAXA|date=2006-10|accessdate=2019-01-04}}</ref>。 |
|||
また、船内実験室の外壁には日の丸と「JAPAN」の文字が入っており、多数の船外活動用手すりが外壁全周に配置されている<ref name="kibo handbook 4.1"/>。「こうのとり」近傍通信システム(Proximity Communication System:PROX、無線通信装置)の通信アンテナは、船内実験室の進行方向側側面外壁に設置されており、レーザー反射鏡である反射器(レーザーレーダーリフレクター)は船内実験室の地心側に設置されている<ref name="kounotori7 presskit furoku1-16,17">{{Cite web|和書|url=http://issstream.tksc.jaxa.jp/iss2/press/htv7_presskit_a.pdf|title=宇宙ステーション補給機「こうのとり」7 号機(HTV7)【ミッションプレスキット】|publisher=付録1-16及び付録1-17. JAXA|date=2018-09-05|accessdate=2019-01-04}}</ref>。船内実験室をISSに設置する際に用いるロボットアームの把持部であるグラプルフィクスチャーは、進行方向側側面に電力・通信インターフェース付グラプルフィクスチャー(Power and Data Grapple Fixture:PDGF)が、その反対側側面に軌道上取り外し可能型グラプルフィクスチャー(Flight Releasable Grapple Fixture:FRGF)が、それぞれ天頂面よりに1つずつ計2か所に設けられている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=3.1 各要素の主要諸元. JAXA|date=2008-04|accessdate=2019-01-04}}</ref><ref name="kibo sengai handbook 2.3.1"/>。スペースシャトルの貨物室に固定するためのトラニオンピンが右舷と左舷の両側面に1つずつ計4か所、キールピンが地心側中央部分に1か所あり、いずれも船内実験室がISSに設置された後に放熱を防ぐため断熱カバーで覆われている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1j/mission/eva/eva2/|title=1Jミッション 2|第2回船外活動:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-06-06|accessdate=2019-02-15}}</ref>。 |
|||
[[ファイル:ISS-52 Peggy Whitson and Jack Fischer work on station systems in the Kibo lab.jpg|thumb|right|250px|「EXPRESS Rack 4」で作業を行う[[ペギー・ウィットソン]]、ジャック・D・フィッシャー両宇宙飛行士。右隣はワークステーションラック。(2017年8月)]] |
|||
; 主要諸元<ref name="kibo sennai jikkenshitsu"/><ref name="kanai iss54/55 presskit"/><ref name="kibo handbook 4.1"/> |
|||
* 形状 - 円筒形 |
* 形状 - 円筒形 |
||
* 直径(外径) - 4.4m |
* 直径(外径) - 4.4m |
||
* 直径(内径) - 4.2m |
* 直径(内径) - 4.2m |
||
* 全長 - 11.2m |
* 全長 - 11.2m |
||
* 壁の厚さ - 約10cm(メテオロイド・デブリシールドとして、進行方向側以外の壁が外から順に、1.27mm厚の白いアルミ合金6061-T6のデブリバンパー、多層断熱材(Multi Layer Insulation:MLI)、アルミ合金2219-T87の与圧壁([[アイソグリッド構造]]で最薄4.8mm)で構成されている「[[フレッド・ホイップル|ホイップル]]バンパー」でできており、進行方向側150度分のみ「スタッフィング入りバンパー」(スタッフィングはバンパー側から順にMLI、アルミメッシュ、Nextel AF62([[セラミック]])、Kevlar 710([[炭素繊維強化炭素複合材料|炭素複合材]])、Kapton([[ポリイミド]])でできている)が設けられている。)<ref name="kibo yoatsuheki atsusa">{{Cite web|和書|url=https://fanfun.jaxa.jp/faq/detail/279.html|title=「きぼう」与圧壁の厚さはどのくらいですか?|publisher=JAXA|accessdate=2018-11-30}}</ref><ref name="kibo anzen sekkei">{{Cite web|和書|url=https://www.mext.go.jp/component/b_menu/shingi/giji/__icsFiles/afieldfile/2013/06/10/1335990_004_2.pdf|title=国際宇宙ステーションの日本の実験棟 (JEM)の安全設計について(報告)|publisher=JAXA|date=2013-06-10|accessdate=2018-11-30}}</ref><ref name="kibo bumper shiken">{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_09.html|title=「きぼう」日本実験棟船内実験室バンパ高速衝突試験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=19999-09-30|accessdate=2018-12-21}}</ref>。 |
|||
* 乾燥重量 - 15.9t |
|||
* 非貫通確率 - 10年間軌道上で運用した時、外壁に微小隕石やデブリによって貫通穴が生じない確率は、船内実験室と船内保管室を合わせて0.9738以上<ref name="pmaj 200802 yowa4"/>。 |
|||
* 搭乗員 - 通常2名、最大4名(時間制限あり)、居住設備は米国モジュールに依存 |
|||
* 質量 - 14.8t |
|||
* 搭乗員 - 通常2名、最大4名(時間制限あり)、居住設備は米国モジュールに依存<ref name="kibo mitsubishi seihin"/> |
|||
* 搭載ラック - 総数23台 |
* 搭載ラック - 総数23台 |
||
** システム機器用ラック - 11台 |
** システム機器用ラック - 11台 |
||
*** 電力ラック(Electrical Power System:EPS) - 分電盤や分電箱が搭載されているラックで、ISSの太陽電池パドル(Solar Array Wing:SAW)で発電した電気(直流120V×2系統)を、きぼうの各機器に分配する役割を持っており、2台設置し冗長構成にしている。 |
|||
*** 電力ラック - 2台設置し冗長構成にしている |
|||
*** 情報管制ラック(Data Management System:DMS) - きぼうのメインコンピューター「きぼう制御装置」(JEM Control Processor:JCP)と実験装置用の中速データ伝送装置などが搭載されているラックで、2台設置し冗長構成にしており、片方が故障しても自動的に残りの1台に切り替わる。 |
|||
*** 情報管制ラック - 2台設置し冗長構成にしている |
|||
*** 空調/熱制御ラック(ECLSS/TCS Rack:Environmental Control and Life Support System(イークレス)/Thermal Control System Rack) - きぼう内の温度、湿度、気圧の調整、空気の循環・浄化、各ラックに冷却水の供給を行うラックで、ECLSS/TCS1(LTL(Low Temperature Loop))とECLSS/TCS2(MTL(Medium Temperature Loop))の2台設置し冗長構成にしている。 |
|||
*** 空調/熱制御ラック - 2台設置し冗長構成にしている |
|||
*** ロボットアーム制御ラック - ロボットアーム操作卓を収めたラック |
*** ロボットアーム制御ラック - 船内実験室へ最初に設置された、きぼうロボットアーム(JEM Remote Manipulator System:JEMRMS)のロボットアーム操作卓を収めたラック。 |
||
*** ワークステーションラック(Work Station Rack) - 画像データ等の切替機器、音声通信端末装置(Audio Terminal Unit:ATU)<ref>{{Cite web|和書|url=http://iss.jaxa.jp/iss_faq/iss/iss_025.html|title=音声端末装置(ATU)はどんな機能があるのですか:よくある質問|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2010-08-17|accessdate=2018-12-16}}</ref>、テレビモニター2台(1台のみ設置)、警告・警報パネル(Caution and Warning Panel:C&W Panel)などが収められているラック。 |
|||
*** ワークステーションラック - 音声端末装置、TVモニタ、警告・警報パネルなどを装備したラック |
|||
*** 衛星間通信システムラック - 衛星間通信システム機器とHTV用のPROX装置を搭載したラック |
*** 衛星間通信システムラック(ICS/PROX:Inter-orbit Communication System/Proximity Communication System) - 衛星間通信システム機器とHTV用のPROX装置を搭載したラック。 |
||
*** 保管ラック - 2台 |
*** 保管ラック(JEM Resupply Stowage Rack:JRSR) - 2台 |
||
** 実験ラック - 10台(予定 |
** 実験ラック - 10台(予定)(2017年12月26日時点で、JAXA 5台、NASA 2台、冷凍・冷蔵庫ラック 2台を設置<ref name="kanai iss54/55 presskit"/>) |
||
*** 各ラックの位置<ref name="kibo jikken souchi"/><ref name="kibo sennai jikkenshitsu">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/kibo/jpm/|title=船内実験室:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-08-19|accessdate=2018-11-30}}</ref><ref name="kanai iss54/55 presskit">{{Cite web|和書|url=https://iss.jaxa.jp/iss/jaxa_exp/kanai/material/kanai_press-kit_01_1226.pdf|title=金井宇宙飛行士 ISS長期滞在プレスキット|publisher=付録2 「きぼう」日本実験棟概要. JAXA|date=2017-12-26|accessdate=2018-11-29}}</ref> |
|||
:::: きぼう船内実験室の入り口から向かって左側手前(後方:After)から |
|||
::::: 「JPM1A1」 - NASAの冷凍・冷蔵庫のMELFI-2 |
|||
::::: 「JPM1A2」 - 細胞実験ラック |
|||
::::: 「JPM1A3」 - 流体実験ラック |
|||
::::: 「JPM1A4」 - 多目的実験ラック(MSPR) |
|||
::::: 「JPM1A5」 - 保管ラック(Zero-g StowageRack:ZSR) |
|||
::::: 「JPM1A6」 - きぼうロボットアーム制御ラック(JEM Remote Manipulator System:JEMRMS) |
|||
:::: 反対の右側手前(進行方向:Forward)から |
|||
::::: 「JPM1F1」 - NASAの米国実験ラック(EXPRESS(Expedite the Processing of Experiment to the Space Station) Rack 5) |
|||
::::: 「JPM1F2」 - 多目的実験ラック2(MSPR-2) |
|||
::::: 「JPM1F3」 - 勾配炉実験ラック |
|||
::::: 「JPM1F4」 - ワークステーションラック |
|||
::::: 「JPM1F5」 - NASAの米国実験ラック(EXPRESS Rack 4) |
|||
::::: 「JPM1F6」 - NASAの保管ラック(ZSR) |
|||
:::: 入り口から向かって床側手前(床:Deck)から |
|||
::::: 「JPM1D1」 - 空調・熱制御用のECLSS/TCS1(LTL)ラック |
|||
::::: 「JPM1D2」 - 電力ラック1(EPS1) |
|||
::::: 「JPM1D3」 - 保管空間 |
|||
::::: 「JPM1D4」 - NASAとJAXAの冷凍・冷蔵庫のMELFI-1 |
|||
::::: 「JPM1D5」 - 電力ラック2(EPS2) |
|||
::::: 「JPM1D6」 - 空調・熱制御用のECLSS/TCS2(MTL) ラック |
|||
:::: 反対の天井側手前(天井:Overhead)から |
|||
::::: 「JPM1O1」 - 情報管制ラックのDMS2、可搬式酸素マスクのPBA(Portable Breathing Apparatus)と消火器のPFE(Portable Fire Extinguisher) |
|||
::::: 「JPM1O2」 - システム保管ラック1(JRSR-2) |
|||
::::: 「JPM1O3」 - ユーザー保管ラック1(JRSR-1) |
|||
::::: 「JPM1O4」 - 衛星間通信システムラックのICS/PROX |
|||
::::: 「JPM1O5」 - 情報管制ラックのDMS1、更にその奥に可搬式酸素マスクのPBAと消火器のPFEが設置されている。 |
|||
* 電力 - 直流120V・最大24kW |
* 電力 - 直流120V・最大24kW |
||
* 通信制御 - 32ビット計算機システム、高速データ伝送最大100Mbps |
* 通信制御 - 32ビット計算機システム、高速データ伝送最大100Mbps |
||
* 環境制御性能 - 温度:18. |
* 環境制御性能 - 温度:18.3-26.7度、湿度:25-70% |
||
* 寿命 - 10年以上 |
* 寿命 - 10年以上 |
||
; エアロック主要諸元<ref name="kibo handbook 4.1"/> |
|||
[[ファイル:Kibo ELM-PS module in April 2007.jpg|thumb|right|200px|船内保管室]] |
|||
* 外径 - 船外実験プラットフォーム側1.7m、船内実験室側1.4m |
|||
* 長さ - 2.0m |
|||
* 耐圧性能 - 約1,047hPa |
|||
* 通過可能荷物寸法 - 約0.64m×0.83m×0.80m |
|||
* 通過可能荷物重量 - 300kg |
|||
* 消費電力 - 600W以下 |
|||
[[ファイル:Kibo ELM-PS module in April 2007.jpg|thumb|right|250px|船内保管室]] |
|||
[[ファイル:Kibo ELM-PS on ISS.jpg|thumb|right|250px|ハーモニーに仮設置されている船内保管室(2008年3月)]] |
|||
=== 船内保管室 (ELM-PS) === |
=== 船内保管室 (ELM-PS) === |
||
軌道上で保管庫として使用される部位 |
船内保管室 (Experiment Logistics Module Pressurized Section:ELM-PS)は、軌道上で保管庫として使用される部位で、日本が打ち上げた初の有人施設となった<ref name="kibo sennai hokanshitsu">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/kibo/jlp/|title=船内保管室:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-09-12|accessdate=2018-11-30}}</ref>。2011年2月に[[多目的補給モジュール]]「レオナルド」を[[恒久型多目的モジュール]]に改造してISSに設置されるまで、ISSの実験モジュールの中で唯一の専用保管室であった<ref name="kanai iss54/55 presskit"/>。実験室同様に1気圧が保たれ、8台のラックを搭載できる<ref name="kibo sennai hokanshitsu"/>。打ち上げ時に搭載していたラックは船内実験室打ち上げ後に移設され、その後は保管空間として実験機器、実験試料、ISSの各部品などの保管<ref>{{Cite web|和書|url=https://www.youtube.com/watch?v=J3bitV6Ml7Q|title=若田宇宙飛行士のISSツアー 前編|publisher=7:36-7:45にかけて. YouTube JAXA公式チャンネル|date=2014-06-08|accessdate=2018-12-18}}</ref>に使われている<ref name="kibo sennai hokanshitsu"/>。 |
||
天頂面の一部が斜めに切られたような形状になっているが、ここには船外実験プラットフォームと同じ実験装置交換などに使う船内保管室装置交換機構(EFU)が1基設置されている<ref name="kibo kakutoku gijutsu 45p">{{harvnb|JAXA『「きぼう」で獲得した有人宇宙技術』|loc=第5章 有人システム維持機能技術~構造・機構系技術 p.45}}</ref><ref name="kibo handbook 4.2"/>。これはHTV到着時に、後述の船外パレットをここに仮置きして、HTVの曝露パレットを取り付ける場所を空けるために使用する計画であったが、その後船外パレットは地上に回収することになったため、このような使い方は必要なくなった<ref name="kibo handbook 4.2">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.2 船内保管室. JAXA|date=2008-04|accessdate=2018-11-30}}</ref>。その後、2018年7月13日にHREP(後述のアメリカの船外実験装置)をドラゴン宇宙船15号機に回収するにあたって、一時的に船内保管室の装置交換機構(EFU)に移されており、カナダアーム2との受け渡し場所として使われるなどしている<ref name="jaxa archives HREP"/>。また、この天頂面には「こうのとり」近傍通信システム(PROX)の[[GPS]]アンテナ2基が設置されている<ref name="kounotori7 presskit furoku1-16,17"/>。 |
|||
当初計画では、 |
当初の計画では、船内保管室はスペースシャトルを使って物資の運搬と回収を行う輸送用コンテナとして用いる予定であったが、スペースシャトルの退役により取りやめになり、代わりに輸送についてはHTVがその役割を担うことになった{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第5章 日本の宇宙実験システムJEM の技術開発 [Ⅰ] ―有人宇宙システム技術(与圧系)の開発と将来展望― 5-7}}。地上へは持ち帰らない方針になったため、スペースシャトルへの積み込みに必要な部品の一部(EFUの下部、進行方向の反対側側面にあった把持部である軌道上取り外し可能型グラプルフィクスチャー(Flight Releasable Grapple Fixture:FRGF)<ref name="kibo sengai handbook 2.3.1"/><ref>[https://iss.jaxa.jp/en/kibo/about/kibo/jlp/ “ELM Pressurized Section:About Kibo”]. JAXA (2008年8月29日). 2019年2月26日閲覧。</ref>など)は船内保管室から取り外された。 |
||
静粛性も優れており、きぼう船内実験室も静かだが、実験装置のない船内保管室は特に静かだという<ref name="dspace 200805vol2"/>。壁には船内実験室と同様に打ち上げ前に宇宙飛行士に宛てて「Welcome to the highest place of Japan over Mt.Fuji」(日本の[[富士山]]より高い場所にようこそ)と書かれた青いシールが貼られている<ref name="sed space expo2014"/><ref>{{Cite web|和書|url=https://www.youtube.com/watch?v=J3bitV6Ml7Q|title=若田宇宙飛行士のISSツアー 前編|publisher=7:54-8:00にかけて. YouTube JAXA公式チャンネル|date=2014-06-08|accessdate=2018-12-18}}</ref>。 |
|||
; 主要諸元<ref name="kibo sennai hokanshitsu"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.2 船内保管室. JAXA|date=2008-04|accessdate=2019-01-25}}</ref> |
|||
* 形状 - 円筒形 |
* 形状 - 円筒形 |
||
* 直径(外径) - 4.4m |
* 直径(外径) - 4.4m |
||
* 直径(内径) - 4.2m |
* 直径(内径) - 4.2m |
||
* 全長 - 4.2m |
* 全長 - 4.2m |
||
* 壁の厚さ - 約10cm(メテオロイド・デブリシールドとして、進行方向側以外の壁が外から順に、1.27mm厚の白いアルミ合金6061-T6のデブリバンパー、多層断熱材(Multi Layer Insulation:MLI)、アルミ合金2219-T87の与圧壁(アイソグリッド構造で最薄4.8mm)で構成されている「ホイップルバンパー」でできており、進行方向側223度分のみ「スタッフィング入りバンパー」(スタッフィングはバンパー側から順にMLI、アルミメッシュ、Nextel AF62(セラミック)、Kevlar 710(炭素複合材)、Kapton(ポリイミド)でできている)が設けられている。)<ref name="kibo yoatsuheki atsusa"/><ref name="kibo anzen sekkei"/><ref name="kibo bumper shiken"/> |
|||
* 非貫通確率 - 10年間軌道上で運用した時、外壁に微小隕石やデブリによって貫通穴が生じない確率は、船内実験室と船内保管室を合わせて0.9738以上<ref name="pmaj 200802 yowa4"/>。 |
|||
* 乾燥重量 - 4.2t(打ち上げ時8.4t) |
* 乾燥重量 - 4.2t(打ち上げ時8.4t) |
||
* 搭載ラック - 8台 |
* 搭載ラック - 8台 |
||
* 電力 - 直流120V・最大3kW |
* 電力 - 直流120V・最大3kW |
||
* 環境制御性能 - 温度:18.3-29.4度、湿度:25-70% |
|||
* 寿命 - 10年以上 |
* 寿命 - 10年以上 |
||
[[ファイル:Kibo EF in TKSC-01.jpg|thumb|right| |
[[ファイル:Kibo EF in TKSC-01.jpg|thumb|right|250px|船外実験プラットフォーム]] |
||
[[ファイル:STS-127 JEM-EF.jpg|thumb|right|250px|[[カナダアーム]]により船内実験室に接続される船外実験プラットフォーム(2009年7月)]] |
|||
=== 船外実験プラットフォーム (EF) === |
=== 船外実験プラットフォーム (EF) === |
||
船外実験プラットフォーム (Exposed Facility:EF)は、微小重力・高真空の宇宙曝露環境を利用して、科学観測、天体観測、地球観測、通信、理工学実験、材料曝露実験などを行う多目的実験空間を提供する装置<ref name="kibo handbook 4.3">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.3 船外実験プラットフォーム. JAXA|date=2008-04|accessdate=2019-01-25}}</ref>。船外実験装置や衛星間通信装置を取り付けるための能動的な結合部である船外実験プラットフォーム側装置交換機構(Exposed Facility Unit:EFU)<ref>{{Cite web|和書|url=https://iss.jaxa.jp/astro/report/2009/0902/htv.html|title=宇宙ステーション補給機(HTV)、「きぼう」日本実験棟訓練|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-03-25|accessdate=2018-12-26}}</ref>が設けられており、これに実験装置側にある受動的なペイロード側装置交換機構(Payload Interface Unit:PIU)<ref name="kibo sengai handbook ver1 2-7to2-10">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/participation/application/documents/ef02/handbook.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=初版 2-7から2-10. JAXA|date=2006-10|accessdate=2018-12-26}}</ref>が接続を行い、両者を含む一連の仕組みを船外実験プラットフォーム装置交換機構(Equipment Exchange Unit:EEU)と呼ばれている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.3 船外実験プラットフォーム. JAXA|date=2008-04|accessdate=2018-11-30}}</ref>。船外実験プラットフォーム側装置交換機構(EFU)は船内実験室から見て右端側面にEFU#1・EFU#3・EFU#5・EFU#7の4か所、左端側面にEFU#2・EFU#4・EFU#6・EFU#8の4か所、前端側面にEFU#9・EFU#10の2か所、上面前端付近にEFU#11・EFU#12の2か所の計12か所あり<ref name="kibo sengai handbook ver1 2-7to2-10"/>、この結合部に各実験装置を取り付けることで様々な実験が行える<ref name="kibo handbook 4.3"/>。実験装置は、基本的に標準ペイロードと呼ばれる[[きぼう#JEM曝露部搭載型共通バス機器部(APBUS)|JEM曝露部搭載型共通バス機器部]](APBUS)に搭載された上で各EFUに設置され、APBUSの大きさは0.8m×1.0m×1.85mで、最大で重さ500kgまで搭載可能となっている<ref name="kibo sengai jikkensouchi"/><ref name="kibo-ef jasma 2011"/>。EFU#2とEFU#9は2.5トンまでの実験装置を設置可能なため、より大きな寸法の実験装置が容認される可能性はある<ref name="kibo-ef jasma 2011"/>。 |
|||
微小重力・高真空の宇宙曝露環境を利用して、科学観測、天体観測、地球観測、通信、理工学実験、材料曝露実験などを行う多目的実験スペース。船外実験装置や衛星間通信装置を取り付けるための12箇所の結合部があり、ここに各実験装置を取り付けることで様々な実験が行える。なお、曝露実験装置の設置場所は米、露、欧州も有しているが、排熱用の冷却能力まで提供可能なのは「きぼう」の船外実験プラットフォームだけである。 |
|||
曝露実験装置の設置場所は米、露、欧州も有しているが、電力・通信(MIL-1553Bによる低速系のバスライン)のみの供給に留まり、これらに加えて中速系のイーサネットと光ファイバーによる高速系の光通信や能動的な熱制御能力(排熱・冷却)まで提供可能なのは「きぼう」の船外実験プラットフォームだけである<ref name="kibo-ef jasma 2011">[http://www.jasma.info/journal/wp-content/uploads/past/assets/images/jornal/28-1/28-1/2011_p018.pdf “日本マイクログラビティ応用学会誌 Vol.28 No.1 2011 特集2:JEM「きぼう」船外実験プラットフォームを利用した科学(解説) 「きぼう」船外実験プラットフォーム利用の概要”]. 日本マイクログラビティ応用学会 (2011年1月19日). 2019年2月25日閲覧。</ref><ref>[https://www.isas.jaxa.jp/j/column/kibou/10.shtml “ISAS|第10回:「きぼう」完成!船外実験プラットフォーム利用、開始!! /きぼうの科学”]. JAXA (2009年7月). 2019年2月26日閲覧。</ref>。受動的な船外実験プラットフォーム結合機構(Exposed Facility Berthing Mechanism:EFBM)が設置されており、きぼう船内実験室側の能動的なEFBMと結合している<ref name="kibo sennai jikkenshitsu"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.3.3 構成要素. JAXA|date=2008-04|accessdate=2018-11-30}}</ref>。ロボットアームが掴む把持部であるグラプルフィクスチャー(Grapple Fixture)は上面中央両端に1つずつ計2か所あり、子アーム保管装置は上面手前右にある<ref name="ihi gihou 49-3 kibo bakurobu"/><ref name="kibo handbook 4-17to4-23"/><ref name="kibo sengai jikken platform">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/kibo/jef/|title=船外実験プラットフォーム:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-07-16|accessdate=2018-12-27}}</ref>。 |
|||
船外実験プラットフォームの構造は、内部は「Spar」と呼ばれる格子状のアルミ合金製フレームに「Bulkhead」と呼ばれる板状のアルミ合金製フレームが組み合わさってできており、それらのフレームの周囲を上面が「Upper Panel」、下面が「Lower Panel」、手前側面が「Forward Panel」、前方側面が「Aft Panel」、両端側面が「Side Panel」のアルミ合金製パネルで覆われ、その四隅と下面前端の計5か所に、スペースシャトルの貨物室に固定するための「トラニオン(Trunnion)」または「STS取付構造(STS(Space Transportation System) mounting structure)」<ref group="注釈">STS(Space Transportation System)とはNASAの宇宙輸送システムのことで、再使用可能な有人宇宙船として構想され、後に[[スペースシャトル計画]]となった。</ref>と呼ばれる、棒状の「Support Leg Assembly-Keel」とキール結合部の「Scuff Palate」で構成された3点支持架があり、その内前方両端2か所のトラニオンには照明、雲台、カメラで構成された曝露部視覚装置Visual Equipment:VE)が搭載されている<ref name="kibo sengai handbook ver1 2-8,3-10"/><ref name="ihi gihou 49-3 kibo bakurobu">{{Cite web|和書|url=https://www.ihi.co.jp/var/ezwebin_site/storage/original/application/5d15ca2339018eb3916485bac8425712.pdf|title=IHI技報 第49巻 第3号(平成21年12月発行)-宇宙開発特集号- 国際宇宙ステーション日本実験モジュール曝露部システムと運用|publisher=[[IHI]]|date=2009-12|accessdate=2018-12-27}}</ref><ref name="kibo handbook 4-17to4-23">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4-17から4-23. JAXA|date=2008-04|accessdate=2018-12-27}}</ref><ref name="ihi engineering review 43-1 kibo ef"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/JFE_HDBK_all.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=2.3 船外実験プラットフォーム以外の軌道上サービス 2-42から2-50. JAXA|date=2010-09|accessdate=2018-12-27}}</ref>。 |
|||
船外実験プラットフォームの内部機器は、円滑な運用が行えるよう故障時に交換ができる軌道上交換ユニット(Orbital Replacement Unit:ORU)化されており、ORUは上面に8個設けられているロボットアームで交換が行えるロボティクス対応軌道上交換ユニット(Robot essential ORU:R-ORU)と、下面に4個設けられている宇宙飛行士が船外活動で交換を行う船外活動対応軌道上交換ユニット(Extravehicular activity ORU:E-ORU)の2種類ある<ref name="ihi gihou 49-3 kibo bakurobu"/><ref name="kibo handbook 4-17to4-23"/>。 |
|||
R-ORU化されているのは、曝露部電力分配箱(Exposed Facility-Power Distribution Box:EF-PDB)、サバイバル電力分配箱(Survival Power Distribution Box:SPB)、曝露部制御装置(Exposed Facility System Controller:ESC)、ビデオスイッチャー(Video Switcher:VSW)、ポンプパッケージ(Fluid Pump Package:FPP)の5種類で、E-ORU化されているのは、熱制御系インターフェースユニット( TCS( Thermal Control System) Interface Unit:TIU)、ヒーター制御装置-a(Heater Control Equipment-a:HCE-a)、ヒーター制御装置-b(Heater Control Equipment-b:HCE-b)、船外実験プラットフォーム装置交換機構(EEU)ドライバーユニット(EEU Driver Unit:EDU-a/b)の4種類となっている<ref name="ihi gihou 49-3 kibo bakurobu"/><ref name="ihi engineering review 43-1 kibo ef">{{Cite web|和書|url=https://www.ihi.co.jp/var/ezwebin_site/storage/original/application/0bd7727040ad2f6179dd09ec1390775f.pdf|title=IHI Engineering Review Vol.43 No.1 2010 JEM Exposed Facility System and Operation|publisher=[[IHI]]|date=2010|accessdate=2019-01-15}}</ref>。 |
|||
* 各EFUの接続機器の内訳(実験に使えるのはEFU#7、EFU#10、EFU#12を除く残りの9か所で、実験装置の重量はEFU#2、EFU#9が2.5トン以内で他の所は500kg以内となっている)<ref name="kibo sengai jikkensouchi">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/|title=船外実験装置:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2018-12-28}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/JFE_HDBK_all.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=2.2 きぼう船外実験プラットフォームが提供するサービス 2-36から2-41. JAXA|date=2010-09|accessdate=2018-12-28}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/participation/application/documents/ef02/handbook.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=初版 2-2及び2-10. JAXA|date=2006-10|accessdate=2018-12-28}}</ref> |
|||
EF先端(後方側)の結合部は、スペースシャトルで船外機器を輸送した「船外パレット」と、HTVで船外機器を輸送するための「曝露パレット」を取り付けるのに使われる。 |
|||
:: EFU#1に全天X線監視装置(MAXI) |
|||
:: EFU#2(大型重量用2.5トン以下)にアイスクリーム(ISS-CREAM)<ref name="jaxa dragon-spx12 iss-cream"/> |
|||
:: EFU#3は未設置<ref name="jaxa archives HREP"/>(以前は超伝導サブミリ波リム放射サウンダ(SMILES)が設置されていて<ref name="htv-5 presskit 5-16"/>、その後キャッツ(CATS)が設置されていた<ref name="kibo sengai cats spaceref"/>。) |
|||
:: EFU#4にナノラックス船外プラットフォーム(NREP)<ref name="kibo NREP"/> |
|||
:: EFU#5に中型曝露実験アダプター(i-SEEP)<ref name="kibo i-seep riyou boshuu2">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/181205_iseep_rfp.html|title=「きぼう」船外利用にかかる民間事業者の企画提案募集について ~「きぼう」利用事業の民間開放 第2弾~:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2012-12-05|accessdate=2018-12-28}}</ref> |
|||
:: EFU#6にジェダイ(Global Ecosystem Dynamics Investigation:GEDI、アメリカの地球観測用レーザー<ref name="kibo yotei 181219"/><ref name="GEDI instrument"/>。以前は沿岸海域用ハイパースペクトル画像装置および大気圏/電離圏リモート探知システム実験装置(HREP)<ref name="kibo hrep"/>が設置されていたが、2018年7月に撤去されている<ref name="jaxa archives HREP"/>。) |
|||
:: EFU#7に衛星間通信システム曝露系サブシステム(ICS-EF)<ref name="kibo sengai handbook ver1 2-8"/>(EFU#7の不具合時はEFU#5を優先使用) |
|||
:: EFU#8にキャッツ(CATS<ref name="kibo sengai cats spaceref"/>、以前はポート共有実験装置(MCE)が設置されていた<ref name="htv-5 presskit 5-16"/><ref name="kibo mce"/>。) |
|||
:: EFU#9(大型用2.5トン以下)に高エネルギー電子・ガンマ線観測装置(CALET) |
|||
:: EFU#10にエコストレス(ECOSTRESS<ref name="jpl ecostress 180706"/>、本来はHTVの曝露パレットが設置される場所で普段は空いているが、エコストレスが設置された2018年7月の時点で、9号機までとなっている打ち上げ予定のHTV7-9号機の曝露パレットはISS用新型リチウムイオンバッテリーを搭載するため<ref>{{Cite web|和書|url=http://issstream.tksc.jaxa.jp/iss2/press/htv7_presskit_b.pdf|title=宇宙ステーション補給機「こうのとり」7 号機(HTV7)【ミッションプレスキット】|publisher=1-1及び5-17. JAXA|date=2018-11-02|accessdate=2019-01-11}}</ref>、実験機器設置のためEFU#10を使う予定はない。かつては船外パレットの使用箇所でもあったが後述の通り1回のみの使用で終わった。EFU#10の不具合時はEFU#9を優先使用。) |
|||
:: EFU#11は未設置(以前は宇宙環境計測ミッション装置 (SEDA-AP)がEFU#9からここに移設されていたが2018年12月21日に廃棄されている<ref name="kibo seda-ap haiki"/>。) |
|||
:: EFU#12は実験装置交換時の仮置場(普段は使用不可) |
|||
; 主要諸元<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/JFE_HDBK_all.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=1.1 きぼう船外実験プラットフォームとは. JAXA|date=2010-09|accessdate=2018-11-30}}</ref><ref>{{Cite web|和書|url=http://iss.jaxa.jp/glossary/jp/se/ef.html|title=船外実験プラットフォーム:ISS関連用語集|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2018-11-30}}</ref> |
|||
* 形状 - 箱形 |
* 形状 - 箱形 |
||
* 幅 - 5.0m |
* 幅 - 5.0m |
||
* 長さ - 5.2m(EFBMと前端EFUまでの長さ、トラニオン上の曝露部視覚装置を含めると5.6m)<ref name="kibo handbook 4-17to4-23"/> |
|||
* 長さ - 5.2m |
|||
* 高さ - 3.8m(曝露部視覚装置を含めると4.0m)<ref name="kibo handbook 4-17to4-23"/> |
|||
* 高さ - 3.8m |
|||
* 質量 - 4.1t |
* 質量 - 4.1t |
||
* 実験装置取付け場所 - 12箇所 |
* 実験装置取付け場所 - 12箇所 |
||
| 132行目: | 301行目: | ||
** システム機器用 - 最大1kW |
** システム機器用 - 最大1kW |
||
** 実験装置用 - 最大10kW |
** 実験装置用 - 最大10kW |
||
** 個別の実験装置 - 最大3kW |
|||
* 通信制御 - 16ビット計算機システム、データ伝送速度:最大100Mbps |
* 通信制御 - 16ビット計算機システム、データ伝送速度:最大100Mbps |
||
* 環境制御性能 - なし |
* 環境制御性能 - なし |
||
* 寿命 - 10年以上 |
* 寿命 - 10年以上 |
||
[[ファイル:Kibo ELM-ES in TKSC-01.jpg|thumb|right| |
[[ファイル:Kibo ELM-ES in TKSC-01.jpg|thumb|right|250px|船外パレット]] |
||
[[ファイル:Iss020e023358.jpg|thumb|right|250px|船外実験プラットフォーム(手前)に接続された船外パレット(奥)、実験機器を3台搭載しているのが見える。船外活動しているのはクリストファー・カシディ宇宙飛行士。(2009年7月)]] |
|||
=== 船外パレット (ELM-ES) === |
=== 船外パレット (ELM-ES) === |
||
船外実験プラットフォームに取り付ける船外機器を3基取り付けて、スペースシャトルで輸送するためのパレット |
船外パレット (Experiment Logistics Module Exposed Section:ELM-ES)は、船外実験プラットフォームに取り付ける船外機器を船外実験装置取付け機構(Payload Attach Mechanism:PAM)に3基取り付けて、スペースシャトルで輸送するためのパレット<ref name="sengai pallet">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/kibo/jle/|title=船外パレット:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-12-19|accessdate=2018-11-30}}</ref>。装置交換機構(PIU)により、船外実験プラットフォーム側の |
||
EFU#10に一時的に設置される<ref name="kibo sengai handbook ver1 2-7to2-10"/>。船外パレットの構造は格子状のパネルとフレームが組み合わさってできており、最大500kgの船外実験機器を3個搭載できる<ref name="webarchive sengai pallet bakuroku">{{Cite web|和書|url=http://iss.jaxa.jp/iss/kibo/h_bakuroku.html|title=「きぼう」日本実験棟の構成 -船外パレット-|url-status=dead|url-status-date=2003-08-26|archiveurl=https://web.archive.org/web/20070704193317/http://iss.jaxa.jp/iss/kibo/h_bakuroku.html|archivedate=2007-07-04|accessdate=2019-02-15}}</ref>。トラニオンは両側面に2か所ずつと先が細くなってる前端部分に1か所の計5か所にある<ref>{{Cite web|和書|url=http://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.4 船外パレット 4-24から4-28. JAXA|date=2008-04|accessdate=2018-12-28}}</ref>。保温のため船外パレット全体が多層断熱材(MLI)で覆われている<ref name="webarchive sengai pallet bakuroku"/>。 |
|||
船内保管室と同様に、シャトルによる複数回の打ち上げを想定して設計され、機器の地上への回収も可能なように設計されたが<ref name="sengai pallet"/>、開発期間中は具体的な回収計画は決まっていなかった<ref name="kibo kakutoku gijutsu 160-166p">{{harvnb|JAXA『「きぼう」で獲得した有人宇宙技術』|loc=第16章 「きぼう」曝露系システムの開発成果 ~船外パレット p.160-166}}</ref>。しかし、船外パレットをISSに設置したままだとISSのロボティクス運用の制約となることから、船外パレットを輸送したスペースシャトルで即時回収されることが決まった<ref name="kibo kakutoku gijutsu 160-166p"/>。回収するにあたって、再搭載時に宇宙飛行士がカメラでスペースシャトルとの相対位置の確認に使うキールカメラターゲットを、装置交換機構(PIU)のある側とは反対側の先端部分にNASAの要請で追加で設置している<ref name="kibo kakutoku gijutsu 160-166p"/>。その後、2J/Aミッションで初めて打ち上げられたが、スペースシャトルが退役したため再使用されることはなかった<ref name="kibo kakutoku gijutsu 160-166p"/>。船外パレットの役割はHTVの曝露パレット(Exposed Pallet:EP)が担うこととなり、船外パレットの開発・運用で得られた技術は曝露パレットの開発・運用に活かされている<ref name="kibo kakutoku gijutsu 160-166p"/>。船外パレットが再使用されなくなったため、搭載する実験機器に設けられる、船外パレットに取り付けるための4本のペイロードトラニオン(Payload Attach Mechanism-Payload Unit:PAM-PU)は、HTVでの輸送時には打上げ保持機構(HTV Cargo Attachment Mechanism – Passive:HCAM-P)に変更される<ref name="kibo-ef jasma 2011"/>。 |
|||
2J/Aミッションでは、船外実験装置2基 (MAXI |
2J/Aミッションでは、船外実験装置2基 (MAXI、SEDA-AP) と衛星間通信システム (ICS-EF) を搭載し運搬した<ref name="kibo 2ja youyaku"/>。これらの搭載機器はきぼうロボットアームを使用して船外実験プラットフォームに移設され、船外パレットは空のままスペースシャトルのペイロードベイに戻されて、地球へ回収された<ref name="kibo 2ja youyaku"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/2ja/jle/|title=2J/Aミッション 「きぼう」船外パレット:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-06-10|accessdate=2019-01-25}}</ref>。 |
||
; 主要諸元<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.4 船外パレット. JAXA|date=2008-04|accessdate=2019-01-25}}</ref> |
|||
* 形状 - フレーム型 |
* 形状 - フレーム型 |
||
* 幅 - 4.9m |
* 幅 - 4.9m |
||
| 149行目: | 323行目: | ||
* 質量 - 1.2t(実験装置を含まない) |
* 質量 - 1.2t(実験装置を含まない) |
||
* 実験装置取付け場所 - 3箇所 |
* 実験装置取付け場所 - 3箇所 |
||
** 実験装置2個 |
** 実験装置2個+R-ORU 3個またはE-ORU 2個 |
||
* 電力 - 直流120V・最大1kW |
* 電力 - 直流120V・最大1kW |
||
* 熱制御方式 - ヒーター、断熱材 |
|||
* 環境制御性能 - なし |
* 環境制御性能 - なし |
||
* 寿命 - 10年以上 |
* 寿命 - 10年以上 |
||
[[ファイル:Kibo JEM-RMS in KSC-01.jpg|thumb|right| |
[[ファイル:Kibo JEM-RMS in KSC-01.jpg|thumb|right|250px|ロボットアーム(親アーム)]] |
||
[[ファイル:ISS-22 crew members in the Kibo lab.jpg|thumb|right|250px|エアロックの移動テーブルに取り付けられているのが子アーム。(2010年1月)]] |
|||
=== ロボットアーム (JEM-RMS) === |
=== ロボットアーム (JEM-RMS) === |
||
実験や船体の保全作業支援に使用する |
きぼうロボットアーム (JEM-Remote Manipulator System:JEM-RMS)は、実験や船体の保全作業支援に使用するロボットアームである<ref name="kibo robotarm">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/kibo/rms/|title=ロボットアーム:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-09-12|accessdate=2019-01-25}}</ref>。全長10mの親アームと、親アームの先端に取り付けて使用する2.2mの子アームの2つと船内のロボットアーム操作卓(RMSラック)からなる<ref name="kibo robotarm"/>。アームはそれぞれ6つの関節を持ち、人間の腕と同じような動作が可能である<ref name="kibo robotarm"/><ref name="kibo handbook 4.5"/>。 |
||
親アームは船内実験室のエアロックの左上にあるロボットアーム取付け台に設置されており<ref name="kibo sennai jikkenshitsu"/><ref name="kibo robotarm 1j"/>、親アームブーム(船内実験室側から順に1から3まである)、関節、把持手であるエンドエフェクター(End Effector)、テレビカメラ・雲台・照明(視覚装置)で構成され、親アームブーム2(肘部)と3(手首部)にテレビカメラ・雲台・照明(各々肘部視覚装置、手首部視覚装置)があり<ref name="kibo sengai handbook 2.3.5"/><ref name="kibo sengai handbook ver1 2-8,3-10"/>、カメラ超しに映像を見ながら船外実験装置の交換作業を中心に使われる<ref name="kibo handbook 4.5">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.5 ロボットアーム. JAXA|date=2008-04|accessdate=2019-01-25}}</ref>。子アームは、子アームエレクトロニクス、子アームブーム、関節、把持手であるエンドエフェクター(ツールと呼称)、テレビカメラで構成されている<ref name="kibo handbook 4.5"/>。親アームのエンドエフェクターで子アームを把持した上で、船外実験プラットフォームにある軌道上交換ユニット(ORU)の交換など、精度の高い作業で使われるため、アーム先端が対象物に合わせて自動でアームの姿勢制御を行うコンプライアンス機能が搭載されている<ref name="kibo robotarm"/><ref name="kibo handbook 4.5"/>。子アームを使わない時は、船外実験プラットフォーム上面の手前右に設けられている「子アーム保管装置(Small fine arm Stowage Equipment:SSE)」<ref name="kibo sengai jikken platform"/>に収められており、親アームも使わない時は、親アームブーム1を垂直に立てた上で親アームブーム2を斜め下に折り曲げた山折りの状態の保存姿勢で待機している<ref name="kibo robotarm 1j">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1j/rms/|title=1Jミッション 「きぼう」ロボットアーム:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-05-28|accessdate=2018-12-03}}</ref>。親アームは、電力・通信インターフェース付グラプルフィクスチャー(Power and Data Grapple Fixture:PDGF)と、軌道上取り外し可能型グラプルフィクスチャー(Flight Releasable Grapple Fixture:FRGF)の両方に対応している<ref name="kibo sengai handbook 2.3.1">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/JFE_HDBK_all.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=2.3.1 ロボットアーム. JAXA|date=2010-09|accessdate=2018-12-28}}</ref>。 |
|||
子アームはHTV初号機の与圧部に搭載して打ち上げられ、きぼう内で組み立てられた後、きぼうのエアロックを使って船外実験プラットフォームへ搬出され、子アーム保管装置に収納された<ref name="kibo weekly news no.378"/><ref name="kibo robotarm"/>。子アームが扱えるものは、きぼう標準のツールフィクスチャーが取り付けられているものに限られ、ツールフィクスチャーには把持及びトルク供給機能があるI型と、把持及び電力供給、信号授受機能があるII型の2種類ある<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/participation/application/documents/ef02/handbook.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=初版 2-6及び2-37. JAXA|date=2006-10|accessdate=2018-12-28}}</ref>。 |
|||
JEM-RMSは地上からも遠隔操作で動かすことができる<ref name="kibo kansei team"/>。2012年のHTV3号機からこの地上からの遠隔操作を本格使用する予定であり、そのための試験が2011年12月6日に行われた<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/archive/2011/12/111220_jemrms_demo.html|title=「きぼう」ロボットアームの遠隔操作デモンストレーション#3を実施|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2011-12-22|accessdate=2012-03-18}}</ref>。以後、ロボットアームの操作は主に地上からの遠隔で行われており、その分宇宙飛行士の活動時間を他の作業に割り当てることができるようになっている<ref>{{Cite web|和書|url=https://webronza.asahi.com/science/articles/2017032300003.html|title=ロボットアーム作業は重圧との戦い|publisher=[[朝日新聞]]|date=2017-04-24|accessdate=2018-12-02}}</ref><ref>{{Cite web|和書|url=https://ameblo.jp/astro-kanai/entry-12326455930.html|title=「きぼう」のシステム:ロボットアーム/エアロック|publisher=JAXA宇宙飛行士金井宣茂公式ブログ「宇宙、行かない?」|date=2017-11-08|accessdate=2018-12-02}}</ref>。 |
|||
なお、きぼうロボットアームの開発にあたって、1997年8月に打ち上げられたスペースシャトルの[[STS-85]]で行われたマニピュレーター飛行実証試験(Manipulator Flight Demonstration:MFD)<ref>{{Cite web|和書|url=https://iss.jaxa.jp/shuttle/flight/mfd/index.html|title=MFDマニピュレーター飛行実証試験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=1998-06-02|accessdate=2019-01-04}}</ref>のロボットアームや、1997年に打ち上げられた[[きく7号]]に搭載されたロボットアームで培われた技術と運用経験が設計に生かされており<ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/kibo/develop_status_21.html|title=第2回「きぼう」日本実験棟のロボットアーム操作性評価試験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2002-10-31|accessdate=2019-01-04}}</ref>、日本で3番目となる宇宙用遠隔操作型ロボットアームシステムであり、かつ日本初の実用宇宙ロボットである<ref name="NEC gihou vol.64 no.1 kibo"/><ref name="kibo handbook 4.5"/>。 |
|||
; 主要諸元<ref name="kibo robotarm"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.5 ロボットアーム. JAXA|date=2008-04|accessdate=2019-01-25}}</ref> |
|||
* 親アーム |
|||
** 型式 - 親子式6自由度アーム |
|||
** 自由度 - 6 |
|||
** 長さ - 10m |
|||
** 質量 - 780kg |
|||
** 取扱量 - 最大7,000kg |
|||
** 位置決め精度 - 並進±50mm、回転±1度 |
|||
** 先端速度 - 60mm/s(対象物:600kg以下)、30mm/s(対象物:3,000kg以下)、20mm/s(対象物:7,000kg以下) |
|||
** 最大先端力 - 30N以上 |
|||
** 寿命 - 10年以上 |
|||
* 子アーム |
|||
** 型式 - 親子式6自由度アーム |
|||
** 自由度 - 6 |
|||
** 長さ - 2.2m |
|||
** 質量 - 190kg |
|||
** 取扱量 - 最大300kg |
|||
** 位置決め精度 - 並進±10mm、回転±1度 |
|||
** 先端速度 - 50mm/s(対象物:80kg以下)、25mm/s(対象物:300kg以下) |
|||
** 最大先端力 - 30N以上 |
|||
** 寿命 - 10年以上 |
|||
[[ファイル:STS-129 Kibo laboratory.jpg|thumb|right|250px|画面上部にあるアンテナの付いている装置が衛星間通信システム曝露系サブシステム(ICS-EF)。(2009年11月)]] |
|||
=== 衛星間通信システム (ICS) === |
=== 衛星間通信システム (ICS) === |
||
衛星間通信システム(Inter-orbit Communication System:ICS)は、データ中継衛星[[こだま (人工衛星)|こだま]](DRTS)を介して[[筑波宇宙センター]]とデータ・画像・音声などの双方向通信を行う日本独自の通信システムである<ref name="kibo ICS">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/about/kibo/ics/|title=衛星間通信システム:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-08-19|accessdate=2019-01-25}}</ref>。船内実験室の与圧系サブシステム(ICS Pressurized Module subsystem:ICS-PM)でデータ処理を行い、2J/Aミッションで船外実験プラットフォームに設置された直径約80cmのアンテナを持つ曝露系サブシステム(ICS Exposed Facility subsystem:ICS-EF、船外実験プラットフォームのEFU#7に設置された<ref name="kibo sengai handbook ver1 2-8">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/participation/application/documents/ef02/handbook.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=初版 2-8の図2.1-1. JAXA|date=2006-10|accessdate=2018-12-26}}</ref>)で中継衛星・地上とを繋ぐ<ref name="kibo ICS"/>。 |
|||
きぼうの運用を効率的に行うため、船外実験プラットフォームには直径約80cmのアンテナを持つICS-EFが2J/Aで設置された。これとJAXAのデータ中継衛星[[こだま (人工衛星)|こだま]]を利用して、[[筑波宇宙センター]]との間でデータ・画像・音声などの双方向通信が行われている。こだまが1機しかなく、連続通信は不可能であるため、管制には使用せず大容量の実験データ送受信等に使用する。通信速度は、地上へのダウンリンクが50Mbps、地上からのアップリンクが3Mbpsとなっており、きぼうから地上へのハイビジョン映像の送信にも使われている<ref>[http://iss.jaxa.jp/weekly/100302.php ISS・きぼうウィークリーニュース第376号 インフォメーション]</ref>。 |
|||
ICS-EFの送受信用アンテナは自らの姿勢が変動してもこだまを自動追尾できるようになっている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.6 衛星間通信システム. JAXA|date=2008-04|accessdate=2019-01-25}}</ref>。ICSとこだまを利用して、こだまが2017年8月5日に退役するまでの間<ref name="kanai iss54/55 presskit"/><ref name="kibo ICS"/>、きぼうで行われた実験データの[[ダウンリンク]]に使われていた<ref name="monbu jaxa kodama taieki 20171018"/><ref name="monbu nippon space history 5-4">{{Cite web|和書|url=https://www.mext.go.jp/a_menu/kaihatu/space/kaihatsushi/detail/1299941.htm|title=宇宙開発利用 我が国の宇宙開発史 第五章日本の有人宇宙技術の発展 (4)日本の実験棟「きぼう」(JEM)|publisher=文部科学省|date=2011-02|accessdate=2019-02-12}}</ref>。また、2014年6月にNASAからこだまを[[TDRS]]の予備回線として使いたいと打診があり予備として用いられたが、TDRSが健全であったため実際に予備回線として使われることはなかった<ref name="monbu jaxa kodama taieki 20171018">{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/059/shiryo/__icsFiles/afieldfile/2017/10/27/1397652_4.pdf|title=データ中継技術衛星「こだま」(DRTS)の運用終了について|publisher=文部科学省|author=JAXA|date=2017-10-18|accessdate=2019-01-25}}</ref>。通信速度は、地上へのダウンリンクが50Mbps、地上からのアップリンクが3Mbpsとなっており<ref name="kibo ICS"/>、きぼうから地上へのハイビジョン映像の送信にも使われている<ref name="kibo weekly news no.376">{{Cite web|和書|url=https://iss.jaxa.jp/weekly/100302.php|title=ISS・きぼうウィークリーニュース第376号|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2010-03-02|accessdate=2018-11-30}}</ref>。 |
|||
; 主要諸元<ref name="kibo ICS"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.6 衛星間通信システム. JAXA|date=2008-04|accessdate=2019-01-25}}</ref> |
|||
* 大きさ - ICS-PM・2.0m×1.0m×0.9m、ICS-EF・アンテナ収納時1.1m×0.8m×2.0m、ICS-EF・アンテナ展開時2.2m×0.8m×2.0m |
|||
* 重さ - ICS-PM・330kg、ICS-EF・310kg |
|||
* 通信速度・周波数・変調方式 - ICSから地上・50Mbps・約26GHz・QPSK(Quadrature Phase Shift Keying:四位相偏移変調)、地上からICS・3Mbps・約23GHz・BPSK(Binary Phase Shift Keying:二位相偏移変調) |
|||
* DRTS可視時間(理論値) - 1日あたり計約7.8時間(DRTSが1機の場合)、1回あたり最大約40分 |
|||
{{multiple image |
|||
| align = center |
|||
| header = 各方向から見たきぼう |
|||
| width = 250 |
|||
| image1 = STS-133 International Space Station after undocking (closeup).jpg |
|||
| alt1 = 雲に覆われた地球を背景にした「きぼう」日本実験棟とHTV(こうのとり)の進行方向側側面 |
|||
| caption1 = 進行方向側(前方)から見たきぼう、左上はHTV(こうのとり)2号機。(2011年3月) |
|||
| image2 = Kibo completed view2.jpg |
|||
| alt2 = 漆黒の宇宙空間を背景にした「きぼう」日本実験棟の進行方向の反対側側面 |
|||
| caption2 = 進行方向の反対側(後方)から見たきぼう。写真上部が天底側、下部が天頂側。(2009年7月) |
|||
| image3 = STS-134 International Space Station after undocking 7.jpg |
|||
| alt3 = 地球を背景にした「きぼう」日本実験棟の天頂面 |
|||
| caption3 = 天頂側から見たきぼう(2011年5月) |
|||
| image4 = STS-130 Endeavour flyaround 8.jpg |
|||
| alt4 = 漆黒の宇宙空間を背景にした「きぼう」日本実験棟の天底面 |
|||
| caption4 = 地心側から見たきぼう(2010年2月) |
|||
}} |
|||
== 実験装置 == |
== 実験装置 == |
||
きぼうの置かれている宇宙環境は過酷で、10<sup>-6</sup>~10<sup>-4</sup>Gの微小重力で、様々な宇宙放射線が飛び交い、10<sup>-5</sup>Paの高真空で僅かにある周囲の大気組成は85%が原子状酸素となっており、太陽エネルギーは1.4kw/m<sup>2</sup>に上る<ref>{{Cite web|和書|url=https://ssl.jspacesystems.or.jp/wp-content/uploads/sites/11/2013/03/h22_1.pdf|title=平成22年度 宇宙環境利用の展望 第1章 「きぼう」実験運用の概要 - 「きぼう」利用の舞台裏 -|publisher=1-2. 一般財団法人宇宙システム開発利用推進機構|author=JAXA|date=2011-02|accessdate=2019-01-22}}</ref>。ISS計画はこうした特殊な環境を利用して、宇宙での実験・研究・観測などを行うのが目的であり、きぼうは実験施設として様々な船内・船外実験装置を運用している<ref name="kibo iss gaiyou"/>。スペースシャトルの打上げ能力の制限のため<ref name="kibo faq iss 39"/>、打ち上げ時には実験ラックは2台しか装置を搭載しておらず<ref name="kibo 1j/a rack"/><ref name="kibo 1j rack"/>、残りはアメリカの実験装置できぼうに移設されている<ref name="monbu iss riyou joukyou 20100430">{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/uchuu/015/003/gijiroku/__icsFiles/afieldfile/2010/05/10/1293367_14.pdf|title=米国および欧州におけるISS利用状況|publisher=文部科学省|author=JAXA|date=2010-04-30|accessdate=2019-01-22}}</ref>。また、2011年以降に順次HTVで残りの実験ラックを輸送している<ref name="kibo jikken souchi"/><ref name="kibo sengai jikkensouchi"/><ref name="htv-2 gaiyou"/>。きぼうで最初に行われた実験は、2008年8月22日午前6時53分から始まった流体実験ラックで行われた[[対流|マランゴニ対流]]実験である<ref name="kibo weekly news no.308"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/130228_marangoni_ends.html|title=「きぼう」日本実験棟において実施されていた、マランゴニ対流実験の1テーマ目が終了しました|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2013-02-28|accessdate=2018-12-03}}</ref><ref>{{Cite web|和書|url=https://ssl.jspacesystems.or.jp/wp-content/uploads/sites/11/2013/03/h22_1.pdf|title=平成22年度 宇宙環境利用の展望 第1章 「きぼう」実験運用の概要 - 「きぼう」利用の舞台裏 -|publisher=1-1. 一般財団法人宇宙システム開発利用推進機構|author=JAXA|date=2011-02|accessdate=2019-01-22}}</ref>。 |
|||
きぼうは実験施設であり、宇宙実験を行うことが利用目的である。スペースシャトルの打上げ能力の制限のため、打ち上げ時には実験ラックは2台しか装置しか搭載しておらず、残りは米国実験棟デスティニーから移設した。また2011年以降に順次HTVで残りの実験ラックを輸送している。 |
|||
[[ファイル:ISS-22 Soichi Noguchi works in the Kibo lab.jpg|thumb|right|250px|流体物理実験装置でマランゴニ対流実験の作業をしている[[野口聡一]]宇宙飛行士。(2010年1月)]] |
|||
[[ファイル:ISS019-E-006769.jpg|thumb|right|250px|細胞実験ラック]] |
|||
[[ファイル:HTV 2 Multi-purpose Small Payload Rack.JPG|thumb|right|250px|多目的実験ラック]] |
|||
[[ファイル:ISS-49 Takuya Onishi with the Group Combustion Module in the Kibo lab.jpg|thumb|right|250px|多目的実験ラックの前で液滴群燃焼実験の作業を行っている[[大西卓哉]]宇宙飛行士。前にある容器は燃焼実験チャンバー(CCE)。(2016年9月)]] |
|||
[[ファイル:316481main MELFI9.jpg|thumb|right|250px|冷凍・冷蔵庫 (MELFI)]] |
|||
=== 船内実験室実験装置 === |
=== 船内実験室実験装置 === |
||
米国、欧州と共通の[[国際標準実験ラック]] (ISPR) をJAXAが5基、NASAが5基設置する |
きぼう船内実験室には実験ラックの設置する場所が10か所あり、その内米国、欧州と共通の[[国際標準実験ラック]] (ISPR) をJAXAが5基、NASAが5基設置する<ref name="kibo jikken souchi">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/|title=船内実験装置:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-08-02|accessdate=2018-11-16}}</ref>。NASAは一部の実験装置をきぼうに移設している<ref name="monbu iss riyou joukyou 20100430"/>。2009年夏の[[STS-128]]でISPRと同じ大きさのISS長期滞在員用の個室1台を「きぼう」内に運んで仮設置した<ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/17a/mission/payload/mplm/|title=「レオナルド」(多目的補給モジュール1):国際宇宙ステーションの組立フライト17A(STS-128)|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-08-25|accessdate=2019-01-22}}</ref>([[野口聡一]][[宇宙飛行士]]が利用)が、2010年9月にこの個室は[[ハーモニー (ISS)|ハーモニー]]へ移設されている<ref name="yui iss taizai furoku1-6"/>。 |
||
JAXAが設置 |
JAXAが設置しているラックは以下の通り。 |
||
==== 流体実験ラック (RYUTAI) ==== |
==== 流体実験ラック (RYUTAI) ==== |
||
1J/Aミッションで |
流体実験ラック(Ryutai Experiment Rack:RYUTAI)は、1J/Aミッションで船内保管室に搭載して打ち上げられ、1Jミッションで船内実験室に移設された<ref name="kibo 1j/a rack"/>。[[対流|マランゴニ対流]]の観察や[[結晶成長]]実験などを行う装置を搭載し、結晶生成の仕組みの解明や結晶成長制御技術の開発を行うための実験を行う<ref name="kibo 1j/a rack"/>。 |
||
* [[流体]]物理実験装置 (Fluid Physics Experiment Facility:FPEF) - 沸騰、熱伝達、濡れ性、燃焼、泡挙動、マランゴニ対流などの流体の動きを、地球の重力の影響を排して[[無重量状態|微小重力]]環境下で実験・観察を行う<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/fpef/|title=流体物理実験装置(FPEF):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-06-17|accessdate=2018-11-16}}</ref>。 |
|||
* [[流体]]物理実験装置 (FPEF) |
|||
* [[溶液]]結晶化観察装置 (Solution Crystallization Observation Facility:SCOF) - 自然対流の発生しない宇宙空間で、結晶の形・組織・温度・濃度・生成成長過程の様子を観察する<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/scof/|title=溶液結晶化観察装置(SCOF):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2007-12-28|accessdate=2018-11-16}}</ref>。 |
|||
* [[溶液]]結晶化観察装置 (SCOF) |
|||
* [[蛋白質]]結晶生成装置 (Protein Crystallization Research Facility:PCRF) - セルカートリッジが6つあり、それぞれ個別に蛋白質の個性に合った温度、濃度、圧力などの条件を細かく設定ができる<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/pcrf/|title=タンパク質結晶生成装置(PCRF):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-09-14|accessdate=2018-11-16}}</ref>。 |
|||
* [[蛋白質]]結晶生成装置 (PCRF) |
|||
* 画像取得処理装置 (Image Processing Unit:IPU) - 地上へ送信できなかった実験画像データを、同時にモニター・録画(データ保存用ハードディスク120Gバイトを最大6台搭載可能)し圧縮(MPEG2方式、6チャンネル同時)処理を行い、伝送ラインを用いて地上に送る機能を持つ<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/ipu/|title=画像取得処理装置(IPU):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-09-09|accessdate=2018-11-16}}</ref>。 |
|||
* 画像取得処理装置 (IPU) |
|||
==== 細胞実験ラック (SAIBO) ==== |
==== 細胞実験ラック (SAIBO) ==== |
||
1J/Aミッションで |
細胞実験ラック(Saibo Experiment Rack:Saibo)は、1J/Aミッションで船内保管室に搭載して打ち上げられ、1Jミッションで船内実験室に移設された<ref name="kibo 1j/a rack"/>。植物や細胞などを[[培養]]する装置を搭載し、宇宙環境が生物にどのような影響を与えるのかを解明するための実験を行う<ref name="kibo 1j/a rack"/>。 |
||
* [[細胞培養]]装置 (CBEF) |
|||
* [[クリーンベンチ]] (CB) |
|||
* [[細胞培養]]装置 (Cell Biology Experiment Facility:CBEF) - 微小重力培養室と回転テーブルによる最大2Gまでの人工重力を起こせる培養室の2つの培養室を持っている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/cbef/|title=細胞培養装置(CBEF):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-06-16|accessdate=2018-11-16}}</ref>。 |
|||
==== 冷凍冷蔵庫 (MELFI) ==== |
|||
* [[クリーンベンチ]] (Clean Bench:CB) - 生物実験で実験試料がカビやほこりに汚染されないよう、微小粒子が100から1,000個の環境を作り出す装置<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/cb/|title=クリーンベンチ(CB):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-08-02|accessdate=2018-11-16}}</ref>。2018年8月2日現在、運用を行っていない<ref name="kibo jikken souchi"/>。 |
|||
ESAが開発した冷凍冷蔵庫で、米国実験棟デスティニーから1台が移設された。「きぼう」内には計2台設置されている。 |
|||
==== 勾配炉ラック ==== |
==== 勾配炉ラック (KOBAIRO) ==== |
||
勾配炉ラック(KOBAIRO Rack:KOBAIRO)は、2011年1月に[[こうのとり2号機|HTV2号機]]で運搬されて設置された<ref name="htv-2 gaiyou">{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-2/|title=宇宙ステーション補給機(HTV)HTV2ミッション |publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2019-01-22}}</ref>。 |
|||
2011年1月にHTV2で運搬されて設置された。試料を最高摂氏1600度まで加熱して融解、冷却、結晶化して半導体の性質を研究する材料実験ラック。最大15個の試料をあらかじめクルーが装着しておくことにより、地上からの遠隔操作で試料の交換や実験操作が可能である。 |
|||
* 温度勾配炉(Gradient Heating Furnace:GHF) - 試料を最高摂氏1,600度まで加熱して融解、冷却、結晶化して[[半導体]]の性質を研究する材料実験ラック。最大15個の試料をあらかじめ搭乗員が装着しておくことにより、地上からの遠隔操作で試料の交換や実験操作が可能である。炉体部 (GHF-Material Processing Unit:GHF-MP)、試料自動交換機構 (Sample Cartridge Automatic Exchange Mechanism:SCAM)、制御装置 (GHF-Control Equipment:GHF-CE)の3つで構成されている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/ghf/|title=温度勾配炉(GHF):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2011-02-08|accessdate=2018-11-16}}</ref>。 |
|||
* 炉体部 (GHF-MP) |
|||
* 試料自動交換機構 (SCAM) |
|||
* 制御装置 (GHF-CE) |
|||
==== 多目的実験ラック (MSPR) ==== |
==== 多目的実験ラック (MSPR) ==== |
||
多目的実験ラック (Multi-purpose Small Payload Rack:MSPR)は、2011年1月にHTV2号機で運搬されて設置された<ref name="htv-2 gaiyou"/>。大型実験装置用のワークボリューム(WV)、小型実験装置用の小規模実験エリア(SEA)、作業台のワークベンチ(WB)からなっており、電力・通信・ガスといった各リソースを提供し、以下の実験装置を入れ替えることにより様々な実験が行える<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/mspr/|title=多目的実験ラック(MSPR):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-02-16|accessdate=2018-11-22}}</ref>。 |
|||
2011年1月にHTV2で運搬されて設置された。以下の実験装置を入れ替えることにより様々な実験が行える。 |
|||
* 燃焼実験チャンバー (Chamber for Combustion Experiment:CCE)(HTV2で運搬) - 多目的実験ラックのワークボリューム内に設置されている燃焼実験を行うための装置<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/mspr/chamber/|title=燃焼実験チャンバー:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-02-16|accessdate=2018-11-16}}</ref>。 |
|||
* 燃焼実験チャンバ (CCE)(HTV2で運搬) |
|||
* 水棲生物実験装置 (Aquatic Habitat:AQH)(HTV3で運搬) - [[モデル生物]]である[[メダカ]]と[[ゼブラフィッシュ]]を90日間かけて3世代の継代飼育を行う装置<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/mspr/aqh/|title=水棲生物実験装置(AQH):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-08-02|accessdate=2018-11-16}}</ref>。2018年8月2日現在、運用を行っていない<ref name="kibo jikken souchi"/>。 |
|||
* 水棲生物実験装置 (AQH)(HTV3で運搬) |
|||
* 液滴群燃焼実験供試体(Group Combustion Experiment Module:GCEM)(HTV5で運搬) - 熱による自然対流が起きない微小重力下で燃料液滴群(燃料を微小粒子化したものの群体)の燃焼の仕組みを観察する装置<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/mspr/gcem/|title=液滴群燃焼実験供試体(GCEM):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-02-16|accessdate=2018-11-16}}</ref><ref>{{Cite web|和書|url=http://www.yamaguchi-u.ac.jp/weeklynews/2016/_5853.html|title=国際宇宙ステーション・「きぼう」日本実験棟での燃焼実験に成功~JAXAと山口大学の共同実験 Group Combustion実験(研究代表者:三上真人教授)~|publisher=国立大学法人 山口大学|date=2017-03-03|accessdate=2018-11-16}}</ref>。 |
|||
* 静電浮遊炉 (ELF)(HTVで平成26年度に運搬予定) |
|||
* 沸騰・二相流体ループを用いた気液界面形成と熱伝達特性(Interfacial Behaviors and Heat Transfer Characteristics in Boiling Two-Phase Flow:TPF)(HTV6で運搬) - 無重力化で液体の熱の伝わりやすさを調べ、得られたデータを人工衛星、探査機、宇宙基地などの排熱システムの設計に応用させるためのデータベース構築を行う実験<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/mspr/tpf/|title=沸騰・二相流実験供試体:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-03-16|accessdate=2018-11-16}}</ref>。 |
|||
* 微粒化観察装置(Atomization Observation Equipment:AOE) - 無重力環境下で液糸が分かれていく過程をハイスピードカメラで撮る装置。この実験により明らかにされた新しい微粒化概念を噴霧燃焼シミュレーターに反映させ、新型エンジン開発に応用する<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/180829_atomization.html|title=Atomization実験が始まりました:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-08-29|accessdate=2018-11-16}}</ref>。 |
|||
* 次世代水再生実証システム(JEM Water Recovery System: JWRS)(開発中) - 現在ISSで使われている水再生システムより、小型で消費電力が少なく再生効率の高い、保守整備が容易な次世代型水再生システムを開発するにあたって、小型の実証システムを先に開発し、きぼうで実証実験を行う予定<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/mspr/jwrs/|title=次世代水再生実証システム:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-02-01|accessdate=2018-11-16}}</ref>。 |
|||
==== |
==== 多目的実験ラック2 (MSPR-2) ==== |
||
多目的実験ラック2 (Multi-purpose Small Payload Rack 2:MSPR-2)は、2015年8月に[[こうのとり5号機|HTV5号機]]で運搬されて設置された<ref name="htv-5 tousaihin">{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-5/payload/|title=宇宙ステーション補給機(HTV) 「こうのとり」5号機の主な搭載品|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2015-08-12|accessdate=2019-01-22}}</ref>。 |
|||
今後、静電浮遊炉 (ELF) の運搬が2012年以降に計画されている<ref>[http://iss.jaxa.jp/kiboexp/pm/ JAXA 「きぼう」日本実験棟 船内実験室実験装置] {{webarchive|url=https://web.archive.org/web/20120322034150/http://iss.jaxa.jp/kiboexp/pm/ |date=2012年3月22日 }}</ref>。 |
|||
* 静電浮遊炉 (Electrostatic Levitation Furnace:ELF)(HTV5で運搬<ref name="htv-5 tousaihin"/>) - 地上では容器から不純物が入るため、微小重力下で静電気を使ってガラスなどの材料を浮かせ、複数のレーザーを照射して溶かしたり固めたりすることができる装置<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/elf/|title=静電浮遊炉(ELF):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2016-01-19|accessdate=2018-11-16}}</ref>。 |
|||
==== 冷凍・冷蔵庫 (MELFI) ==== |
|||
冷凍・冷蔵庫(Minus Eighty degree Celsius Laboratory Freezer for ISS:MELFI)は、[[ESA]]が開発した<ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/report/06_35.html|title=国際宇宙ステーションNASAステータスレポート #06-35|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2006-07-31|accessdate=2019-01-22}}</ref><ref>{{Cite web|url=http://wsn.spaceflight.esa.int/docs/Factsheets/16%20MELFI%20HR_WEB.pdf|title=→ MINUS EIGHTY LABORATORY FREEZER FOR ISS (MELFI)|publisher=ESA|accessdate=2019-02-01}}</ref>窒素ガスを冷媒にした冷凍・冷蔵庫である。スペースシャトル[[STS-121]]、[[STS-128]]、[[STS-131]]の3回に分けて打ち上げられ<ref>{{Cite web|url=https://www.nasa.gov/pdf/440897main_sts_131_press_kit.pdf|title=SPACE SHUTTLE MISSION STS-131 Experiment Express PRESS KIT/April 2010|publisher=40ページ目. NASA|date=2010-04|accessdate=2019-02-01}}</ref>、アメリカはこの内2台をきぼうに移設しており、その内MELFI-1は日本が15%の利用権を持っている<ref>{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/uchuu/015/003/gijiroku/__icsFiles/afieldfile/2010/05/21/1293979_4.pdf|title=国際宇宙ステーション(ISS)/きぼう利用の現状と計画|publisher=30-32ページ目. 文部科学省|date=2010-05-14|accessdate=2019-02-01}}</ref><ref>{{Cite web|url=https://www.nasa.gov/sites/default/files/atoms/files/np-2017-04-014-jsc_iss_utilization_brochure_2017_web_5-23-17_0.pdf|title=International Space Station Facilities Research in Space 2017 and Beyond|publisher=16ページ目. NASA|date=2017|accessdate=2019-02-05}}</ref>。4つの冷凍室があり、-80度、-26度、+4度に温度を設定でき、常温の実験試料を3時間以内に-80度まで冷却でき、8時間停電しても設定温度を維持できる性能を持っている。実験試料を冷却したまま運べるようになっており、15回の打ち上げと10年間の運用ができるようになっている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/melfi/|title=冷凍・冷蔵庫(MELFI):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2007-12-28|accessdate=2018-11-16}}</ref>。 |
|||
==== EXPRESS Rack 4及び5 ==== |
|||
EXPRESS Rack 4(Expedite the Processing of Experiment to the Space Station Rack 4)及びEXPRESS Rack 5は、2001年8月にスペースシャトル[[STS-105]]で打ち上げられたNASAの実験ラック<ref name="nasa express rack">{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/608.html|title=EXpedite the PRocessing of Experiments to Space Station Rack (EXPRESS Rack)|publisher=NASA|date=2019-01-16|accessdate=2019-02-01}}</ref>。EXPRESSラックは国際標準実験ラック(ISPR)の一種で、実験装置に対する電力、通信、真空排気、窒素ガス、冷却(水冷・空冷<ref>{{Cite web|url=https://www.nasa.gov/centers/marshall/history/express.html|title=EXPRESS Racks|NASA|publisher=NASA|date=2017-10-14|accessdate=2019-02-05}}</ref>)、水、取付け機構などの供給機能を持っており、複数分野にわたる科学実験<ref name="nasa msfc expressracks4,5"/>を円滑に進める目的で[[マーシャル宇宙飛行センター]](MSFC)と[[ボーイング]]社によって開発された<ref name="nasa express rack"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/ulf5/mission/payload/pmm/|title=恒久型多目的モジュール(PMM):国際宇宙ステーションの組立フライトULF5(STS-133)|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2010-10-26|accessdate=2019-02-01}}</ref>。地上から遠隔操作でき、マーシャル宇宙飛行センターにある搭載物運営統合センター(Payload Operations and Integration Center:POIC)で、ペイロード開発者又はペイロードラックオフィサー(PRO)が操作を行う<ref name="nasa express rack"/>。EXPRESS Rack 4と5は、最初デスティニーに設置され、その後きぼうに移されている<ref name="kanai iss54/55 presskit"/><ref name="nasa msfc expressracks4,5">{{Cite web|url=https://www.nasa.gov/centers/marshall/news/background/facts/express4_5.html|title=EXPRESS Racks 4 and 5 fact sheet|publisher=NASA|date=2001-07|accessdate=2019-02-02}}</ref>。2014年8月31日までの稼働時間はEXPRESS Rack 4が93,654時間で、EXPRESS Rack 5が845時間となっている<ref>{{Cite web|url=https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20140016876.pdf|title=MISCSIoONn SdYSuTEcMSting Research on the International Space Station using the EXPRESS Rack Facilities|publisher=4ページ目. NASA|date=2014-10|accessdate=2019-02-05}}</ref>。ラップトップコンピューターには、Lenovo T61pが用いられている<ref>{{Cite web|url=https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20140016876.pdf|title=MISCSIoONn SdYSuTEcMSting Research on the International Space Station using the EXPRESS Rack Facilities|publisher=10ページ目. NASA|date=2014-10|accessdate=2019-02-05}}</ref>。 |
|||
* 「EXPRESS Rack 4」搭載機器(2017年時点)<ref name="nasa utilization brochure 2017">{{Cite web|url=https://www.nasa.gov/sites/default/files/atoms/files/np-2017-04-014-jsc_iss_utilization_brochure_2017_web_5-23-17_0.pdf|title=International Space Station Facilities Research in Space 2017 and Beyond|publisher=27ページ目. NASA|date=2017|accessdate=2019-02-05}}</ref> |
|||
** DECLIC(Device for the Study of Critical Liquids & Crystallization) - 流体学に関する実験機器。 |
|||
** NanoRacksプラットフォーム(NanoRacks Platforms) - 実験プラットフォームとして各種実験が行えるNanoRacksモジュールに電力・通信機能を提供し、最大で16のペイロードを搭載できる<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/829.html|title=NanoRacks Platforms|publisher=NASA|date=2018-09-26|accessdate=2019-02-05}}</ref> |
|||
** ELITE-S2(ELaboratore Immagini TElevisive - Space 2) - 宇宙船設計に人間工学を反映させるために無重力化での脳や視覚と運動の関係を明らかにする実験機器<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/78.html|title=ELaboratore Immagini TElevisive - Space 2 (ELITE-S2)|publisher=NASA|date=2019-01-16|accessdate=2019-02-05}}</ref>。 |
|||
** Plate reader-2 - [[マイクロプレートリーダー]]を搭載した実験機器<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/542.html|title=NanoRacks Plate Reader|publisher=NASA|date=2019-01-10|accessdate=2019-02-05}}</ref>。 |
|||
** TangoLab-1(Payroad Card MultiLab) - カード型のペイロードを複数搭載できる実験機器<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/1917.html|title=TangoLab-1|publisher=NASA|date=2019-01-16|accessdate=2019-02-05}}</ref>。 |
|||
** SAMS-II-RTS2(Space Acceleration Measurement System-II Multiple Remote Triaxial Sensor) - ISSに加わる振動や加速度を調べる実験機器<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/990.html|title=Space Acceleration Measurement System-II (SAMS-II)|publisher=NASA|date=2019-01-23|accessdate=2019-02-05}}</ref> |
|||
* 「EXPRESS Rack 5」搭載機器(2017年時点)<ref name="nasa utilization brochure 2017"/> |
|||
** MERLIN5(Microgravity Experiment Research Locker Incubator 5) - 実験試料を-20度から+48.5度の間で保存できる冷凍・冷蔵庫・[[インキュベーター (生物学)|恒温器]](インキュベーター)<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/29.html|title=Microgravity Experiment Research Locker Incubator (MERLIN)|publisher=NASA|date=2019-01-10|accessdate=2019-02-05}}</ref> |
|||
** SG100 Cloud Computer - より高性能でシングルイベント現象を含むより高い耐放射線性を持った低軌道放射線環境下での長期動作・技術実証を行うコンピューター<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/2322.html|title=SG100 Cloud Computing Payload (SG100 Cloud Computer)|publisher=NASA|date=2019-01-16|accessdate=2019-02-05}}</ref>。 |
|||
** LDST(Long Duration Sorbent Testbed) - 吸着剤の長期試験を行う実験機器<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/2144.html|title=Long Duration Sorbent Testbed (LDST)|publisher=NASA|date=2019-01-16|accessdate=2019-02-05}}</ref>。 |
|||
** Advanced Plant Habitat - 植物実験を行う実験機器<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/2302.html|title=Advanced Plant Habitat (Plant Habitat)|publisher=NASA|date=2019-01-30|accessdate=2019-02-05}}</ref>。 |
|||
** SpaceDRUMS(Space Dynamically Responding Ultrasonic Matrix System) - [[カナダ宇宙庁]]とギニエ社(Guigne Space Systems)が開発した超音波浮遊炉で、2009年10月から2013年3月まで燃焼合成実験を行っていたが2015年には撤去されている<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/218.html|title=Space Dynamically Responding Ultrasonic Matrix System (SpaceDRUMS) |publisher=NASA|date=2017-04-26|accessdate=2019-02-05}}</ref><ref>{{Cite web|和書|url=http://www.jasma.info/journal/wp-content/uploads/sites/2/2015/01/2015_p320104.pdf|title=ISS搭載用静電浮遊炉の概要|publisher=[[日本マイクログラビティ応用学会]]|date=2015-01-31|accessdate=2019-02-05}}</ref><ref>{{Cite web|url=https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20140016876.pdf|title=MISCSIoONn SdYSuTEcMSting Research on the International Space Station using the EXPRESS Rack Facilities|publisher=17ページ目. NASA|date=2014-10|accessdate=2019-02-05}}</ref>。 |
|||
==== その他の機器 ==== |
|||
* 受動積算型宇宙放射線線量計(Passive Dosimeter for Lifescience Experiments in Space:PADLES) - 搭乗員や生物試料が受ける宇宙放射線と微小重力環境の影響を調べるためのもので、プラスチック飛跡検出器(CR-39)と熱蛍光線量計(TLD-MSO)の2つの検出器で構成されている生物実験用ドシメーターパッケージと自動線量解析システムのこと。縦横2.5cm、厚さ約5mm<ref name="isas news no.334 PADRES">[https://www.isas.jaxa.jp/j/column/kibou/06.shtml “ISAS|第6回:PADLES宇宙放射線計測実験がスタート! /きぼうの科学”]. JAXA (2009年1月). 2019年2月26日閲覧。</ref>。これを利用した「Area PADLES」「Bio PADLES」「Crew PADLES」の3つの宇宙放射線計測実験が行われている<ref name="isas news no.334 PADRES"/>。「Area PADLES」は、きぼう船内実験室の両端と中間の四隅に1つずつ計12か所と船内保管室床面の4つと天井に1つの計5か所、合わせて計17か所に設けて計測が行われており、2008年6月以降約半年ごとに回収と交換が行われる。「Bio PADLES」は、研究者からの依頼を受けて行う生物試料の被曝線量計測実験で、幅広い温度環境に対応している<ref name="isas news no.334 PADRES"/>。「Crew PADLES」は、宇宙飛行士個人の被曝線量計として被曝管理に使われており、ストラップが付いた携帯用のものである<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/padles/|title=受動積算型宇宙放射線線量計(PADLES):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2015-11-11|accessdate=2018-11-20}}</ref>。 |
|||
* 宇宙放射線リアルタイムモニター装置(Position Sensitive Tissue Equivalent Proportional Chamber:PS-TEPC) - JAXAと高エネルギー加速度研究機構(KEK)が共同開発した、宇宙放射線の線量計測を行う装置で、きぼう船内実験室のエアロック横の壁に設置されている。従来、JAXAの受動型線量計とNASAの能動型計測器を用いて日本人宇宙飛行士の被曝線量管理を行っていたが、測定精度に難があったため、新たに開発されたこの装置でより正確な線量計測技術の技術実証を行う<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/pstepc/|title=宇宙放射線リアルタイムモニタ装置:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-03-30|accessdate=2018-11-21}}</ref>。 |
|||
* 微小重力計測装置(Microgravity Measurement Apparatus:MMA) - ISS内の微小重力環境は常に変化し、実験に影響を及ぼすため、3軸の加速度センサーを持っているこの装置で微小重力環境の測定を行う。きぼう内の実験ラックの表面に5個まで設置可能<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/pm/plt/|title=PLT・MMA・UDC:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-09-29|accessdate=2018-11-21}}</ref>。 |
|||
* 「きぼう」搭載用ポータブル冷凍・冷蔵庫(FROST) - 2013年8月に[[こうのとり4号機|HTV4号機]]で打ち上げられた小型の冷凍・冷蔵庫である<ref>{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-4/|title=宇宙ステーション補給機(HTV) 「こうのとり」4号機(HTV4)ミッション|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2019-02-01}}</ref>。このFROST1に続き、2017年2月にはFROST2がドラゴン宇宙船10号機([[スペースX CRS-10]]、SpX-10)によって打ち上げられ、計2台がきぼうに設置されている<ref>{{Cite web|和書|url=https://fpsc.twinbird.jp/user_data/packages/default/client/pdf/info/FROST2_eng.pdf|title=FPSC冷凍庫, “FROST2” 宇宙で稼働中|publisher=[[ツインバード工業]]|date=2018-04|accessdate=2019-02-01}}</ref>。既存のMELFIは既に飽和状態であり、日本が使える新たな冷凍・冷蔵庫が必要だったため、[[ツインバード工業]]の冷凍冷却ユニット「FPSC」(フリーピストン・スターリング方式冷凍機)を基にJAXAなどと共同で開発された<ref name="itmedia frost twinbird 1/3">{{Cite web|和書|url=https://www.itmedia.co.jp/lifestyle/articles/1404/11/news003.html|title=“宇宙冷蔵庫”誕生秘話――ツインバードの冷蔵庫はいかにして宇宙へと羽ばたいたのか? (1/3)|publisher=[[ITmedia]]|date=2014-04-11|accessdate=2019-02-01}}</ref>。ヘリウムガスを用い、その[[断熱膨張]]を利用して最大-70度以上まで冷却可能<ref name="itmedia frost twinbird 1/3"/>な[[冷凍機#スターリング冷凍機|スターリング冷却器]]で、庫内の温度差を±0.5度以内に保てるようになっており<ref name="itmedia frost twinbird 2/3"/>、国産の新保冷剤を使って停電時でも最長8時間まで<ref name="itmedia frost twinbird 2/3">{{Cite web|和書|url=https://www.itmedia.co.jp/lifestyle/articles/1404/11/news003_2.html|title=“宇宙冷蔵庫”誕生秘話――ツインバードの冷蔵庫はいかにして宇宙へと羽ばたいたのか? (2/3)|publisher=ITmedia|date=2014-04-11|accessdate=2019-02-01}}</ref>保冷できるようになっている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-4/payload/|title=宇宙ステーション補給機(HTV) 「こうのとり」4号機(HTV4) 搭載品|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2014-01-14|accessdate=2019-02-01}}</ref><ref>{{Cite web|和書|url=http://iss.jaxa.jp/user/opp/nonfixed/3-2-1.html|title=船内利用:「きぼう」を使ってみませんか|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2015-03-31|accessdate=2019-02-01}}</ref>。船内実験室の左側の窓の脇に設置されている<ref>{{Cite web|和書|url=https://www.itmedia.co.jp/lifestyle/articles/1404/11/news003_3.html|title=“宇宙冷蔵庫”誕生秘話――ツインバードの冷蔵庫はいかにして宇宙へと羽ばたいたのか? (3/3)|publisher=ITmedia|date=2014-04-11|accessdate=2019-02-01}}</ref>。 |
|||
[[ファイル:Canadarm2 and JEMRMS.jpg|thumb|right|250px|カナダアーム2からHTVの曝露パレットI型を受け取るきぼうロボットアーム<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/JFE_HDBK_all.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=3.2.2 船外プラットフォームへの図3.2.2-1. JAXA|date=2010-09|accessdate=2018-12-25}}</ref>。(2009年9月)]] |
|||
=== 船外実験プラットフォーム実験装置 === |
=== 船外実験プラットフォーム実験装置 === |
||
実験装置は大きさ0.8m×1.0m×1.85mの重さ500kg以内で、直方体の形をしたJEM曝露部搭載型共通バス機器部(APBUS)と呼ばれる標準ペイロードの箱に入れられ、船外実験プラットフォームに設置される。きぼう船外実験プラットフォームには、船内実験室と同じく実験機器の設置する場所が10か所あり、各実験機器へ電力・冷却水・通信機能を供給している。10か所の内、JAXAが5基、NASAが5基の実験機器を設置する。船外実験プラットフォームに取り付けた状態で打ち上げることはできないため、船外パレットやHTVの曝露パレットに搭載して打ち上げるか「きぼう」のエアロック経由で船外に出し、ロボットアームを使用して取り付けられる<ref name="kibo sengai jikkensouchi"/><ref name="jaxas 037"/>。 |
|||
船外実験プラットフォーム以外の曝露実験方法もあり、きぼうロボットアームで実験装置を把持したまま実験・観測を行う「親アーム先端設置型」(2015年6月の「Free-Space PADLES実験」<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/20150603_free-space_padles.html|title=我が国独自の線量計で、「きぼう」船外で初めて宇宙放射線環境モニタリング実験を開始(Free-Space PADLES実験):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2015-06-03|accessdate=2019-01-04}}</ref>、2018年10・11月の「ループヒートパイプラジエーター(Loop Heat Pipe Radiator:LHPR)技術実証実験」など<ref>{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-7/lhpr/index.html|title=国際競争力ある次世代静止通信衛星の実現に必要な熱制御技術の軌道上実証実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-11-19|accessdate=2019-01-04}}</ref>)、きぼうロボットアームで小型衛星を放出する「親アーム放出型」(2012年10月から始まった小型衛星放出機構(JEM Small Satellite Orbital Deployer:J-SSOD)を用いた超小型衛星の放出事業)、きぼうエアロックの移動テーブルに実験装置を取り付けて船外に伸展した状態のまま実験・観測を行う「エアロック設置型」の3つである<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/JFE_HDBK_all.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=3.2.4 船外実験プラットフォーム以外の曝露宇宙環境利用. JAXA|date=2010-09|accessdate=2019-01-04}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/participation/application/documents/utiliz_theme/kanijikken.pdf|title=「きぼう」船外利用における簡易利用実験手段の概要|publisher=JAXA|date=2012-04|accessdate=2019-01-04}}</ref>。 |
|||
==== JEM曝露部搭載型共通バス機器部(APBUS) ==== |
|||
JEM曝露部搭載型共通バス機器部(Attached Payload BUS for Kibo Exposed Facility Payload:APBUS)は、実験機器をきぼう船外実験プラットフォームに設置する際に使われる共通バス機器部で、実験機器を入れる質量や重心を最適化したミッションインタフェース構造部(Mission Interface Structure:MSTR)と、きぼうで使われる特殊な通信方法を地上での通信方法に変換し、実験機器ときぼう間の通信を中継する通信制御部(Attached Payload Remote Terminal:APRT)と、ISS特有の120Vの電圧が1系統供給されているものを、人工衛星などで使われている28Vに変圧し、複数の系統への分配も行える電力分配器(Power Distribution box for Attached Payload:PDAP)と、太陽光の有無で実験装置の温度が下がるのを防ぐため、実験装置を一定の温度に保温するヒーター制御器(Heater Control Equipment:HCE)と伸展マストに実験機器を搭載して1m以上伸展でき、地上からの遠隔操作や宇宙飛行士が手動で伸展と収納を行うことができる伸展機構(Extension Mechanism Assembly:EMA)の5つで構成されている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/apbus/|title=JEM曝露部搭載型共通バス機器部(APBUS):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2004-12-15|accessdate=2018-11-16}}</ref>。 |
|||
==== 宇宙環境計測ミッション装置 (SEDA-AP) ==== |
==== 宇宙環境計測ミッション装置 (SEDA-AP) ==== |
||
宇宙環境計測ミッション装置(Space Environment Data Acquisition equipment - Attached Payload:SEDA-AP)は、2009年の2J/Aで船外パレットに取り付けて打ち上げられ<ref name="2j/a tousaibutsu">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/2ja/mission/payload/|title=2J/Aミッション:「きぼう」日本実験棟 搭載物|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-06-10|accessdate=2019-01-22}}</ref>、EFU#9(不具合時はEFU#11を使用)<ref name="kibo sengai handbook ver1 furokuC"/>に設置されている。後にEFU#11に移設されている<ref name="kibo sengai jikkensouchi"/>。人体や人工衛星に影響を与える各種の宇宙環境を計測する。3年間の計測を行う予定で、8種類もの機器で宇宙環境を計測するため宇宙の[[百葉箱]]と形容されている。JEM曝露部搭載型共通バス機器部(APBUS)の軌道上技術実証も目的としている。微小粒子捕獲実験装置・材料曝露実験装置 (MPAC/SEED) は2010年4月にスペースシャトル ([[STS-131]]) で回収された<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/seda_ap/mpac_seed_collect.html|title=「きぼう」日本実験棟の船外実験プラットフォームに搭載しているMPAC&SEEDの回収作業が行われました。:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2010-04-10|accessdate=2019-01-19}}</ref>。SEDA-AP本体はHTVで廃棄される予定だったため<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/kibomefc/seda_ap.html|title=宇宙環境計測ミッション装置(SEDA-AP)|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2004-12-15|accessdate=2018-12-28}}</ref> ISSに残されたままだったが、2018年12月21日にカナダアーム2によりISSから軌道上に廃棄されており、数年後に大気圏へ再突入する予定となっている<ref name="kibo seda-ap haiki">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/seda_ap/seda-ap_disposal.html|title=きぼう船外設置の宇宙環境計測ミッション装置(SEDA-AP)をISSから廃棄しました:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2004-12-15|accessdate=2018-12-28}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/seda_ap/|title=宇宙環境計測ミッション装置(SEDA-AP):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-12-21|accessdate=2018-12-28}}</ref>。 |
|||
2009年の2J/Aで、船外パレットに取り付けて打ち上げられた。人体や人工衛星に影響を与える各種の宇宙環境を計測する。3年間の計測を行う予定。微小粒子捕獲実験装置・材料曝露実験装置 (MPAC/SEED) はスペースシャトル ([[STS-131]]) で回収された。SEDA-AP本体は将来HTVで廃棄される予定(未定:当面は軌道上に残したままにする)。 |
|||
* [[中性子]]モニタ (NEM) |
* [[中性子]]モニター (Neutron Monitor:NEM) - 中性子の計測を行う。 |
||
* [[重イオン]]計測装置 (HIT) |
* [[重イオン]]計測装置 (Heavy Ion Telescope:HIT) - 重イオン(Li-Fe)の粒子別エネルギー分布の計測を行う。 |
||
* [[プラズマ]]計測装置 (PLAM) |
* [[プラズマ]]計測装置 (Plasma Monitor:PLAM) - 宇宙空間のプラズマの密度と電子温度の計測を行う。 |
||
* [[高エネルギー天文学|高エネルギー]]軽粒子モニタ (SDOM) |
* [[高エネルギー天文学|高エネルギー]]軽粒子モニター (Standard Dose Monitor:SDOM) - [[電子]]、[[陽子]]、[[アルファ線]]等の高エネルギー軽粒子の粒子別エネルギー分布の計測を行う。 |
||
* 原子状酸素モニタ (AOM) |
* 原子状酸素モニター (Atomic Oxygen Monitor:AOM) - ISS周回軌道上の原子状酸素量の計測を行う。 |
||
* 電子部品評価装置 (Electronic Device Evaluation Equipment:EDEE) - きぼうにある電子部品の宇宙放射線によるシングルイベント現象(宇宙放射線粒子の入射で、電子部品の回路が破損したり、一時的な誤動作が起きる現象)や劣化の計測を行う。 |
|||
* 電子部品評価装置 (EDEE) |
|||
* 微小粒子捕獲実験装置 (MPAC) |
* 微小粒子捕獲実験装置 (Micro-Particles Capturer:MPAC) - ISS周回軌道上に存在する微小粒子を捕獲し、地上へ回収した後、粒子の大きさ・組成・衝突エネルギー等を調べる。[[STS-131]]で回収済み。 |
||
* 材料曝露実験装置 (Space Environment Exposure Device:SEED) - 熱制御材料や固体潤滑剤等といった宇宙用材料を直接宇宙空間に曝す装置で、地上へ回収した後、宇宙用材料の劣化の度合いを調べる。STS-131で回収済み。 |
|||
* 材料曝露実験装置 (SEED)(STS-131で回収済み) |
|||
==== 全天X線監視装置 (MAXI) ==== |
==== 全天X線監視装置 (MAXI) ==== |
||
{{Main|全天X線監視装置}} |
{{Main|全天X線監視装置}} |
||
2009年の2J/Aで |
全天X線監視装置(Monitor of All-sky X-ray Image:MAXI)は、2009年の2J/Aで船外パレットに取り付けて打ち上げられ<ref name="2j/a tousaibutsu"/>、EFU#1(不具合時はEFU#5を使用)<ref name="kibo sengai handbook ver1 furokuC">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/participation/application/documents/ef02/handbook.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=初版 付録C JEM曝露部搭載実験装置の概要について. JAXA|date=2006-10|accessdate=2018-12-28}}</ref>に設置されている。広視野の[[X線]]観測装置を備えて、ISSの公転により90分間隔で全天のX線天体1,000個超を撮影し、X線の強度変化や突発的な[[天文現象]]の発生を発見する<ref>{{Cite web|和書|url=http://iss.jaxa.jp/kiboexp/equipment/ef/maxi/|title=全天X線監視装置(MAXI):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-10-18|accessdate=2018-11-17}}</ref>。 |
||
==== 超伝導サブミリ波リム放射サウンダ (SMILES) ==== |
==== 超伝導サブミリ波リム放射サウンダ (SMILES) ==== |
||
{{main|超伝導サブミリ波リム放射サウンダ}} |
{{main|超伝導サブミリ波リム放射サウンダ}} |
||
超伝導サブミリ波リム放射サウンダ(Superconducting Submillimeter-Wave Limb-Emission Sounder:SMILES)は、2009年9月に[[HTV技術実証機|HTV初号機]]で打ち上げられ<ref>{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-1/payload/|title=宇宙ステーション補給機(HTV) HTV-1 搭載品|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-08-27|accessdate=2019-01-22}}</ref>、船外実験プラットフォームのEFU#3(不具合時はEFU#5)<ref name="kibo sengai handbook ver1 furokuC"/>に設置された。成層圏の大気に含まれる微量な物質が放射する[[テラヘルツ波|サブミリ波]]を計測し、[[オゾン層]]および関連する化学物質の観測を行う<ref name="jaxa smiles"/>。SMILESは2010年4月に、サブミリ波受信系の一部の機器が故障したため観測運用は出来なくなった<ref name="jaxa smiles">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/smiles/|title=超伝導サブミリ波リム放射サウンダ(SMILES):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2015-06-18|accessdate=2018-11-17}}</ref><ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2010/04/20100423_smiles_j.html|title=超伝導サブミリ波リム放射サウンダ(SMILES)の観測中断について|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2010-04-23|accessdate=2010-04-23}}</ref>。2011年1月19日に復旧を断念し運用を終了したが<ref name="monbu smiles 20110119">{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/uchuu/016/gijiroku/__icsFiles/afieldfile/2011/02/02/1301018_1.pdf|title=SMILESの観測ミッション終了と今後の運用について|publisher=文部科学省|date=2011-01-19|accessdate=2018-12-09}}</ref>、稼働していた半年分の大気観測データは得られており、また2014年3月まで行われた、SMILESに搭載されている小型長寿命化した機械式冷凍機による極低温冷却の技術実証による温度変化の特性データも得られている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/smiles/seika/index.html|title=超伝導サブミリ波リム放射サウンダ(SMILES)の成果:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2015-05-14|accessdate=2018-11-17}}</ref>。その後、2015年9月にHTV5号機で回収され大気圏再突入時に廃棄されている<ref name="htv-5 presskit 5-16">{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-5/library/presskit/htv5_presskit_b_150821.pdf|title=宇宙ステーション補給機「こうのとり」5 号機 (HTV5)ミッションプレスキット|publisher=5-16. JAXA|date=2015-08-21|accessdate=2018-12-28}}</ref> |
|||
2009年に、[[HTV技術実証機|HTV初号機]]で打ち上げて設置された。成層圏の大気に含まれる微量な物質が放射する[[テラヘルツ波|サブミリ波]]を計測し、[[オゾン層]]および関連する化学物質の観測を行う。SMILESは2010年4月に、サブミリ波受信系の一部の機器が故障したため、観測運用は出来なくなった<ref>{{cite news | title =超伝導サブミリ波リム放射サウンダ(SMILES)の観測中断について| url=http://www.jaxa.jp/press/2010/04/20100423_smiles_j.html| publisher = JAXA | accessdate = 2010-4-23}}</ref>。 |
|||
なおHTV初号機では、同時にNASAの船外実験装置HREP (Hyperspectral Imager for the Coastal Ocean (HICO) & Remote Atmospheric & Ionospheric Detection System (RAIDS) Experimental Payload) も運んで設置した。 |
|||
==== ポート共有実験装置 (MCE) ==== |
==== ポート共有実験装置 (MCE) ==== |
||
2012年に |
ポート共有実験装置(Multi-mission Consolidated Equipment:MCE)は、2012年に[[こうのとり3号機|HTV3号機]]で打ち上げられ<ref>{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-3/|title=宇宙ステーション補給機(HTV)「こうのとり」3号機(HTV3)ミッション |publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2019-01-22}}</ref>、船外実験プラットフォームのEFU#8に設置された<ref name="htv-5 presskit 5-16"/><ref name="kibo mce"/>。MCEは、比較的小型の5つのミッションをひとつの実験装置に混載し、ポートを共有して実験・観測を行う実験装置である<ref name="kibo mce">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/mce/|title=ポート共有実験装置(MCE):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2015-04-21|accessdate=2018-11-17}}</ref>。その後、2015年9月にHTV5号機で回収され大気圏再突入時に廃棄されている<ref name="htv-5 presskit 5-16"/>。 |
||
* 地球超高層大気撮像観測 (IMAP) |
|||
* 地球超高層大気撮像観測 (Ionosphere,Mesosphere,upper Atmosphere, and Plasmasphere mapping:IMAP) - 高度80km以上で発生する光学現象の大気光とプラズマ共鳴散乱光を[[可視光線]]、[[近赤外線]]、極端[[紫外線]]の3つの波長域で観測し、[[カーマン・ライン]]近辺での擾乱の物理機構を明らかにする。 |
|||
* スプライト及び雷放電の高速測光撮像センサ (GLIMS) |
|||
* スプライト及び雷放電の高速測光撮像センサー (Global Lightning and Sprite Measurement Mission:GLIMS) - CMOSカメラ、フォトメーター、VHF干渉計、VLF受信機などが搭載されており、これらを用いて雷放電と[[レッドスプライト|スプライト]]の観測を行う。 |
|||
* 宇宙インフレータブル構造の宇宙実証 (SIMPLE) |
|||
* 宇宙インフレータブル構造の宇宙実証 (Space Inflatable Membranes Pioneering Long-term Experiments: SIMPLE) - インフレータブル構造(気体の内圧を用いて風船状膜材を膨らませる超軽量の空気膜構造物)を、宇宙空間での長期運用で技術実証を行い、基礎データを取得する。 |
|||
* EVA支援ロボットの実証実験 (REX-J)<ref>[http://robotics.jaxa.jp/rexj/rexj.html REX-J]</ref> |
|||
* EVA支援ロボットの実証実験 (Robot Experiment on JEM:REXJ) - 宇宙飛行士の支援を行う「有人宇宙活動支援ロボット(Astronaut Support Robot:Astrobot)」の技術開発の一環として、伸縮自在のロボットアームとテザーを用いた空間移動の技術実証を行う<ref>{{Cite web|和書|title=REXJトップ|publisher=JAXA|archiveurl=https://web.archive.org/web/20180222051739/http://robotics.jaxa.jp/rexj/rexj.html|url=http://robotics.jaxa.jp/rexj/rexj.html|archivedate=2019-02-22|url-status=dead|url-status-date=2011-12-07|accessdate=2019-03-04}}</ref>。 |
|||
* 船外実験プラットフォーム用民生品ハイビジョンビデオカメラシステム (COTS HDTV-EF) |
|||
* 船外実験プラットフォーム用民生品ハイビジョンビデオカメラシステム (Commercial off - the - shelf high Definition TV Camera - Exposed Facility:COTS HDTV-EF) - 国際宇宙ステーションに民生品ハイビジョンビデオカメラを宇宙空間に曝しての実証実験で、地球の200km×350kmの範囲の動画・画像を撮り、宇宙線によるCMOS撮像素子の損傷具合などを調べ、市販の民生品を宇宙利用できないか検証する<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/cots_hdtv-ef.html|title=船外実験プラットフォーム用民生品ハイビジョンビデオカメラシステム(COTS HDTV-EF)による地球表面映像取得結果:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2012-09-11|accessdate=2018-11-18}}</ref>。 |
|||
==== 高エネルギー電子・ガンマ線観測装置 (CALET) ==== |
==== 高エネルギー電子・ガンマ線観測装置 (CALET) ==== |
||
{{Main|高エネルギー電子・ガンマ線観測装置}} |
{{Main|高エネルギー電子・ガンマ線観測装置}} |
||
2015年に |
高エネルギー電子・ガンマ線観測装置 (CALorimetric Electron Telescope: CALET)は、2015年にHTV5号機で打ち上げられ<ref name="htv-5 tousaihin"/>、EFU#9に設置された<ref>{{Cite web|和書|url=https://calet.jp/id213/|title=8/19 CALET こうのとり(HTV5)とともに打ち上がりました|CALET|publisher=[[早稲田大学]]理工学術院理工学研究所 鳥居研究室|date=2015-07-29|accessdate=2018-12-11}}</ref>。CALETは[[電子ボルト|TeV]]領域の高エネルギー電子線・[[ガンマ線]]を観測し、高エネルギー宇宙線の起源と加速の仕組み、宇宙線の銀河内伝播の仕組み、[[暗黒物質]]の正体などの解明を目指したものである<ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2015/10/20151022_calet_j.html|title=国際宇宙ステーション・「きぼう」日本実験棟搭載の高エネルギー電子、ガンマ線観測装置(CALET)により、世界初のテラ電子ボルト(TeV)領域の電子直接観測を開始|publisher=JAXA|date=2015-10-22|accessdate=2016-02-20}}</ref><ref>{{Cite web|和書|url=http://iss.jaxa.jp/kiboexp/equipment/ef/calet/|title=高エネルギー電子・ガンマ線観測装置(CALET):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2014-04-17|accessdate=2018-11-18}}</ref>。 |
||
* カロリメータ(CAL) |
|||
* カロリメーター(CALorimeter:CAL) - 電荷測定器(CHD)、イメージングカロリメーター(IMC)、全吸収型カロリメーター(TASC)の3つの検出器で構成されており、宇宙線の入射方向や種類を調べる<ref name="kibo calet">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/pdf/calet_20160316-6p.pdf|title=高エネルギー電子・ガンマ線観測装置 CALET|publisher=JAXA|date=2016-03-16|accessdate=2018-11-18}}</ref>。 |
|||
* ガンマ線バーストモニタ(CGBM) |
|||
* ガンマ線バーストモニター(Gamma-ray Burst Monitor:CGBM) - 硬X線観測装置(HXM)2台、軟ガンマ線観測装置(SGM)1台の3つの検出器で構成されており、CALのガンマ線観測機能を補い、ガンマ線の突発的な天体現象を観測する<ref name="kibo calet"/>。 |
|||
* 地球観測用小型赤外カメラ(CIRC) - 地上の森林火災を監視する相乗りミッション<ref>{{Cite web|url = http://circgs.tksc.jaxa.jp/about_circ.html|title = CIRCについて|accessdate = 2016-2-20|publisher = 宇宙航空研究開発機構}}</ref> |
|||
* 地球観測用小型赤外カメラ(Compact Infrared Camera:CIRC) - 地上の森林火災を監視する相乗りミッション<ref name="kibo calet"/><ref>{{Cite web|和書|url = https://circgs.tksc.jaxa.jp/about_circ.html|title = CIRCについて|accessdate = 2016-02-20|publisher = 宇宙航空研究開発機構}}</ref>。 |
|||
==== 中型曝露実験アダプター(i-SEEP) ==== |
|||
中型曝露実験アダプター(IVA-replaceable Small Exposed Experiment Platform:i-SEEP)は、2016年12月に[[こうのとり6号機|HTV6号機]]で打ち上げられ<ref>{{Cite web|和書|url=https://jda.jaxa.jp/result.php?lang=j&id=4799a45e2db181920b0a1162eaa50a84|title=JAXAデジタルアーカイブス 次世代ハイビジョンカメラ(HDTV-EF2)を搭載した中型曝露実験アダプター(i-SEEP)の船外実験プラットフォーム(EF)への設置作業の様子|publisher=JAXA|date=2017-02-08|accessdate=2019-01-25}}</ref>、EFU#5に設置された<ref name="kibo i-seep riyou boshuu2"/>。寸法50cm×70cm×35cmで重さ200kgまでの実験装置を複数搭載できるプラットフォームで、曝露環境下での搭載機器の技術実証を行う<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/i-seep/|title=中型曝露実験アダプター(i-SEEP):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-02-24|accessdate=2018-11-19}}</ref>。 |
|||
* 次世代ハイビジョンカメラ(High Definition TV Camera - Exposed Facility 2:HDTV-EF2)システム - 光学20倍ズームのハイビジョンカメラ、高感度で光学5倍の4Kカメラが搭載されており、地上から遠隔操作できる。自然災害の観測や、民生品カメラの曝露環境下での技術実証、映像の広報・教育への利活用を行う。 |
|||
* 高性能小型GPSR/Wheelユニットの軌道上実証 - 小型衛星に搭載される、民生品で作られた「GPS/Wheel Demo Unit」を曝露環境下で技術実証を行う。 |
|||
[[ファイル:ISS-45 Cubesats deployed from the ISS.jpg|thumb|right|250px|2015年9月17日に日本の小型衛星放出放出機構により放出された[[SERPENS]]。ロボットアームが把持した放出機構から射出されている様子がわかる<ref name="houshutsu rireki"/>。]] |
|||
[[ファイル:Planet Labs satellite launch from ISS.jpg|thumb|right|250px|2014年2月11日にナノラックス社製の小型衛星放出機構により放出される[[Flock-1]]の2機。]] |
|||
[[ファイル:ISS-42 Predeploy of SpinSat.jpg|thumb|right|250px|Cyclopsにより放出されるSpinSat。]] |
|||
[[ファイル:ISS-48 ExHAM and EFU at Kibo's Exposed Facility.jpg|thumb|right|250px|中央にある直方体の船外実験プラットフォーム制御装置-a(ESC-a)上部のハンドレールに取り付けられている薄い四角形の装置がExHAM2号機。左のトラニオンに設置されている装置は曝露部視覚装置(船外カメラ)で、右の円筒形のものはEFU#12。]] |
|||
==== その他の機器 ==== |
|||
* 微小重力計測装置(Microgravity Measurement Equipment:MME) - 船内実験室の微小重力計測装置(MMA)と同様の装置で、船外実験プラットフォームに3つ設置されている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/JFE_HDBK_all.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=2.1.1 微小重力. JAXA|date=2010-09|accessdate=2019-01-15}}</ref>。 |
|||
* 沿岸海域用ハイパースペクトル画像装置および大気圏/電離圏リモート探知システム実験装置(Hyperspectral Imager for the Coastal Ocean (HICO) & Remote Atmospheric & Ionospheric Detection System (RAIDS) Experimental Payload:HREP) - 2009年9月にHTV技術実証機で打ち上げられ、EFU#6に設置された<ref name="kibo hrep"/>[[アメリカ海軍]]研究所(Naval Research Laboratory:NRL)による地球観測装置<ref name="kibo-ef jasma 2011"/><ref>[https://earth.esa.int/web/eoportal/satellite-missions/i/iss-jem-hrep “ISS:JEM/Kibo-EF - HREP - eoPortal Directory - Satellite Missions ISS Utilization: JEM/Kibo-EF (Exposed Facility) experiments of USA HREP (HICO-RAIDS Experiment Payload)”]. ESA . 2019年2月26日閲覧。</ref>。沿岸海域用ハイパースペクトル画像装置(HICO)は、可視光線と近赤外線によるハイパースペクトル海洋画像システムを搭載しており、沿岸の形状や特性を計測する。大気圏/電離圏リモート探知システム(RAIDS)は、可視光線と紫外線による遠隔探知装置で、[[電離圏]]や宇宙機に働く大気ドラッグの影響分析のため、大気圏の電子密度や中性密度周縁の輪郭の計測を行う。運用はアメリカのNASAペイロード運用統合センター(POIC)から行う<ref name="kibo hrep">{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-1/payload/hrep/|title=沿岸海域用ハイパースペクトル画像装置および大気圏/電離圏リモート探知システム実験装置(HREP)|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2009-09-02|accessdate=2018-12-28}}</ref>。2018年7月13日に、カナダアーム2で回収するため一時的に船内保管室外部天頂面にある装置交換機構(EFU)に移され、その後ドラゴン宇宙船15号機([[スペースX CRS-15]]、SpX-15)に収容され廃棄されている<ref name="jaxa archives HREP">{{Cite web|和書|url=https://jda.jaxa.jp/result.php?lang=j&id=a18b5e7cc31f7882cfbae94fccd1582d|title=JAXAデジタルアーカイブス 船内保管室(ELM-PS)の装置交換機構(EFU)に取り付けられた沿岸海域用ハイパースペクトル画像装置および大気圏/電離圏リモート探知システム実験装置(HREP)|publisher=JAXA|date=2018-07-13|accessdate=2018-12-28}}</ref><ref>{{Cite web|url=https://www.nasa.gov/sites/default/files/atoms/files/iss_nac_aug_2018_final_update.pdf|title=HEO NAC International Space Station Status|publisher=33ページ目. [[NASA]]|date=2018-08|accessdate=2019-01-13}}</ref>。 |
|||
* 小型衛星放出機構(JEM Small Satellite Orbital Deployer:J-SSOD) - 2012年10月にHTV3号機で打ち上げられた。[[CubeSat]](1Uサイズのもので、1Uは縦・横・長さが10cm角のもの)や50kg級[[超小型衛星]](55×55×35cm)を軌道に放出する一連の仕組みのこと。「衛星搭載ケース」に格納した状態で[[無人宇宙補給機]]でISSに運び、「親アーム先端取付型実験プラットフォーム(Multi-Purpose Experiment Platform:MPEP)」に設置し、きぼうエアロックのスライドテーブルに取り付け、衛星放出口を塞いでいるローンチカバーを外して、RBFピンがある場合は取り外し、各衛星ごとにアクセスウィンドウカバーを組み付け、これをきぼうのエアロックから船外に出してロボットアームで把持し、放出地点に移動した後、ISS進路の反対方向の斜め下45度に向けてバネを使った分離機構で秒速1.1m-1.7m程度で放出する。放出された衛星はISSと同じ軌道傾斜角51.6度で、ISSとの衝突を避けるためISSより低い軌道を周る<ref name="jssod kibo">{{Cite web|和書|url=http://iss.jaxa.jp/kiboexp/equipment/ef/jssod/|title=小型衛星放出機構(J-SSOD):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-11-02|accessdate=2018-11-19}}</ref><ref name="mynavi singata jssod">{{Cite web|和書|url=https://news.mynavi.jp/techplus/article/20161111-nanosat_jaxa/|title=JAXAがHTV6搭載の超小型衛星7機を公開 - 強化した新型放出機構を初使用|publisher=[[マイナビニュース]]|date=2016-11-11|accessdate=2018-11-19}}</ref><ref name="hoshide jssod">{{Cite web|和書|url=https://iss.jaxa.jp/iss/jaxa_exp/hoshide/news/120924.html|title=星出宇宙飛行士、小型衛星放出機構(J-SSOD)を設置:JAXA宇宙飛行士によるISS長期滞在|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2012-09-24|accessdate=2018-11-20}}</ref><ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2011/06/20110615_sac_smallsat.pdf|title=「きぼう」からの小型衛星放出実証ミッションに係る搭載小型衛星の選定結果について|publisher=JAXA|date=2011-06-15|accessdate=2018-11-23}}</ref><ref>{{Cite web|和書|url=http://iss.jaxa.jp/user/pdf/jem_handbook.pdf|title=JEM ペイロードアコモデーションハンドブック - Vol. 8 - 超小型衛星放出インタフェース管理仕様書|publisher=JAXA|date=2014-04|accessdate=2018-12-28}}</ref>。{{Main|きぼう#小型衛星放出事業}}なお、2019年1月に打ち上げられた[[イプシロンロケット]]4号機に、このJ-SSODの技術を応用して開発されたキューブサット放出装置(Epsilon Small Satellite Orbital Deployer:E-SSOD)が搭載されている<ref>{{Cite web|和書|url=https://fanfun.jaxa.jp/topics/detail/13768.html|title=4号機の新規開発品について|ファン!ファン!JAXA!|publisher=JAXA|date=2018-12-28|accessdate=2019-02-12}}</ref><ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2018/12/files/20181219_kakushin.pdf|title=革新的衛星技術実証1号機について|publisher=JAXA|date=2018-12-19|accessdate=2019-02-12}}</ref>。 |
|||
* ナノラックス小型衛星放出機構(NanoRacks CubeSat Deployer:NRCSD{{enlink|NanoRacks CubeSat Deployer|a=on}}) - 日本の小型衛星放出機構(JEM Small Satellite Orbital Deployer:J-SSOD)の成功を見て、その有用性に着目したアメリカのナノラックス社が商業利用を目的に開発した大型の小型衛星放出機構で、6U分の衛星搭載ケースが8本の計48U分の衛星放出能力を持っている<ref name="kibo NRCSD"/><ref name="kogata houshutsu"/>。2018年5月16日現在、180機が放出されている<ref name="jssod 48u"/>。ナノラックス社は50kg級衛星とCubeSatの両方に対応したKaber小型衛星放出機構(NanoRacks Kaber Microsat Deployer)も開発しており<ref name="yui iss taizai 4-19">{{Cite web|和書|url=https://iss.jaxa.jp/iss/jaxa_exp/yui/material/yui_presskit_b.pdf|title=油井宇宙飛行士 ISS長期滞在プレスキット|publisher=4-19ページ目. JAXA|date=2015-10-07|accessdate=2018-11-20}}</ref>、最大24U分の大きさで最大82kgまでの衛星に対応できる<ref>{{Cite web|url=http://nanoracks.com/products/iss-microsat-deployment/|title=MicroSat Deployment from the ISS|Kaber Satellite Deployer in LEO|publisher=NanoRacks LLC|accessdate=2019-01-04}}</ref>。 |
|||
* ナノラックス船外プラットフォーム(NanoRacks External Platform:NREP) - アメリカのナノラックス社が開発したものでEFU#4に設置されており、4つのスロットに最小1U(10cm四方)から最大58cm×57cm×26cm・35kgまでの実験試料等を入れ曝露実験を行い回収も可能となっている<ref name="kibo NREP">{{Cite web|和書|url=https://www.jamss.co.jp/iss/img/pdf/experiment2.pdf|title=「きぼう」運用・利用 「きぼう」有償利用 NanoRacks ISS利用サービス 宇宙ステーション外実験 NanoRacks曝露実験サービス|publisher=有人宇宙システム株式会社|accessdate=2018-12-28}}</ref>。 |
|||
* サイクロップス(Space Station Integrated Kinetic Launcher for Orbital Payload Systems:SSIKLOPS、Cyclops) - NASAが開発した小型衛星放出機構<ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/news/cyclops/#.U1cL3_ldXy0|title=Meet Space Station’s Small Satellite Launcher Suite | NASA|publisher=NASA|date=2014-03-03|accessdate=2018-11-20}}</ref>。きぼうロボットアームの先端に取り付けられた子アーム(Small Fine Arm:SFA)で放出機構を把持する仕組みで、2014年11月29日に、直径56cmで重さ57kgの球体状の衛星である[[SpinSat]]の放出に成功している<ref name="kibo NRCSD"/><ref name="yui iss taizai 4-19"/><ref name="eisei houshutsu mineika"/>。 |
|||
* キャッツ(Cloud-Aerosol Transport System:CATS) - 2015年1月10日に[[ドラゴン (宇宙船)|ドラゴン宇宙船]]5号機([[スペースX CRS-5]]、SpX-5)によって打ち上げられ、同1月22日<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/plan/status/index_16.html|title=利用状況と今後の予定:「きぼう」での実験|publisher=2015年1月28日. JAXA宇宙ステーション・きぼう 広報・情報センター|date=2015-03-12|accessdate=2019-01-13}}</ref>にEFU#3に設置されたアメリカの船外実験装置。大気中の塵、煙、エアロゾルやその他微粒子などの汚染の組成や分布、位置を測定するように設計された[[LIDAR]]リモートセンシング装置で、最低6か月-最長3年程度の運用が見込まれている<ref>{{cite web|url=https://cats.gsfc.nasa.gov/|title=Cloud-Aerosol Transport System (CATS)|publisher=NASA|accessdate=2018-12-28}}</ref><ref>{{cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/1037.html|title=NASA - Cloud-Aerosol Transport System|publisher=NASA|accessdate=2018-12-28}}</ref><ref>{{cite web|url=http://www.dailymail.co.uk/sciencetech/article-2558504/ISS-laser-cannon-like-Death-Star-Star-Wars.html|title=ISS to get Cloud Aerosol Transport System, a laser cannon - Daily Mail Online|work=Mail Online|accessdate=2018-12-28}}</ref>。2017年10月30日に、オンボード電源及びデータシステムに障害が発生し機能が停止している<ref>{{cite web|url=https://www.nasa.gov/feature/goddard/2017/nasa-s-cats-concludes-successful-mission-on-space-station|title=NASA’s CATS Concludes Successful Mission on Space Station|publisher=NASA|date=2017-12-07|accessdate=2019-01-13}}</ref><ref>{{cite web|url=https://cats.gsfc.nasa.gov/|title=NASA’s CATS Concludes Successful Mission on Space Station|publisher=Operation Status. NASA|date=2017-11-14|accessdate=2019-01-13}}</ref>。2018年3月27日にEFU#8に移設されている<ref name="kibo sengai cats spaceref">{{Cite web |url=https://blogs.nasa.gov/stationreport/2018/03/page/4/ |title=ISS On-Orbit Status Report ISS Daily Summary Report – 3/27/2018 |publisher=NASA |date=2018-03-27 |accessdate=2024-07-04}}</ref>。 |
|||
* アイスクリーム、又はクリーム(Cosmic Ray Energetics and Mass for the International Space Station:ISS-CREAM、又はCREAM) - 2017年8月15日に、ドラゴン宇宙船12号機([[スペースX CRS-12]]、SpX-12)によって打ち上げられ、同8月22日にEFU#2に設置されたアメリカの高エネルギー宇宙線観測装置<ref name="jaxa dragon-spx12 iss-cream"/>。前身のCREAMは、2004年から2016年までに7回にわたって計191日間[[南極]]上空でバルーン観測を行ったが、地上での観測では大気の影響や観測期間の短さもあり、より高エネルギーの宇宙線を観測するには宇宙空間で長期間の観測が必要であった。これによりISS用に開発されたのが本機である。1PeVまでの宇宙線を観測でき、3年以上の観測を予定している。ISSには同趣旨で開発された[[アルファ磁気分光器#AMS-02|AMS-02]]とCALETも設置されている<ref name="jaxa dragon-spx12 iss-cream">{{Cite web|和書|url=https://iss.jaxa.jp/iss/flight/dragon_spx12/overview_spx12.pdf|title=米国SpaceX CRS-12 (SpX-12)のミッション概要|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-09-20|accessdate=2018-12-28}}</ref><ref>{{Cite web|和書|url=http://www.sed.co.jp/contents/news-list/2017/08/0822-1.html|title=ドラゴン補給機の12号機がISSに到着|publisher=[[宇宙技術開発]]株式会社|date=2017-08-22|accessdate=2018-12-28}}</ref>。 |
|||
* エコストレス(ECOsystem Spaceborne Thermal Radiometer Experiment on Space Station:ECOSTRESS) - 2018年6月29日に、ドラゴン宇宙船15号機([[スペースX CRS-15]]、SpX-15)によって打ち上げられ、同7月5日にEFU#10に設置されたアメリカの熱ラジオメーター(放射計)<ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/flight/dragon_spx15/overview_spx15.pdf|title=米国SpaceX CRS-15 (SpX-15)のミッション概要|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-07-03|accessdate=2019-01-11}}</ref>。地球表面を熱赤外線で測定し、地球上の水量などの状態の変化が生物や炭素循環、農業などにどのような影響を与えるかを調べる<ref name="jpl ecostress 180706">{{Cite web|和書|url=https://www.jpl.nasa.gov/news/ecostress-launches-to-space-station-on-spacex-mission|title=ECOSTRESS Successfully Installed on Space Station|publisher=[[ジェット推進研究所]]|date=2018-07-06|accessdate=2019-01-11}}</ref><ref>{{Cite web|和書|url=https://www.discoverychannel.jp/0000027328/|title=ISSへの補給宇宙船、様々な最新実験機器を積み飛び立つ|publisher=[[ディスカバリーチャンネル]]|date=2018-07-03|accessdate=2019-01-11}}</ref><ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/experiments/2141.html|title=ECOsystem Spaceborne Thermal Radiometer Experiment on Space Station|publisher=NASA|date=2018-08-01|accessdate=2019-01-11}}</ref>。 |
|||
* ジェダイ(Global Ecosystem Dynamics Investigation:GEDI) - アメリカの地球観測用レーザーで、2018年12月13日にEFU#6に設置されている<ref name="kibo yotei 181219">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/181219.html|title=「きぼう」の利用状況と今後の予定:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-12-19|accessdate=2018-12-28}}</ref><ref name="GEDI instrument">{{Cite web|url=https://gedi.umd.edu/instrument/instrument-overview/|title=Instrument Overview - GEDI|publisher=GEDI Ecosystem Lidar |accessdate=2018-12-28}}</ref>。 |
|||
* 簡易曝露実験装置(Exposed Experiment Handrail Attachment Mechanism:ExHAM) - 上面7個、側面13個の計20個の実験サンプル(縦・横100mm、奥行き20mm)を搭載できる、直方体の形をした曝露実験用の装置である<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/170927_exham.html|title=「きぼう」利用 簡易曝露実験装置(ExHAM)有償利用テーマ通年募集について:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-11-16|accessdate=2018-12-26}}</ref>。 |
|||
:2015年5月に直方体の形をしたロボティクス対応軌道上交換ユニット(R-ORU)になっているサバイバル電力分配箱(SPB)上部のハンドレールに1号機が、次いで2015年11月に同じくR-ORUになっている船外実験プラットフォーム制御装置-a(ESC-a)上部のハンドレールに2号機と、船外実験プラットフォームの先端にあるEFU#12の両脇に設置されている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=4.3 船外実験プラットフォーム. JAXA|date=2008-04|accessdate=2018-12-26}}</ref><ref>{{Cite web|和書|url=https://doi.org/10.14822/kjsass.66.5_141 |title=簡易曝露実験装置(ExHAM)を支えるロボティクス技術|publisher=[[日本航空宇宙学会]]|journal = 日本航空宇宙学会誌 |volume = 66 |issue = 5 |doi = 10.14822/kjsass.66.5_141 |pages = 141-147|date=2018-05|accessdate=2018-12-28}}</ref>。 |
|||
:今までは搭乗員による船外活動が必要であったこの種の実験は、この装置ではロボットアームときぼうのエアロックを使って実験試料の回収が容易なため船外活動は不要である。実験を終了した試料は地上へ回収できる<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/equipment/ef/exham/|title=簡易曝露実験装置(ExHAM):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-03-12|accessdate=2018-11-20}}</ref>。 |
|||
==== 計画中 ==== |
==== 計画中 ==== |
||
以下の実験・観測装置が計画されている。打ち上げはHTVを利用する。 |
以下の実験・観測装置が計画されている。打ち上げはHTVを利用する。 |
||
; [[2017年]](予定)<ref>{{cite news |
|||
* 超高エネルギー宇宙線望遠鏡(Extreme Universe Space Observatory:EUSO) - 世界16か国が参加する国際プロジェクトで、当初は2017年の打ち上げを予定していたが<ref>{{cite news | title = Space station to host new cosmic ray telescope | url = http://news.uchicago.edu/article/2013/03/11/space-station-host-new-cosmic-ray-telescope | publisher = [[シカゴ大学]] | date = 2013-03-11 | accessdate = 2013-04-11}}</ref>、2018年11月現在、計画は遅れている。きぼうには超高エネルギー宇宙線を観測する超広角望遠鏡が設置される予定である(JEM-EUSO)<ref>{{Cite web|和書|url=http://www.riken.jp/~/media/riken/pr/publications/annual_report/pr_riken-2018-jp.pdf|title=広報誌 RIKEN 2018|publisher=16ページ目. [[国立研究開発法人]][[理化学研究所]]|date=2018-06|accessdate=2018-11-20}}</ref>。 |
|||
| title = Space station to host new cosmic ray telescope |
|||
{{Main|EUSO計画}} |
|||
| url = http://news.uchicago.edu/article/2013/03/11/space-station-host-new-cosmic-ray-telescope |
|||
| publisher = シカゴ大学 | date = 2013-03-11 | accessdate = 2013-04-11 |
|||
}}</ref> |
|||
* 超高エネルギー宇宙線望遠鏡([[EUSO計画]]) |
|||
== 運用 == |
== 運用 == |
||
=== 運用管制 === |
|||
[[ファイル:JAXA Kibo 002.jpg|thumb|right|200px|無重量環境プール内のきぼう実験モジュールの模型]] |
|||
ISSでは、「参加主体は、自己が提供する要素を運用する責任を有する。」としているIGA第10条とMOU第9条2a項により<ref name="iss monbu 20140929"/>、実験棟を持っている国はそれぞれ独自に自国の実験棟を管制しており、日本はきぼうの管制を受け持っている<ref name="jaxas 065">{{Cite web|和書|url=https://fanfun.jaxa.jp/c/media/file/media_jaxas_jaxas065.pdf|title=宇宙航空の最新情報マガジン JAXA's No.065|publisher=JAXA|date=2016-07-01|accessdate=2018-11-13}}</ref>。きぼうの管制は、[[筑波宇宙センター]]にある宇宙ステーション総合推進センター (Space Station Integration and Promotion Center: SSIPC) の宇宙ステーション運用棟で行われる<ref name="kibo tsukuba unyou kansei shisetsu">{{Cite web|和書|url=https://iss.jaxa.jp/ssip/index.html|title=運用管制施設|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2015-03-02|accessdate=2019-01-25}}</ref>。運用管制施設はこの他に、宇宙ステーション試験棟、宇宙実験棟、宇宙飛行士養成棟、無重量環境試験棟があり、宇宙ステーション運用棟を含め計5施設で構成されている<ref name="kibo tsukuba unyou kansei shisetsu"/>。 |
|||
=== 管制 === |
|||
{{節スタブ}} |
|||
きぼうの管制は、[[筑波宇宙センター]]にある宇宙ステーション総合推進センター (Space Station Integration and Promotion Center: SSIPC) の宇宙ステーション運用棟で行われる。SSIPCでは、きぼう自体の運用を行う「システム運用」と、搭載している実験装置の運用を行う「実験運用」が行われる。 |
|||
SSIPCの宇宙ステーション運用棟では、きぼう自体の運用を行う「システム運用」を1階の運用管制室で、搭載している実験装置の運用を行う「実験運用」が1階のユーザー運用エリア(User Operations Area: UOA)で、きぼうの運用計画立案も1階で行われ、4階の運用リハーサル室で管制員の訓練や統合リハーサル、NASAとの共同統合訓練が行われる<ref name="kibo unyoutou">{{Cite web|和書|url=https://iss.jaxa.jp/ssip/ssip_ssof.html|title=運用管制施設 宇宙ステーション運用棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-03-21|accessdate=2018-11-13}}</ref><ref name="kibo handbook unnyoukansei">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」 ハンドブック|publisher=5.3 「きぼう」の運用管制. JAXA|date=2008-04|accessdate=2018-11-15}}</ref>。2008年3月11日午前10時に、きぼうの運用管制室が稼働開始しており、きぼうの運用を終えるまで24時間体制で運用が行われる<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1ja/news/mcr_start.html|title=「きぼう」運用管制室が稼働開始:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-03-11|accessdate=2019-01-22}}</ref><ref>{{Cite web|和書|url=http://www.asahi.com/special/space/kibou/TKY200803110120.html|title=つくばで「きぼう」運用管制室オープン|publisher=朝日新聞|date=2008-03-11|accessdate=2019-01-22}}</ref>。2016年8月8日に、きぼう運用管制室が一新されている<ref name="kibo kansei team"/>。 |
|||
* システム運用 |
|||
SSIPC内にある運用管制室で、3交代24時間体制で監視を行っており、指揮を執るフライトディレクタと運用管制員は総勢50名以上が勤めている。きぼうのシステムを監視するほか、利用計画や補給物資の輸送計画、不具合発生時の修理計画などの立案も担っている、 |
|||
きぼうとSSIPCの通信は、ISSの通信システムから[[TDRS]]、[[ジョンソン宇宙センター]]を経由して24時間行われる。きぼうに搭載される衛星間通信システムは、中継する衛星がこだま1機しかなく連続通信はできないため、大量のデータを送受信する場合などに使われる。 |
|||
初めてきぼうの運用管制が行われたのは、きぼう船内保管室などのISSへの運搬と設置を行った[[STS-123]]の国際宇宙ステーション組立てミッション(1J/A)からで<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1ja/support/|title=地上で支える人々(1J/Aミッション)|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-03-21|accessdate=2018-11-13}}</ref>、きぼうはインクリメント17(2008年2月-9月)からの運用開始となった。きぼう運用管制チームは、普段はきぼうの管制を行っているが、[[宇宙ステーション補給機|HTV]](こうのとり)がISSに係留している間は、HTVの管制も行っている<ref>{{Cite web|和書|url=https://twitter.com/JAXA_JFLIGHT/status/1059727084334006272|title=JAXAきぼうフライトディレクタ (@JAXA_JFLIGHT)さん | Twitter|publisher=JAXA Twitter|date=2018-11-06|accessdate=2018-11-24}}</ref>。 |
|||
* 実験運用 |
|||
実験装置を搭載したユーザは、運用管制室に隣接したユーザエリアで実験の模様をモニタし、ISSと連絡を取り合うことができる。 |
|||
=== きぼうの運用システム === |
|||
きぼうの運用システムの構成要素は以下の7つからなっている<ref name="kibo unyoutou"/><ref name="kibo handbook unnyoukansei"/><ref name="kibo unyoukansei"/>。 |
|||
* 運用管制システム(Operations Control System:OCS) - きぼうや搭載実験装置の監視・制御・運用支援、実運用計画の立案、データ管理、管制ネットワーク運用管理、地上要員の訓練などを行う。 |
|||
* 運用利用計画立案システム - 電力や通信、搭乗員活動時間などのリソースをISS参加国の間で配分する運用計画を長期・詳細の2つに取りまとめる。 |
|||
* 搭乗員運用訓練システム - 搭乗員のきぼう運用にかかる知識、技能、操作手順の訓練を行う。 |
|||
* 運用技術支援システム - きぼうと搭載実験装置の運用性、安全性、物理的適合性の確認を行う「エレメントインテグレーションシステム」、きぼうに搭載されているソフトウェアや運用データファイルを作成、検証、管理する「フライトソフトウェア/運用データファイル(ODF:Operations Data File)生成システム」、きぼうの機器が故障した場合に、各機器の電気的・機械的な状態の模擬実験を行う「エンジニアリングシミュレーター」、無重量環境試験設備にてきぼうの実物大模型を用いた運用手順の確認を行う「きぼうの水中モックアップ」などで構成されている。 |
|||
* 保全補給運用管理システム - きぼうの部品交換や消耗品の補給、修理の管理を行う。 |
|||
* 運用ネットワークシステム - 筑波宇宙センターとジョンソン宇宙センターの間で、きぼうのデータの送受信を行う。 |
|||
* ケネディ宇宙センター射場支援装置システム - 補給品の打ち上げ時に射場作業の支援を行う。 |
|||
=== システム運用 === |
|||
SSIPC内にある運用管制室で、運用管制チームは最大10ポジションの3交代シフト(8:00-17:00、16:00-1:00、0:00-9:00<ref name="kanai flight director"/>)の24時間体制で365日監視を行っており<ref>{{Cite web|和書|url=https://fanfun.jaxa.jp/c/media/file/media_jaxas_jaxas018.pdf|title=JAXA's 018|publisher=JAXA|date=2008-02-01|accessdate=2018-11-23}}</ref>、指揮を執るフライトディレクターと運用管制員は総勢50名以上が勤めているが、常駐している運用管制官の1シフト最小構成は5人のみで、多くても15人程度と効率的な運用がなされている<ref name="kibo unyoutou"/><ref name="kanai flight director">{{Cite web|和書|url=https://iss.jaxa.jp/iss/jaxa_exp/kanai/material/kanai_press_mission_02.pdf|title=金井飛行士長期滞在ミッション担当フライトディレクタ概要説明|publisher=JAXA|date=2017-08-24|accessdate=2018-11-23}}</ref><ref name="jaxas 070">{{Cite web|和書|url=https://fanfun.jaxa.jp/c/media/file/media_jaxas_jaxas070.pdf|title=JAXA's No.070|publisher=JAXA|date=2017-10|accessdate=2018-10-22}}</ref>。きぼうのシステムを監視するほか、利用計画や補給物資の選定や輸送計画、不具合発生時の修理計画などの立案も担っており、不具合対応の運用シミュレーション訓練も行い練度向上に努めている<ref name="kibo kansei team">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/system/operation/team/|title=「きぼう」日本実験棟 運用管制チーム|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-01-13|accessdate=2018-11-13}}</ref><ref name="kibo unyoutou"/>。また、ISS全体を統括しているのはNASAのフライトディレクターであり、予定の変更が必要な場合はNASAのフライトディレクターと交渉する必要があるため、筑波の運用管制室からは[[NASA]]のジョンソン宇宙センターにある[[ミッションコントロールセンター]](MCC-H)を映すことができ、かつ常時NASAのフライトディレクターと連絡が付くようになっている<ref name="jaxas 065"/>。 |
|||
きぼうとSSIPCの通信は、ISSの通信システムから[[TDRS]]、[[ジョンソン宇宙センター]]、ホワイトサンズ地上局(White Sands Complex:WSC)を経由したNASAリンク(Sバンド、kuバンド)<ref name="kibo handbook 5.3"/>で24時間行われる<ref name="kibo unyoukansei">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/system/operation/ocs/|title=「きぼう」日本実験棟 運用管制システム|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-11-24|accessdate=2018-11-13}}</ref>。当初は、日本のデータ中継技術衛星[[こだま (人工衛星)|こだま]](DRTS)とDRTS地上局を経由したJAXAリンク(Kaバンド、Sリンク)での通信も可能であったが、こだまが2017年8月5日に退役したため、現在はNASAリンクのみとなっている<ref name="kanai iss54/55 presskit"/><ref name="kibo handbook 5.3">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=5.3 「きぼう」の運用管制. JAXA|date=2008-04|accessdate=2018-11-30}}</ref><ref>{{Cite web|和書|url=http://iss.jaxa.jp/kibo/library/fact/data/pmhandbook.pdf|title=「きぼう」船内実験室利用ハンドブック|publisher=11ページ目. JAXA|date=2018-08|accessdate=2018-11-30}}</ref>。きぼうに搭載されている衛星間通信システムは、実験データの[[ダウンリンク]]<ref name="monbu jaxa kodama taieki 20171018"/><ref name="monbu nippon space history 5-4"/>と[[TDRS]]の予備回線(未使用に終わった)<ref name="monbu jaxa kodama taieki 20171018"/>として使われていた。また、NASAから実験機器の安全審査権限を委譲されており、日本は単独で「きぼう」の安全管理責任を負っている<ref name="monbu ISS seika 20140520"/>。組み立てが始まった2008年以降、重大事案や緊急事態は起きていない<ref name="jaxas 070"/>。 |
|||
=== 実験運用 === |
|||
実験運用計画は筑波宇宙センターでまとめた後、[[マーシャル宇宙飛行センター]]に送り調整を行い、最終的にISS全体の運用計画を統括しているジョンソン宇宙センターでISSの運用計画に組み入れられ、実験が行われる<ref name="kibo unyoutou"/>。きぼうでの実験は、実験運用管制チームが搭乗員の作業を支援したり、データの監視や遠隔操作で実験機器を制御し実験を行う。他にも簡素な実験機器等を使った教育文化ミッション(Education Payload Observation: EPO)<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/field/epo/pilot/|title=文化・人文社会科学利用(EPO):「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2014-01-29|accessdate=2018-11-15}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/field/epo/|title=人文・社会科学:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2018-11-15}}</ref>や宇宙飛行士の健康管理に関する医学ミッションなどの運用、更に運用の進め方・規則・手順書などの作成等も実験運用管制チームが行う<ref name="kibo jikken team">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/system/operation/plfct/|title=実験運用管制チーム:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-01-13|accessdate=2018-11-15}}</ref>。 |
|||
実際に各実験を進めるにあたって、実験運用管制チームに加え、ユーザーとなる実験テーマ提案者の代表研究者(Principal Investigator:PI)や共同研究者(Co-Investigator:CI)、代表研究者と実験運用管制員の橋渡しを行うユーザーインテグレーター(User Integrator:UI)や実験装置開発担当(Engineer)が協力して実験を行っていく<ref name="kibo jikken team"/>。また、実験装置を搭載したユーザーは、運用管制室に隣接したユーザー運用エリアで実験の模様をモニターし、適宜実験に関する指示を実験運用管制チームへ行ったり、ISSと連絡を取り合うことができる<ref name="kibo unyoutou"/><ref name="kibo jikken team"/>。 |
|||
=== 運用モード === |
|||
きぼうには4つの運用モードがあり、運用状態や各作業内容に応じて変更を行う。運用モードの変更は搭乗員や地上からの指令で行えるが、ISSの7つの運用モードと適合している必要があり(例:ロボティクス運用モードに変更する場合、ISSは外部運用モードでなくてはならない)、適合していない場合は自動的に「スタンバイモード」に変更される<ref name="kibo handbook 3.2">{{Cite web|和書|url=https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf|title=「きぼう」ハンドブック|publisher=3.2 「きぼう」運用モード. JAXA|date=2008-04|accessdate=2018-11-30}}</ref>。 |
|||
; きぼう運用モード<ref name="kibo handbook 3.2"/> |
|||
* 「標準モード」 - 搭乗員が実験を行うことができロボットアームの運用は行えない。通常はこのモードを中心に運用されている。 |
|||
* 「ロボティクス運用モード」 - ロボットアームの運用が行える。 |
|||
* 「スタンバイモード」 - 異常時に最小限のシステムで運用する。 |
|||
* 「隔離モード」 - 与圧環境に異常が生じた場合に隣のモジュールであるハーモニーとのハッチが閉じられる。このモードでは「きぼう」内に立ち入ることはできない。 |
|||
; きぼう曝露部運用モード<ref name="kibo sengai handbook ver1 2-6">{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/participation/application/documents/ef02/handbook.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=初版 2-6の表2.1.3.1-1 JEM曝露部運用モードの概要. JAXA|date=2006-10|accessdate=2019-01-29}}</ref> |
|||
* 「曝露部保存モード」 - 最少資源で曝露部システムを保存するモード。 |
|||
* 「ミッション運用モード」 - 曝露部のミッション運用を行うモード。通常はこのモードを中心に運用されている。 |
|||
* 「特殊運用モード」 - 曝露部保存モード、ミッション運用モード以外のモード。 |
|||
[[ファイル:ISS-22 Soichi Noguchi during housekeeping in the Kibo lab.jpg|thumb|right|250px|船内保守の一環で「きぼう」の掃除を行う野口聡一宇宙飛行士。(2009年12月)]] |
|||
; 国際宇宙ステーション(ISS)運用モード<ref name="kibo handbook 3.2"/><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/participation/application/documents/ef02/handbook.pdf|title=きぼう船外実験プラットフォーム利用ハンドブック|publisher=初版 1-13及び1-14. JAXA|date=2006-10|accessdate=2018-12-07}}</ref> |
|||
* 「標準モード」 - 船内保守、ペイロード運用などの時に運用されているモード。普段はこのモードを中心に運用されている。 |
|||
* 「リブーストモード」 - ISSが軌道変更(リブースト等)を行うときのモード。 |
|||
* 「微小重力モード」 - 微小重力環境で実験装置の運用を行うため、微小重力性能が適用される。 |
|||
* 「サバイバルモード」 - ISSの姿勢や電力に異常が生じるなど、搭乗員に危険が及ぶ恐れがある場合などに発動される、ISSの長期間運用を行うモード。電力、通信、排熱等のペイロード運用支援は保証されない。このモードへの移行はいつでも可能となっている。 |
|||
* 「接近モード」 - ソユーズ、プログレス、こうのとり等の他の宇宙機の接近や離脱時に運用支援を行う。 |
|||
* 「安全確実なクルーの帰還(Assured Safe Crew Return:ASCR)モード」 - 異常時に搭乗員が危機に晒され、地上への帰還を行うにあたって、ソユーズ宇宙船の離脱を支援する。このモードへの移行はいつでも可能となっている。 |
|||
* 「外部運用モード」 - 船外活動(EVA)やロボットアーム運用時等、船外での組立作業や保全作業を支援する。 |
|||
{| class="wikitable" style="text-align:center" |
|||
|+ 国際宇宙ステーション(ISS)と「きぼう」の運用モード対応表<ref name="kibo handbook 3.2"/> |
|||
! !! ISS<br />標準モード !! ISS<br />リブーストモード !! ISS<br />微小重力モード !! ISS<br />サバイバルモード !! ISS<br />接近モード !! ISS<br />ASCRモード !! ISS<br />外部運用モード |
|||
|- |
|||
! きぼう標準モード |
|||
| ○ || ○ || ○ || × || ○ || ○ || ○ |
|||
|- |
|||
! きぼうロボティクス運用モード |
|||
| ×|| × || × || × || × || × || ○ |
|||
|- |
|||
! きぼうスタンバイモード |
|||
| ○ || ○ || ○ || ○ || ○ || ○ || ○ |
|||
|- |
|||
! きぼう隔離モード |
|||
| ○ || ○ || ○ || ○ || ○ || ○ || ○ |
|||
|- |
|||
| colspan="8" | 「きぼう」運用モードがISS運用モードに対し、○は適合、×は不適合。 |
|||
|} |
|||
{| class="wikitable" style="text-align:center" |
|||
|+ きぼう曝露部運用モード対応表<ref name="kibo sengai handbook ver1 2-6"/> |
|||
|- |
|||
!rowspan="2"|曝露部運用モード |
|||
!rowspan="2"|対応するISS・きぼう運用モード |
|||
!colspan="3"|供給可能資源 |
|||
!rowspan="2"|加速度の制限 |
|||
!rowspan="2"|きぼうロボットアームによる曝露実験機器の交換 |
|||
|- |
|||
!電力 |
|||
!通信 |
|||
!熱制御 |
|||
|- |
|||
!曝露部保存モード |
|||
| サバイバルモード || × || × || × || - || × |
|||
|- |
|||
!rowspan="5"|ミッション運用モード |
|||
| 標準モード || ○ || ○ || ○ || - || × |
|||
|- |
|||
| リブーストモード || ○ || ○ || ○ || - || × |
|||
|- |
|||
| 微小重力モード || ○ || ○ || ○ || ○ || × |
|||
|- |
|||
| 接近モード || ○ || ○ || ○ || - || × |
|||
|- |
|||
| 外部運用モード || ○ || ○ || ○ || - || ○ |
|||
|- |
|||
!特殊運用モード |
|||
| ASCRモード || ○ || ○ || ○ || - || × |
|||
|- |
|||
| colspan="7" | ○は保証又は適用される、×は保証又は適用されない、-は現状未規定。<br />加速度の制限は、曝露実験機器への微小重力環境及び機械的擾乱の制約が適用される。 |
|||
|} |
|||
===インクリメントマネージャー === |
|||
インクリメントマネージャー(Increment Manager:IM)とは、インクリメント(ISSの運用期間単位で、搭乗員の交代を基準にした区切り。「ISS第45/46次長期滞在」の場合、「インクリメント45/46」となる<ref name="kanai blog 54/55">{{Cite web|和書|url=https://ameblo.jp/astro-kanai/entry-12304658025.html|title=第54次/第55次「チーム・きぼう」の紹介 その1|publisher=JAXA宇宙飛行士金井宣茂公式ブログ「宇宙、行かない?」|date=2017-08-28|accessdate=2018-11-23}}</ref><ref name="kanai iss taizai">{{Cite web|和書|url=https://iss.jaxa.jp/iss/jaxa_exp/kanai/overview/|title=金井宣茂 ISS長期滞在ミッション 長期滞在概要:JAXA宇宙飛行士によるISS長期滞在|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-06-07|accessdate=2018-11-23}}</ref>。)期間中、管制チーム・技術チーム・実験チームを含め、各インクリメントの利用計画、目標設定、運用計画の履行、危機管理、対応調整など、インクリメント担当フライトディレクターと連携し<ref name="kanai flight director"/>、きぼうが関わるミッション全体を統括するプロデューサー役を果たす<ref name="kanai blog 54/55"/><ref name="kanai iss taizai"/>。インクリメントマネージャー制度は2015年度(平成27年度)後半のインクリメント45/46から始まった<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/plan/inc5758/|title=「きぼう」での実験 利用の計画 インクリメント57/58|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-10-04|accessdate=2018-11-23}}</ref>。 |
|||
=== 管制ポジション === |
|||
きぼうの運用管制チームは、きぼう全体を統括する「きぼう運用管制チーム」(JAXA Flight Control Team:JFCT)と、きぼうでの実験などの利用を統括する「きぼう実験運用管制チーム」(Payload Flight Control Team:PLFCT)の2つから成っている<ref name="kibo kansei team"/>。 |
|||
==== きぼう運用管制チーム ==== |
|||
運用管制室での「きぼう運用管制チーム」(JAXA Flight Control Team:JFCT)の各役割と配置は以下のようになっている<ref name="kibo kansei team"/><ref name="jaxas 065"/>。 |
|||
* ExPO(Exposed Facility Payload Officer、エクスポ・エキスポ) - 最前列左右の席。曝露ペイロードオフィサー。曝露実験全体の運用を取り纏める。きぼう実験運用管制チームに属しているが、唯一運用管制室に詰めている<ref>{{Cite web|和書|url=https://ameblo.jp/astro-kanai/entry-12319837038.html|title=実験運用管制官チーム|publisher=JAXA宇宙飛行士金井宣茂公式ブログ「宇宙、行かない?」|date=2017-10-16|accessdate=2018-11-22}}</ref>。 |
|||
* CANSEI(Control and Network Systems, Electrical Power, and ICS Communication Officer、カンセイ) - 前から2列目左の席。通信・電力・管制系担当。きぼうのコンピューター、通信機器、電気・電力系機器・管制システムの状態を監視し、これらの制御を行う。 |
|||
* FLAT(Fluid and Thermal Officer、フラット) - 前から2列目右の席。熱・環境・実験支援系担当。きぼう内の環境制御のため、各装置から出る熱を制御する空調機器などの状態を監視・制御を行い、実験の支援を行う。 |
|||
* J-FLIGHT(JAXA Flight Director、ジェイフライト) - 前から3列目左の席。フライトディレクター。「きぼう運用管制チーム」と「きぼう実験運用管制チーム」を含め、「きぼう」の運用管制に関する全てを統括しており、きぼう運用の指揮を執る責任者。ISSと「きぼう」に関するあらゆる知識の習得とシミュレーション訓練に合格した後、実務経験を経て認定される<ref name="kanai flight director"/>。 |
|||
** リード・フライトディレクター(インクリメント担当フライトディレクター) - シフト毎に交代するフライトディレクターのチームの中から、各インクリメント毎にインクリメント担当フライトディレクターが選ばれる。インクリメントマネージャーと連携し、インクリメント期間中の取りまとめ役となり、きぼう運用の指揮を執る<ref name="kanai flight director"/><ref name="kanai blog 54/55"/>。 |
|||
* J-COM(JEM Communicator、ジェイコム) - 前から3列目右の席の左側。きぼう交信担当。きぼうにいる搭乗員と交信を行う。管制員が搭乗員に指示を出す場合、必ずジェイコムを通して伝えられ、交信は英語で行われる。 |
|||
* ARIES(Astronaut Related IVA and Equipment Support、アリーズ) - 前から3列目右の席の右側。船内活動支援担当。きぼう内の機器・物品などの管理や、宇宙飛行士の船内活動(Intra-Vehicular Activity:IVA)を支援する。 |
|||
* KIBOTT(Kibo Robotics Team、キボット) - 前から4列目左の席。ロボティクス・構造・機構系担当。きぼうのロボットアーム、エアロック、機構系機器を遠隔操作で運用を行う。以前は搭乗員が直接ロボットアームの運用を行っていたが、現在はKIBOTTが行っている。 |
|||
* Tsukuba GC(Tsukuba Ground Controller、ツクバジーシー) - 前から4列目右の席。きぼう地上システム担当。きぼうの運用管制システム、運用ネットワークシステムなどといった地上設備の運用・管理を行う。 |
|||
* J-PLAN(JAXA Planner、ジェイプラン) - 実運用計画担当。かつては管制室に詰めていた<ref name="hoshide taizai"/>が現在は入らない。きぼう運用計画の立案、日勤シフトで運用計画室に入り運用計画の変更・調整を行う。 |
|||
* JEM PAYLOADS(JEM Payload Officer、ジェムペイローズ) - ペイロード運用担当。かつては実験運用代表者として、唯一管制室に詰めていた<ref name="hoshide taizai"/><ref name="jaros h22 1-12,13">{{Cite web|和書|url=https://ssl.jspacesystems.or.jp/library/archives/jaros/space%20utilization%20view/h22_1.pdf|title=平成22年度JAROS宇宙環境利用の展望 第1章 「きぼう」実験運用の概要 - 「きぼう」利用の舞台裏 -|publisher=1-12,13. 一般財団法人宇宙システム開発利用推進機構|date=2011|accessdate=2019-02-08}}</ref>が現在は入らない。NASAの実験も含む<ref name="jaros h22 1-12,13"/>「きぼう」での実験実施者の窓口となり、実験運用が円滑に行われるよう支援する。かつて、実験運用管制チーム(Payload Flight Control Team:PL FCT)が「JEM PAYLOADS」の下に属していたこともあった<ref name="hoshide taizai"/>。 |
|||
* JET(JEM Engineering Team、ジェット) - 技術支援チーム、システム運用技術支援担当。管制室には入らず、バックルームに詰めている。主にきぼう開発メンバーで組織され、きぼう運用管制チームを技術面で支援を行い、きぼうのデータ評価や機能拡張機器の開発検討なども行う。 |
|||
* JAXA EVA(JAXA Extravehicular Activity、ジャクサイーブイエー) - 技術支援チーム、[[船外活動]]支援担当。管制室には入らない。日本人宇宙飛行士の船外活動(Extra-Vehicular Activity:EVA)、きぼうに関係する船外活動を技術面で支援を行う。 |
|||
* OMT(Operations Management Team、オーエムティー) - 運用管理チーム、国際間調整担当。管制室には入らない。きぼうの運用にあたって、国際間での情報収集・連絡・調整を筑波宇宙センターとジョンソン宇宙センターで行う。 |
|||
かつて存在したポジション |
|||
* SENIN(System Element Investigation and Integration Officer、センニン) - システム担当。きぼうのシステムを監視し、複数の管制ポジションにわたる作業をまとめる<ref name="hoshide taizai">{{Cite web|和書|url=https://iss.jaxa.jp/iss/jaxa_exp/hoshide/library/presskit/press_kit.pdf|title=星出宇宙飛行士 ISS 長期滞在プレスキット|publisher=付録2.5 運用管制. JAXA|date=2012-07-10|accessdate=2018-11-21}}</ref>。 |
|||
[[ファイル:STS132 Educational Event1.jpg|thumb|right|250px|きぼうで教育交信イベントを行う[[STS-132]]及び[[第23次長期滞在]]の宇宙飛行士達。]] |
|||
==== 実験運用管制チーム ==== |
|||
ユーザ運用エリア(UOA)での「実験運用管制チーム」(Payload Flight Control Team:PL FCT)は、きぼう船内の実験装置を担当する与圧実験運用管制チームと、船外実験プラットフォームの実験装置を担当する曝露実験運用管制チームの2つに分かれており、各役割と配置は以下のようになっている<ref name="kibo jikken team"/>。 |
|||
* 与圧実験運用管制チーム - J-FLIGHTが統括し、各実験ラックごとの責任者であるラックオフィサー(Rack Officer:RO)と、各実験ラックへのコマンド送信や監視などの運用を行うオペレータ(operator:OP)で構成されており、2017年1月現在、実験運用管制員約40名が在籍している<ref name="kibo jikken team"/>。 |
|||
** BIO(BIology Ops Lead、バイオ) - 細胞実験ラック担当。細胞培養装置(Cell Biology Experiment Facility:CBEF)とクリーンベンチ(Clean Bench:CB)の、2つの機器が搭載されている。 |
|||
** FISICS(FluId ScIence and Crystalization Science Ops Lead、フィジィクス・フィジックス) - 流体実験ラック担当。流体物理実験装置(Fluid Physics Experiment Facility:FPEF)と、溶液結晶化観察装置(Solution Crystallization Observation Facility:SCOF)と、蛋白質結晶生成装置(Protein Crystallization Research Facility:PCRF)と、画像取得処理装置(Image Processing Unit:IPU)の、4つの機器が搭載されている。 |
|||
** MEISTER(MSPR Engineering and Integration Staff for Enterprising Research、マイスター) - 多目的実験ラック、多目的実験ラック2担当。水棲生物実験装置(Aquatic Habitat:AQH)、液滴群燃焼実験供試体(Group Combustion Experiment Module:GCEM)、静電浮遊炉(Electrostatic Levitation Furnace:ELF)、沸騰・二相流実験供試体(Two-Phase Flow:TPF) などの機器が搭載されている。 |
|||
** GOLEM(GHF Ops Lead and Engineer of Material Science、ゴーレム) - 勾配炉実験ラック担当。温度勾配炉(Gradient Heating Furnace:GHF)が搭載されている。 |
|||
** GNOME(General Non-rack Operation for Medical and Education、ノーム) - ラックに搭載されていない実験装置、教育文化ミッション(Education Payload Observation:EPO)、医学ミッションなどを担当。これらの実験やミッションを行う宇宙飛行士の作業の支援を行う。 |
|||
* 曝露実験運用管制チーム - J-FLIGHTが統括し、全体の指揮を執る曝露ペイロードオフィサー(ExPO)の元、各曝露実験のコマンド送信や監視などの運用を行うオペレーター(operator:OP)で構成されており、2017年1月現在、実験運用管制員約15名が在籍している<ref name="kibo jikken team"/>。 |
|||
** SEDA-AP OP - 宇宙環境計測ミッション装置(Space Environment Data Acquisition equipment - Attached Payload:SEDA-AP)を担当。 |
|||
** MAXI OP - 全天X線監視装置(Monitor of All-sky X-ray Image:MAXI)を担当。 |
|||
** CALET OP - 高エネルギー電子・ガンマ線観測装置(CALorimetric Electron Telescope:CALET)を担当。 |
|||
** i-SEEP OP - 中型曝露実験アダプター(IVA-replaceable Small Exposed Experiment Platform:i-SEEP)を担当。 |
|||
** SMILES OP - 超伝導サブミリ波リム放射サウンダ(Superconducting Submillimeter-Wave Limb-Emission Sounder:SMILES)を担当。運用を終了している。 |
|||
** MCE OP - ポート共有実験装置(Multi-mission Consolidated Equipment:MCE)を担当。運用を終了している。 |
|||
かつて存在したポジション |
|||
* JPOC(JAXA Payload Operations Conductor、ジェイポック) - 運用管制室のJEM PAYLOADSを補佐し、日本の実験運用全てを取りまとめる、実験運用管制室の指揮官<ref name="hoshide taizai"/>。 |
|||
* RYUTAI Rack UI/PI/Eng.(User Integrator/Principal Investigator/Engineer (RYUTAI Rack)、リュータイ ユーザインテ/ピーアイ/エンジニア、流体実験ラック実験研究者チーム、エンジニアチーム) - 実験テーマ提案者かつ代表研究者のPI、各実験機器・サンプルの製作や実験計画の立案に関わるUI、実験装置の開発を担ったEngineerから構成される、流体実験ラックの実験遂行チーム<ref name="hoshide taizai"/>。 |
|||
* SAIBO Rack UI/PI/Eng.(User Integrator/Principal Investigator/Engineer (SAIBO Rack)、サイボウ ユーザインテ/ピーアイ/エンジニア、細胞実験ラック実験研究者チーム、エンジニアチーム) - RYUTAI Rack UI/PI/Eng.と同様、細胞実験ラックの実験遂行チーム<ref name="hoshide taizai"/>。 |
|||
* EPO/Medical(Education Payload Observation Officer、イーピーオー/メディカル) - 教育文化・医学ミッション担当。各ミッションの機器製作、計画の立案を提案者と共に行ってきた教育文化・医学ミッションの各担当者が、EPOやMedicalとして実験運用管制室に詰める<ref name="hoshide taizai"/>。 |
|||
== 「きぼう」に関連する計画 == |
== 「きぼう」に関連する計画 == |
||
=== 宇宙ステーション補給機(HTV、こうのとり)とH-IIBロケット === |
|||
=== HTVとH-IIB === |
|||
[[ファイル:HTV-1 preparation for release.jpg|thumb|right|250px|きぼうとISSから離脱する[[HTV技術実証機]]。(2009年10月)]] |
|||
{{Main|宇宙ステーション補給機|H-IIBロケット}} |
{{Main|宇宙ステーション補給機|H-IIBロケット}} |
||
日本は |
日本は米国のスペースシャトルや[[ロシア]]の[[ソユーズ]]などに頼らず、地球からISSへ物資を輸送する独自の宇宙輸送システムを開発することを決定し、[[1995年]](平成7年)に概念設計に着手し、1997年(平成9年)から開発が始まった<ref name="mext htv jigohyouka 20101018">{{Cite web|和書|url=https://www.mext.go.jp/component/b_menu/shingi/toushin/__icsFiles/afieldfile/2011/01/06/1299994_2.pdf|title=宇宙ステーション補給機技術実証機(HTV1) プロジェクトに係る事後評価について|publisher=[[JAXA]]|author=虎野吉彦|accessdate=2019-01-18}}</ref>。これは[[宇宙ステーション補給機]](H-II Transfer Vehicle:HTV、愛称こうのとり)と呼ばれる機体で、全長約10メートル、直径約4.4メートルの円筒形で、推進モジュール・電気モジュール・キャリアの3区画からなる<ref>{{Cite web|和書|url=https://iss.jaxa.jp/htv/overview/|title=宇宙ステーション補給機(HTV) 「こうのとり」(HTV)とは|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2019-01-18}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/htv/spec/|title=宇宙ステーション補給機(HTV) 「こうのとり」(HTV)の構成|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2019-01-18}}</ref>。2009年9月11日に、HTVを打ち上げる事を主たる目的として開発された[[H-IIBロケット]]<ref>{{Cite web|和書|url=https://www.jaxa.jp/projects/rockets/h2b/index_j.html|title=JAXA|H-IIBロケット|publisher=JAXA|accessdate=2019-01-18}}</ref>によって[[HTV技術実証機]] (HTV-1) が打ち上げられており<ref>{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-1/|title=宇宙ステーション補給機(HTV) HTV1ミッション|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2019-01-18}}</ref>、2号機以降は毎年約1機ずつ計9機のHTVを打ち上げISSへ物資を輸送する予定である<ref name="jaxa htv"/><ref>{{Cite web|和書|url=http://issstream.tksc.jaxa.jp/iss2/press/htv7_presskit_b.pdf|title=宇宙ステーション補給機「こうのとり」7 号機(HTV7)【ミッションプレスキット】|publisher=1-1. JAXA|date=2018-11-02|accessdate=2019-01-18}}</ref>。 |
||
2020年5月21日に打ち上げられ、同年8月20日に大気圏に再突入した9号機をもって「こうのとり」及びH-ⅡBロケットの運用は終了した<ref>{{Cite web|和書|title=JAXA {{!}} 宇宙ステーション補給機「こうのとり」9号機(HTV9)の大気圏への再突入完了について|url=https://www.jaxa.jp/press/2020/08/20200820-2_j.html|website=JAXA {{!}} 宇宙航空研究開発機構|accessdate=2020-11-19|language=ja}}</ref>。以降は2021年度より[[H3ロケット|H-3ロケット]]によって打ち上げられる予定の[[新型宇宙ステーション補給機]](HTV-X)に引き継がれる。 |
|||
=== CubeSat放出ミッション === |
|||
[[File:CubeSats launched by ISS Expedition 33.jpg|thumb|220px|2012年10月4日にきぼうから放出された[[にわか衛星]]、[[F-1 (人工衛星)|F-1]]、[[TechEdSat]]]] |
|||
きぼうは、国際宇宙ステーション (ISS) 内に持ち込まれた[[CubeSat]]を自身のロボットアームを使って軌道上に放出することができる。これによりロケットで直接軌道に投入するより小さい衝撃で、より多くのCubeSatを効率的に軌道上に投入できる<ref name="yomiuri110616">読売新聞朝刊 2011年6月16日</ref>。 |
|||
=== 小型衛星放出事業 === |
|||
運用の手順としては、まずはCubeSatを衛星搭載ケースに格納して、それを緩衝材に包んで[[無人宇宙補給機]]の船内貨物輸送バックに梱包する。そして無人宇宙補給機の与圧部に船内貨物として積み込みロケットで打ち上げる。無人宇宙補給機が国際宇宙ステーションとドッキングした後、ISSクルーがきぼう内で船内貨物輸送バックを開梱し、衛星搭載ケースをきぼうのエアロックスライドテーブル(放出機構)に設置して、エアロック経由で船外に搬出する。最終的には、船外に搬出された衛星搭載ケースをきぼうのロボットアームで把持してISSの進行方向と逆の方向に向けて、衛星搭載ケースに仕込まれたばねの力で衛星を軌道上に放出する<ref name="JAXA110615">[http://www.jaxa.jp/press/2011/06/20110615_sac_smallsat_j.html 「きぼう」からの小型衛星放出実証ミッションに係る搭載小型衛星の選定結果について](2011年6月15日 JAXA公式サイト)</ref>。 |
|||
[[ファイル:CubeSats launched by ISS Expedition 33.jpg|thumb|250px|2012年10月5日にきぼうから放出された[[にわか衛星]]、[[F-1 (人工衛星)|F-1]]、[[TechEdSat]]<ref name="houshutsu rireki"/>。]] |
|||
きぼうは、国際宇宙ステーション (ISS) 内に持ち込まれた超小型衛星を自身のロボットアームを用いた小型衛星放出機構(J-SSOD)により軌道上に放出することができる。これによりロケットで直接軌道に投入するより小さい衝撃で、より多くの超小型衛星を効率的に軌道上に投入できる<ref name="kogata houshutsu"/><ref>読売新聞朝刊 2011年6月16日</ref>。 |
|||
通常のロケットでの打ち上げと比べ、放出される衛星はISSへの物資輸送機の船内貨物として打ち上げられるため、ソフトバッグと呼ばれる緩衝材<ref name="kogata houshutsu">{{Cite web|和書|url=https://fanfun.jaxa.jp/feature/detail/2960.html|title=宇宙と人をつなぐ架け橋となるために 小型衛星放出ミッション 主任開発員 和田勝|publisher=JAXA|date=2014-08|accessdate=2018-11-20}}</ref>で包んで輸送用バッグ(CTB)に入れられた後に輸送機でISSへ運ばれる。これにより緩衝材・輸送用バッグ・輸送機与圧室・フェアリングの4重保護となり、打ち上げ時の環境条件が自動車の荷台と同じ水準にまで緩和されるため、衛星開発の負担軽減に繋がっている<ref name="mynavi singata jssod"/>。 |
|||
世界初の試みと成るミッションには、[[和歌山大学]]の[[RAIKO]] (雷鼓)、[[福岡工業大学]]の[[にわか衛星]] (FITSAT1)、[[明星電気]][[株式会社]]の[[WE WISH]]、他海外衛星2機が選ばれ、[[こうのとり3号機]]の与圧部に搭載されて[[2012年]][[7月21日]]にH-IIBロケットにより打ち上げられた<ref>[http://www.jaxa.jp/press/2012/07/20120719_kounotori3_j.html 宇宙ステーション補給機「こうのとり」3号機(HTV3)の打上げについて]、JAXA、2012年7月19日</ref>。そして2012年[[10月4日]]から翌5日にかけて、[[星出彰彦]]宇宙飛行士が操作するきぼうのロボットアームにより宇宙空間に放出された。 |
|||
きぼうを利用した衛星放出の検討が始まったのは2010年頃で、アメリカの大学が開発していたcubesat放出装置の設計をもとにJ-SSODは開発されている<ref name="kogata houshutsu"/>。初めて放出されたのは、2012年10月4日に[[明星電気]]の[[WE WISH]]と[[和歌山大学]]・[[東北大学]]の[[RAIKO]] (雷鼓)、同10月5日に福岡工業大学の[[FITSAT-1]](にわか衛星)・他海外衛星の[[F-1 (人工衛星)|F-1]]・[[TechEdSat]]の計5機で、[[星出彰彦]]宇宙飛行士が操作するきぼうのロボットアームにより世界で初めて宇宙空間に衛星を放出した<ref name="houshutsu rireki">{{Cite web|和書|url=http://iss.jaxa.jp/kiboexp/equipment/ef/jssod/history/index.html|title=放出履歴:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-10-09|accessdate=2018-11-19}}</ref>。 |
|||
当初はCubesatのみの放出で、最大6U分の放出能力しかなかったが<ref name="kibo NRCSD">{{Cite web|和書|url=http://iss.jaxa.jp/glossary/jp/ko/jssod.html|title=小型衛星放出機構:ISS関連用語集|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2018-11-20}}</ref>、2016年4月27日に初めて50kg級衛星用の搭載ケースを用いて50kg級超小型衛星が放出されている<ref name="houshutsu rireki"/>。2016年12月9日には、今までの3Uサイズの衛星搭載ケースを左右に2本あった6U対応のものを2段重ねにした、計12U対応の新型放出機構を[[こうのとり6号機|HTV6号機]]でISSに輸送され、2017年1月16日の衛星放出時に初めて使われている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/20170116-cubesat6.html|title=「こうのとり」6号機(HTV6)が「きぼう」に運んだ超小型衛星6機の放出に成功:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-01-16|accessdate=2018-11-20}}</ref>。少しずつ衛星放出能力が増強されているが、「きぼう」のエアロックの大きさを限界まで活用すれば、最大で約300kgの衛星を放出できると見積もられている<ref name="jaxas 2016sp">{{Cite web|和書|url=https://fanfun.jaxa.jp/c/media/file/media_jaxas_jaxas2016sp.pdf|title=JAXA's 特別増刊号|publisher=特集「きぼう」のさらなる利用拡大へ. JAXA|date=2016-03-01|accessdate=2018-12-11}}</ref>。2018年10月9日現在、これまでに34機が放出されている<ref name="houshutsu rireki"/>。 |
|||
2018年2月23日に、きぼう利用戦略<ref>{{Cite web|和書|url=http://iss.jaxa.jp/kiboexp/strategy/|title=きぼう利用戦略:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-08|accessdate=2018-11-20}}</ref>に基づくきぼう利用事業の民営化の第1弾として、2024年末までの契約で2023年度までに自立的運営を目指し技術移転を行う条件で超小型衛星放出サービス事業者の募集を開始し<ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2018/02/20180223_microsat_j.html|title=国際宇宙ステーション(ISS)「きぼう」日本実験棟からの超小型衛星放出事業の事業者の企画提案募集(「きぼう」利用初の民間開放)について|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-02-23|accessdate=2018-11-20}}</ref><ref name="mynavi houshutsu jigyou">{{Cite web|和書|url=https://news.mynavi.jp/techplus/article/20180604-640227/|title=JAXAが「きぼう」利用の一部を民営化、超小型衛星放出事業を2社へ移管 |publisher=マイナビニュース|date=2018-06-04|accessdate=2018-11-20}}</ref>、2018年5月29日に応募があった5社の中から[[Space BD]]と[[三井物産]]が選ばれている<ref name="mynavi houshutsu jigyou"/><ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2018/05/20180529_microsat_j.html|title=国際宇宙ステーション(ISS)「きぼう」日本実験棟からの超小型衛星放出事業 民間事業者の選定結果(「きぼう」利用初の民間開放)について|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-05-29|accessdate=2018-11-20}}</ref>。 |
|||
今後の計画では、2018年に6Uサイズの衛星を放出可能にし、2019年に24U相当、2020年には48U相当に能力を向上させた衛星放出機構を開発し運用する予定で、2020年以降は年間100Uの衛星放出を構想している<ref name="jssod 48u">{{Cite web|和書|url=https://sorae.info/02/2018_05_16_kibou.html|title=「きぼう」から3カ国の超小型衛星放出 今後は48Uキューブサットへ対応を拡大|publisher=[[sorae]]|date=2018-05-16|accessdate=2018-11-20}}</ref><ref name="eisei houshutsu mineika">{{Cite web|和書|url=https://fanfun.jaxa.jp/jaxatv/files/20180227_jssodrfp.pdf|title=超小型衛星放出事業の事業者募集概要 ~事業の一部民営化~|publisher=JAXA|date=2018-02-27|accessdate=2018-11-20}}</ref><ref>{{Cite web|和書|url=http://issstream.tksc.jaxa.jp/iss2/documents/kibou-riyou_web-2_second.pdf|title=きぼう利用戦略 「きぼう」利用成果最大化に向けて アジェンダ2020 〔第2版〕|publisher=22ページ目. JAXA|date=2017-08|accessdate=2018-11-20}}</ref>。この年間100Uの内、民間の割合が7割に、JAXAが3割になる予定である<ref name="eisei houshutsu mineika"/><ref name="mynavi houshutsu jigyou"/>。なお、この小型衛星放出機構(J-SSOD)を利用した衛星放出事業のJAXAでの税込み標準価格は、1Uが300万円、2Uが500万円、3Uが800万円、50kg級が1億400万円となっているが、民間事業者での価格は未定となっている<ref name="mynavi houshutsu jigyou"/><ref>{{Cite web|和書|url=https://aerospacebiz.jaxa.jp/wp-content/uploads/2016/07/kibo_yusyo_guide.pdf|title=「きぼう」からの超小型衛星の放出機会提供 募集案内 <有償の仕組み(試行版)>|publisher=6ページ目. JAXA|date=2014-04|accessdate=2018-11-20}}</ref>。 |
|||
=== HTV搭載小型回収カプセル(HSRC) === |
|||
HTV搭載小型回収カプセル(HTV Small Re-entry Capsule:HSRC)は、2018年9月に打ち上げられた[[こうのとり7号機|HTV7号機]]に搭載された小型回収カプセルで<ref>{{Cite web|和書|url=https://iss.jaxa.jp/htv/mission/htv-7/|title=宇宙ステーション補給機(HTV) 「こうのとり」7号機(HTV7)ミッション|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018|accessdate=2018-12-11}}</ref>、2018年11月11日に大気圏に再突入し[[南鳥島]]沖で回収に成功している<ref>{{Cite web|和書|url=https://www.jaxa.jp/topics/2018/index_j.html|title=JAXA|トピックス(2018年)|publisher=JAXA|date=2018-11-12|accessdate=2018-12-11}}</ref>。 |
|||
この小型回収カプセルで、「きぼう」で行われた「低温高品質タンパク質結晶生成(Low Temperature Protein Crystal Growth:LTPCG)実験」で作られたタンパク質試料<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/plan/181010.html|title=「きぼう」の利用状況と今後の予定:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-10-10|accessdate=2018-12-11}}</ref>と静電浮遊炉(ELF)の材料サンプル<ref>{{Cite web|和書|url=https://twitter.com/JAXA_Kiboriyo/status/1062279886285336576|title=JAXAきぼう利用ネットワーク(@JAXA_Kiboriyo)さん | Twitter|publisher=JAXA Twitter|date=2018-11-13|accessdate=2018-12-11}}</ref>を回収している。国際宇宙ステーションからの実験試料の回収は日本としては初めてで<ref>{{Cite web|和書|url=https://iss.jaxa.jp/htv/htv7_wakata-comment.html|title=「こうのとり」7号機(HTV7)大気圏再突入完了と小型回収カプセルの回収にあたって|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-11-11|accessdate=2018-12-11}}</ref>、アメリカ、ロシアに次いで3か国目となった<ref>{{Cite web|和書|url=http://www.tokyo-np.co.jp/article/ibaraki/list/201811/CK2018111402000165.html|title=宇宙から帰還、カプセル内の実験試料 JAXAに歓喜の到着|publisher=[[東京新聞]]|date=2018-11-14|accessdate=2018-12-11}}</ref>。 |
|||
今後はHTVなどの母船に依存せず、単独での運用ができる軌道離脱モジュールを付与した形態のカプセルを検討中で、[[宇宙ステーション補給機#新たな宇宙機(HTV-X)|HTV-X]]での技術実証を目指している。HTV-Xの非与圧部で回収カプセルを運び、国際宇宙ステーションの船外に一時的に設置し、「きぼう」のエアロックとロボットアームを使って実験試料などの回収物資を格納できると見られている<ref>{{Cite web|和書|url=https://news.mynavi.jp/techplus/article/20181129-732059/|title=JAXA、宇宙ステーションからの直行便「HSRC」をプレスに公開 |publisher=マイナビニュース|date=2018-11-29|accessdate=2018-12-11}}</ref>。 |
|||
=== セントリフュージ === |
=== セントリフュージ === |
||
{{Main|セントリフュージ}} |
{{Main|セントリフュージ}} |
||
セントリフュージ(生命科学実験施設、Centrifuge)は、日本が「きぼう」打ち上げの見返りとして、[[アメリカ航空宇宙局]]の実験棟「セントリフュージ」における重力発生装置、生命科学グローブボックス、重力発生装置搭載モジュールの開発・製造を行い、アメリカに引き渡す予定であった施設で、1997年8月に日本とNASAはこの条件で合意しており、開発費として約430億円を見込んでいた<ref name="iss centrifuge keikaku">{{Cite web|和書|url=https://ssl.jspacesystems.or.jp/library/archives/jaros/space%20utilization%20view/h17_chapter6.pdf|title=平成17年度宇宙環境利用の展望 第6章 国際宇宙ステーション(ISS)・セントリフュージ計画|publisher=100ページ目,107ページ目. 一般財団法人[[宇宙システム開発利用推進機構]]|date=2006|accessdate=2018-12-07}}</ref>{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-50.}}。人工的に0.01Gから0.01G刻みで2Gまでの重力を発生させ、生物飼育箱(Habitat:ハビタット)を最大4つ搭載し、質量1.2トンのローターが1分間に最大42回転を連続90日間行える、直径が2.5m、奥行き1.5m、質量約2トンの「重力発生装置(Centrifuge Rotor:CR)」、450リットルの隔離した作業空間で生物試料を扱う高さ2m、横1m、奥行き2m、質量約1トンの「生命科学グローブボックス(Life Sciences Globvebox:LSG)」、生物飼育箱搭載ラック(Habitat Holding Racks:HHRs)、保管ラック(Stowage Racks)、顕微鏡、冷凍冷蔵庫と、これらを搭載する外径4.4m、長さ9m、質量約10トンで15個のラックを搭載できる「重力発生装置搭載モジュール(Centrifuge Accommodations Module:CAM)」で構成されている<ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/contribution/issjpdoc3_2.html|title=生命科学実験施設 セントリフュージ|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2005-12-20|accessdate=2018-12-07}}</ref><ref>{{Cite web|和書|url=http://iss.jaxa.jp/glossary/jp/se/centrifuge.html|title=生命科学実験施設(セントリフュージ):ISS関連用語集|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|accessdate=2018-12-07}}</ref><ref>{{Cite web|和書|url=https://ssl.jspacesystems.or.jp/library/archives/jaros/space%20utilization%20view/h17_chapter6.pdf|title=平成17年度宇宙環境利用の展望 第6章 国際宇宙ステーション(ISS)・セントリフュージ計画|publisher=一般財団法人宇宙システム開発利用推進機構|date=2006|accessdate=2018-12-07}}</ref>。 |
|||
日本は「きぼう」打ち上げの見返りとして、[[アメリカ航空宇宙局]]の実験棟「セントリフュージ」における重力発生装置などの開発・製造を行い、アメリカに引き渡す予定であった。だが[[2005年]](平成17年)[[8月31日]]に発表されたNASAの変更計画で「セントリフュージ」計画は中止され、日本における開発も終了した。NASAとはその後の調整によって、開発品の一部を納入することにより、契約を完了すること、及び「きぼう」の打ち上げについて合意している。装置本来の目的であった生命科学の発展に貢献することはできなかったが、「きぼう」打ち上げの対価と言う意味においては、成功を収めたと言えるであろう。 |
|||
だが2005年(平成17年)8月31日に発表されたNASAの変更計画で「セントリフュージ」計画は中止され、2005年10月に正式に中止の通知を受け日本における開発も終了した<ref>{{Cite web|和書|url=https://ssl.jspacesystems.or.jp/library/archives/jaros/space%20utilization%20view/h17_chapter6.pdf|title=平成17年度宇宙環境利用の展望 第6章 国際宇宙ステーション(ISS)・セントリフュージ計画|publisher=108ページ目. 一般財団法人宇宙システム開発利用推進機構|date=2006|accessdate=2018-12-07}}</ref>{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第2章 宇宙ステーション計画参加活動の全体経緯 2-64,2-65}}。「きぼう」の打ち上げに関しては、2006年3月2日に行われた「国際宇宙ステーション計画に関する宇宙機関長会議」において、日本側は「きぼう」の輸送の確保を求め、2009年までに3便全ての打ち上げに合意している<ref name="kibo iss hoa kekka 20060308"/>。 |
|||
=== 日本単独宇宙ステーション (JSS) === |
=== 日本単独宇宙ステーション (JSS) === |
||
JAXAで構想している小型宇宙ステーション。ISS運用予定が短かった頃に構想されたもので、運用終了時に廃棄されるモジュールから設計上10年程度寿命の残っているきぼうを回収し、発展型HTVによって独自の居住モジュールやドッキングモジュール、太陽電池アレイ、推進モジュール(場合によっては打ち上げに使ったHTVの与圧キャリアや推進モジュールを流用する)を打ち上げ、組み合わせる予定であった |
JAXAで構想している小型宇宙ステーション。ISS運用予定が短かった頃に構想されたもので、運用終了時に廃棄されるモジュールから設計上10年程度寿命の残っているきぼうを回収し、発展型HTVによって独自の居住モジュールやドッキングモジュール、太陽電池アレイ、推進モジュール(場合によっては打ち上げに使ったHTVの与圧キャリアや推進モジュールを流用する)を打ち上げ、組み合わせる予定であった。 |
||
== |
== 成果 == |
||
=== ISS計画への参加の意義・目標と成果 === |
|||
きぼうの運用と利用を主たる目的とした日本における国際宇宙ステーション計画の2010年までの総費用は約7,100億円で、その内訳は、きぼう開発費に約2,500億円、きぼう実験装置開発費に約450億円、HTV開発費(技術実証機の建造費含む)に約680億円、地上施設開発費と宇宙飛行士訓練費とシャトルによるきぼう打ち上げ費に約2,360億円、運用費(管制・保全など)と利用費(実験関連費)に約1,100億円である。なお、ここにはH-IIBの開発費と試験1号機の打ち上げ費は含まない<ref name="kibouhiyou">[http://www.mext.go.jp/component/b_menu/shingi/toushin/__icsFiles/afieldfile/2010/07/08/1295296_4.pdf 付録1 国際宇宙ステーション(ISS)計画概要(その3)] 宇宙開発委員会 国際宇宙ステーション特別部会 -中間とりまとめ- 平成22年6月</ref>。 |
|||
1985年4月に発表された宇宙開発委員会宇宙基地計画特別部会報告「宇宙基地計画参加に関する基本構想」の中で、「きぼう」の開発を含む日本のISS計画への参加の意義・目標として「高度技術の習得」「次世代の科学や技術の促進と宇宙活動範囲の拡大」「国際協力への貢献」「宇宙環境利用の実用化の促進」の4つが示されている<ref name="kibo handbook 1.3"/>。 |
|||
2014年5月にJAXAは、2013年までにISS計画への参加によって得られた成果について、「有人・無人宇宙技術の習得」「産業の振興」「宇宙実験からの成果の蓄積」「国際協力による外交上のプレゼンス向上への貢献」「青少年の育成」の5つを上げている<ref>{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/05/20/1347214_2.pdf|title=ISS計画への参加から得られた成果について|publisher=2-3ページ目. 文部科学省|date=2014-05-16|accessdate=2019-01-30}}</ref>。「有人・無人宇宙技術の習得」については、有人打ち上げを除く自律的に有人宇宙活動を行うための技術を獲得し、その技術を獲得するのにかかった期間と費用は2013年までに28年と約8,260億円で、世界水準の有人宇宙技術を最も効率的に短期間で得たとしている<ref name="monbu ISS seika 20140520">{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/05/20/1347214_2.pdf|title=ISS計画への参加から得られた成果について|publisher=4-12ページ目. 文部科学省|date=2014-05-16|accessdate=2019-01-30}}</ref>。「産業の振興」については、「きぼう」の開発・運用に約650社、「こうのとり(HTV)」の開発・運用に約400社の日本企業が関わっており、各企業の有人宇宙技術の習得や宇宙関連製品の海外受注に繋がるなど、宇宙産業基盤の維持向上成熟に貢献したとしている<ref name="iss seika monbu 20140520 13-18">{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/05/20/1347214_2.pdf|title=ISS計画への参加から得られた成果について|publisher=13-18ページ目. 文部科学省|date=2014-05-16|accessdate=2019-01-30}}</ref>。「宇宙実験からの成果の蓄積」については、宇宙環境を利用して[[細胞培養]]、植物培養、水棲生物飼育、金属・[[半導体]]結晶成長、[[蛋白質]]結晶成長、流体物理計測、X線天文観測、大気観測、地球観測などの各種実験・観測を行い、その学術的成果として[[査読]]付き論文が約900件となっている(詳細は[[きぼう#きぼうの成果|きぼうの成果]]を参照)<ref>{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/05/20/1347214_2.pdf|title=ISS計画への参加から得られた成果について|publisher=19-32ページ目. 文部科学省|date=2014-05-16|accessdate=2019-01-30}}</ref>。「国際協力による外交上のプレゼンス向上への貢献」については、アジア諸国(マレーシア・ベトナム等)による「きぼう」の利用を進め、国際会議の誘致や議長国を務めるなど宇宙常任理事国としての地位を確立したとしている<ref>{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/05/20/1347214_2.pdf|title=ISS計画への参加から得られた成果について|publisher=33-34ページ目. 文部科学省|date=2014-05-16|accessdate=2019-01-30}}</ref>。「青少年の育成」については、JAXA保有の有人宇宙関連の写真・映像の平成25年度申請件数は4,171件(全申請件数の約4割、その内宇宙飛行士関連が1,862件)で、教科書・図鑑・テレビ番組・プラネタリウム等で利用されており、日本人宇宙飛行士による日本の小中学生との交信イベントや講演活動などを通じて、科学技術人材の育成に貢献しているとしている。また、平成25年度のJAXA関連報道はテレビが約1,000件、新聞が約2,700件で、その内約5割は有人宇宙関連報道で更にその約8割は宇宙飛行士関連報道となっており、これらの報道により日本の有人宇宙開発が青少年を含む国民の耳目に触れる機会となり、科学技術に対する興味や関心を高める一助になっている<ref>{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/05/20/1347214_2.pdf|title=ISS計画への参加から得られた成果について|publisher=35-36ページ目. 文部科学省|date=2014-05-16|accessdate=2019-01-30}}</ref>。 |
|||
2011年以後の1年毎の日本の国際宇宙ステーション計画費用は約400億円で、その内訳は、運用費(管制・保全・宇宙飛行士訓練など)に約90億円、利用費(実験関連費)に約40億円、物資輸送費(H-IIBによるHTV打ち上げ)に約250億円である<ref name="kibouhiyou"/>。日本の宇宙開発費のうちJAXA独自の予算は毎年約1,800億円であることを考えると、毎年約400億円の支出となる国際宇宙ステーション計画費用は日本の宇宙開発予算の中で相当のウェイトを占めていると言える。 |
|||
=== きぼうの成果 === |
|||
(各国ごとの支出は[[国際宇宙ステーション#費用|国際宇宙ステーション]]を参照。) |
|||
きぼうの本格的な運用が始まった2008年8月以降<ref name="kibo weekly news no.308"/>、[[生命科学]]、[[宇宙医学]]、[[技術開発]]、応用利用、[[物質科学]]、[[物理科学]]、[[宇宙物理学]]、[[人文科学]]、[[社会科学]]などの各分野の他、船外を利用した[[民生用|民生品]]の宇宙実証、[[地球]]観測、[[小型衛星]]放出など様々な成果が出ている<ref name="kibo seika">{{Cite web|和書|url=http://iss.jaxa.jp/kiboresults/utilization/|title=「きぼう」利用の成果:これまでに得られた成果|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2015-05-14|accessdate=2018-12-13}}</ref>。ISSで行われた日本の実験は1998年12月-2013年9月までに453件<ref name="iss seika monbu 20140520 45-48">{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/05/20/1347214_2.pdf|title=ISS計画への参加から得られた成果について|publisher=45-48ページ目. 文部科学省|date=2014-05-16|accessdate=2018-12-18}}</ref>、きぼうを利用したミッションは設置後約5年間で約80件に上り<ref>{{Cite web|和書|url=https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/05/20/1347214_2.pdf|title=ISS計画への参加から得られた成果について|publisher=19ページ目. 文部科学省|date=2014-05-16|accessdate=2018-12-18}}</ref>、これらの実験により2013年8月までに「きぼう」に関連した査読付き論文は925件が発表されており、学位論文(博士論文、修士論文、学部卒業論文)は85件、それ以外の総説、査読なし論文、プロシーディングス等が697件となっている<ref name="iss seika monbu 20140520 45-48"/>。また、「きぼう」利用研究者が国の競争的資金制度などの競争的資金を獲得した件数は2013年8月までに140件を超えている<ref name="iss seika monbu 20140520 45-48"/>。 |
|||
これらの一連の成果については宇宙航空研究開発機構(JAXA)ホームページ内の「宇宙ステーション・きぼう広報・情報センター」にて発信されており<ref>{{Cite web|和書|url=http://iss.jaxa.jp/kiboresults/|title=これまでに得られた成果|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-09-28|accessdate=2018-12-13}}</ref>、2014年までに得られた成果をまとめた「「きぼう」利用成果レポート2014 -宇宙で得られた成果-」と題する報告書も出されている<ref name="kibo seika"/>。 |
|||
== その他 == |
|||
=== 名称 === |
|||
「きぼう」という愛称は1999年に宇宙開発事業団(当時)が公募したものであり、この愛称を応募した総数は132人であった。宇宙開発事業団から組織改編された宇宙航空研究開発機構が、応募者名簿を2005年4月施行の[[個人情報保護法]]の下、誤った認識により破棄し、「きぼう」の命名者も一時不明になっていたが、後に再発見された。 |
|||
また、国際宇宙ステーション(ISS)の参加国の内、日本(JAXA)、アメリカ(NASA)、カナダ(CSA)、欧州(ESA)、ロシア(Roscosmos)の5か国の宇宙機関は合同で、「きぼう」での成果も含むISSでの成果72事例を「国際宇宙ステーション 人類への恩恵(INTERNATIONAL SPACE STATION BENEFITS FOR HUMANITY)」と題する報告書にまとめている<ref name="jaxas 2016sp"/><ref>{{Cite web|和書|url=http://iss.jaxa.jp/kiboresults/benefits/|title=国際宇宙ステーション 人類への恩恵|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-06-07|accessdate=2018-12-13}}</ref>。 |
|||
=== 情報漏洩事件 === |
|||
{{See|宇宙航空研究開発機構#情報漏洩事件}} |
|||
こういった状況の中で、日本が毎年負担している「きぼう」を含むISS関連経費約350億円-400億円の費用対効果に対する批判も出ている<ref name="yomiuri hikoushi zadankai">{{Cite web|和書|url=http://www.yomiuri.co.jp/matome/archive/20170509-OYT8T50026.html|title=日本の宇宙開発の力を見せたい…日の丸飛行士座談会(中)|publisher=読売新聞|url-status=dead|url-status-date=2017-05-10|archiveurl=https://web.archive.org/web/20170903115823/http://www.yomiuri.co.jp/matome/archive/20170509-OYT8T50026.html|archivedate=2017-09-03|accessdate=2019-03-05}}</ref>。これに対し、[[宇宙飛行士]]の[[油井亀美也]]は「成果は非常に上がっていると思っている」とした上で、「きぼう」での成果を国民に伝える広報の在り方を課題に挙げている<ref name="yomiuri hikoushi zadankai"/>。またISS関連経費の使途についても、直接NASAなどの海外の宇宙機関にお金を支払っているわけではなく、ISSの共通的なシステム運用経費分担(CSOC、MOU第9条3項)の分担方法(IGA第15条5項、MOU第9条5項)として<ref name="kibohiyou"/>、HTVでの物資輸送による現物提供を以て支払い、その対価として日本人宇宙飛行士をISSへ運んでもらう権利を得ており、このHTVの開発・製造・運用などで得られた宇宙開発技術の蓄積も成果の1つであるとしている<ref name="yomiuri hikoushi zadankai"/>。[[向井千秋]]宇宙飛行士も以前に同様の考えを示しており、きぼう・HTVの開発を通じて得た有人宇宙技術・人材の蓄積も成果であるとしている<ref>{{Cite web|和書|url=https://www.mitsubishielectric.co.jp/me/dspace/column/c1407_1.html|title=三菱電機 DSPACE コラム:読む宇宙旅行 宇宙ステーション400億円の成果って?向井千秋さん熱弁:林公代|publisher=三菱電機|date=2014-07-10|accessdate=2019-01-22}}</ref>。 |
|||
=== 運用上のトラブル === |
|||
*船内実験室設置直後、センサーが結露するというトラブルが発生した。これは、船内実験室が通常2名、時間制限つきで4名在室できるよう設計されているのに、ISSにいた6名の宇宙飛行士全員が船内実験室に集まってしまったためと判明した{{要出典|date=2009年8月}}。前述のとおり、船内実験室はISS最大の与圧モジュールであり、ラック搬入前の船内実験室の広さに宇宙飛行士たちが「はしゃぎすぎた」のであった。 |
|||
2020年8月12日(水) 午後7時45分に「きぼう」に設置されたスタジオと地球をつなぐ双方向ライブ配信実験「KIBO 宇宙放送局」を実施。 |
|||
*2010年4月21日18時頃、[[超伝導サブミリ波リム放射サウンダ]] (SMILES) の受信系の機器の一部が待機モードとなったため観測を中断した。その後原因究明調査したところ、サブミリ波局部発振器 (SLO) 内部の[[ガンダイオード|ガン発振器]]の異常だという事がわかった。今後もなぜ異常が発生したのが原因を究明していく事となる<ref>{{Cite web|url=http://www.jaxa.jp/press/2010/05/20100526_sac_smiles.pdf|title=超伝導サブミリ波リム放射サウンダ(SMILES)のサブミリ波受信系異常の現状について|accessdate=2010-05-28}}</ref>。 |
|||
== 受賞歴 == |
|||
*2010年5月13日、『きぼう』有償利用事業<ref>[http://www.jaxa.jp/press/2009/06/20090610_kibo_j.html 第2回「きぼう」有償利用テーマの選定結果及び追加募集について] JAXA 2009年6月10日</ref>において2009年8月より約8ヵ月間軌道上で保管され、4月に回収された植物種子の一部が所在不明となっていることが発覚<ref>[https://news.mynavi.jp/news/2010/05/14/020/?rt=na 宇宙ステーションから持ち帰った植物種子が紛失 - JAXAが発表]{{リンク切れ|date=2018年3月 |bot=InternetArchiveBot }} マイコミジャーナル 2010年5月14日</ref>。その後、所在不明とされていた植物種子は軌道上に運ばれずNASAジョンソン宇宙センターに残されていたことが確認された<ref>[http://www.47news.jp/CN/201006/CN2010061701000362.html カボチャの種、NASAで発見 宇宙に運ばれず] 47NEWS 2010年6月17日</ref><ref>[http://www.chibanippo.co.jp/news/chiba/local_kiji.php?i=nesp1276838560 行方不明のカボチャの種、NASAに残る] 千葉日報 2010年06月18日</ref>。 |
|||
* 2008年4月30日 - きぼう船内保管室の組み立てを行った[[STS-123]]での1J/Aミッションへの貢献により、NASAが主催しNASAのフライトディレクターによって選ばれる(以下同)「Lyndon B. Johnson Space Center Group Achievement Award」をきぼう運用管制チームが、「Lyndon B. Johnson Space Center Certificate of Appreciation」を松浦真弓フライトディレクターがそれぞれ受賞している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1ja/news/nasa_award.html|title=「きぼう」運用管制チームがNASAから表彰されました|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-05-16|accessdate=2018-12-03}}</ref>。 |
|||
* 2008年7月10日 - きぼう船内実験室の組み立てを行った[[STS-124]]での1Jミッションへの貢献により、NASAが主催する「Lyndon B. Johnson Space Center Group Achievement Award」をきぼう運用管制チームが、「Lyndon B. Johnson Space Center Certificate of Appreciation」を東覚芳夫フライトディレクターがそれぞれ受賞している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/mission/1j/news/nasa_award_1j.html|title=1Jミッションで活躍した「きぼう」運用管制チームがNASAから表彰されました|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-08-05|accessdate=2018-12-03}}</ref>。 |
|||
* 2010年1月15日 - きぼうの開発により、一般社団法人[[日本航空宇宙学会]]が主催する「2010年度技術賞(プロジェクト部門)」を、JAXAと三菱重工業、IHIエアロスペース、NEC、NEC東芝スペースシステム、川崎重工業、三菱電機が共同受賞している<ref>{{Cite web|和書|url=https://www.jsass.or.jp/wp-content/uploads/2018/11/AcademicAwardsList.pdf|title=日本航空宇宙学会 学会賞受賞者一覧 第1回(平成3年度)~第26回(平成28年度)|publisher=一般社団法人[[日本航空宇宙学会]]|date=2019-02|accessdate=2019-03-05}}</ref>。 |
|||
* 2010年11月10日 - 宇宙空間での実験設備に要求される高い機能性・安全性・操作性を実現したことが評価され、2010年度[[グッドデザイン賞]]において「金賞(経済産業大臣賞)」を受賞した<ref name="jaxas 037"/><ref>{{Cite web|和書|url=https://www.g-mark.org/award/describe/36737?token=svZcuQbTWm|title=宇宙実験施設 (「きぼう」日本実験棟)|publisher=公益財団法人日本デザイン振興会|date=2010-09-29|accessdate=2018-11-13}}</ref>。 |
|||
* 2010年11月26日 - JAXAとNECが「宇宙用遠隔操作ロボット「ロボットアーム」(親アーム)」で応募し、[[経済産業省]]と一般社団法人[[日本機械工業連合会]]などが主催する「第4回ロボット大賞 日本科学未来館館長賞」を受賞している<ref>{{Cite web|和書|url=http://www.robotaward.jp/archive/2010/prize/|title=第4回ロボット大賞 大賞 アーカイブ - 2010受賞ロボット|publisher=ロボット大賞 事務局|date=2010-11|accessdate=2018-11-25}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/archive/2010/11/4th_robotaward.html|title=「きぼう」ロボットアームが「第4回ロボット大賞」にて優秀賞および日本科学未来館館長賞を受賞しました!:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2010-11-25|accessdate=2018-11-25}}</ref>。 |
|||
* 2011年9月8日 - 「「きぼう」ロボットアームと装置交換機構による軌道上組立技術の実用化」により、一般社団法人日本ロボット学会が主催する「第16回(2011年)日本ロボット学会実用化技術賞」を受賞している<ref>{{Cite web|和書|url=https://www.rsj.or.jp/award/technical_innovations/|title=実用化技術賞|賞区分|日本ロボット学会|publisher=一般社団法人日本ロボット学会|date=2011-01-01|accessdate=2018-11-25}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/archive/2011/09/5th_robotaward.html|title=「きぼう」ロボットアームなどによる組立技術、「日本ロボット学会 実用化技術賞」を受賞!:「きぼう」日本実験棟|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2011-09-12|accessdate=2018-11-25}}</ref>。 |
|||
* 2011年9月28日 - 1997年8月7日に打ち上げられた[[スペースシャトル]][[STS-85]]において行われた、きぼうに実装する前の技術実証として精密ロボットアーム実験(マニピュレーター飛行実証試験、MFD:Manipurator Flight Demonstration)を世界で初めて宇宙空間で行った成果により、きぼうはアメリカ航空宇宙学会(AIAA)による「2011AIAA Space Automation andRobotics Award」を[[きく7号]]と共に受賞している<ref>{{Cite web|和書|url=https://fanfun.jaxa.jp/c/media/file/media_jaxas_jaxas041.pdf|title=JAXA's No.041|publisher=JAXA|date=2011-11-01|accessdate=2018-11-13}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/archive/2011/10/space_automation_and_robotics.html|title=「きぼう」、アメリカ航空宇宙学会「Space Automation and Robotics Award 2011」受賞!|publisher=JAXA|date=2011-10-04|accessdate=2018-11-13}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kibo/pdf/aiaa%28mfd%29.pdf|title=Space Automation and Robotics Award|publisher=アメリカ航空宇宙学会(AIAA)|date=2011-09-28|accessdate=2018-11-13}}</ref>。 |
|||
* 2014年3月28日 - きぼうの「REX-J」開発・運用チームが、一般社団法人[[日本機械学会]]が主催する「2013年度宇宙工学部門一般表彰スペースフロンティア」を受賞している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/140428_rex-j.html|title=「REX-J」開発/運用チーム 日本機械学会 宇宙工学部門 一般表彰スペースフロンティアを受賞!|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2014-04-28|accessdate=2018-11-23}}</ref>。 |
|||
* 2014年6月19日 - きぼうの船外実験装置であるポート共有実験装置(MCE)に搭載されている「スプライト及び雷放電の高速測光撮像センサー(JEM-GLIMS)」での研究成果により、第3回ISS Research and Development Conferenceにおいて、アメリカのAmerican Astronautical Society(AAS)が主催する「ISS Research Awards(Space Station Top Results for Discoveries)」を受賞している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/140625_jem_glims.html|title=「スプライト及び雷放電の高速測光撮像センサ(JEM-GLIMS)」の研究成果がNASAから表彰されました|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2014-06-25|accessdate=2018-11-26}}</ref><ref>{{Cite web|url=https://www.nasa.gov/mission_pages/station/research/news/2013_top_discoveries/#.U6VCQRa0Tap|title=Space Station Top Results for Discoveries Announced | NASA|publisher=NASA|date=2014-06-19|accessdate=2018-11-26}}</ref>。 |
|||
* 2016年4月20日 - きぼうの船外実験装置であるポート共有実験装置(MCE)に搭載されている「スプライト及び雷放電の高速測光撮像センサー(JEM-GLIMS)」での研究成果により、一般社団法人[[電気学会]]が主催する「第72回電気学術振興賞 進歩賞」を受賞している<ref>{{Cite web|和書|url=http://www.iee.jp/?p=13922|title=平成28年表彰受賞者が決定しました|一般社団法人 電気学会|publisher=一般社団法人電気学会|date=2016-04-20|accessdate=2018-11-28}}</ref><ref>{{Cite web|和書|url=http://www.ep.sci.hokudai.ac.jp/~jemglims/index.html|title=JEM-GLIMS|publisher=[[北海道大学]]|date=2016-05-27|accessdate=2018-11-28}}</ref>。 |
|||
* 2016年7月14日 - きぼうでの蛋白質結晶化実験と船外実験装置MAXIでの実験の成果により、第5回ISS Research and Development Conferenceにおいて、アメリカのAmerican Astronautical Society(AAS)が主催する「ISS Research Awards(Space Station Top Results for Discoveries)」を受賞している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/topics/2016/07/160715.html|title=「きぼう」で行われた日本の実験成果が、2016年の ISS Research Awards "Space Station Top Results for Discoveries"を受賞しました|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2016-07-15|accessdate=2018-11-26}}</ref>。 |
|||
* 2017年3月31日 - きぼうの小型衛星放出チームが、一般社団法人日本機械学会が主催する「2016年度宇宙工学部門宇宙賞」を受賞している<ref>{{Cite web|和書|url=https://www.jsme.or.jp/sed/news_letter/nl2017/1.pdf|title=Space Engineering 宇宙工学部門ニュースレター No.32(Web版)2016年度部門賞|publisher=一般社団法人[[日本機械学会]]|date=2018-02-23|accessdate=2019-03-06}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/170407_cubesat.html|title=「きぼう」からの小型衛星放出チーム 日本機械学会 宇宙工学部門 宇宙賞を受賞!|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-04-07|accessdate=2018-11-22}}</ref>。 |
|||
* 2017年7月20日 - きぼうからの超小型衛星放出の取り組みが、第6回ISS Research and Development Conferenceにおいて、アメリカのAmerican Astronautical Society(AAS)が主催する「ISS Research Awards(Innovation Award- Commercialization)」を、JAXAのJ-SSODチームとアメリカのナノラック社(NanoRacks)が共同受賞している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/topics/2017/07/170721_iss_wards.html|title=「きぼう」からの超小型衛星放出の利用促進活動が、2017年の ISS Research Awards(Innovation Award- Commercialization分野)を受賞!!|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2017-07-21|accessdate=2018-11-26}}</ref>。 |
|||
* 2017年7月25日 - 第50次/51次ISS長期滞在クルーの帰還記念イベントにおいて、NASAが主催する「Lyndon B. Johnson Space Center Group Achievement Award」を、きぼうのエアロックチームが受賞している<ref>{{Cite web|和書|url=https://ja-jp.facebook.com/jaxaHouston/posts/%E6%97%A5%E6%9C%AC%E3%81%AE%E5%AE%9F%E9%A8%93%E6%A3%9F%E3%81%8D%E3%81%BC%E3%81%86jem%E3%82%A8%E3%82%A2%E3%83%AD%E3%83%83%E3%82%AF%E3%83%81%E3%83%BC%E3%83%A0%E3%81%8Cjsc-group-awards%E3%82%92%E5%8F%97%E8%B3%9E%E3%81%97%E3%81%BE%E3%81%97%E3%81%9Fjem-airlock-team-won-a-jsc-group-ach/1248317358627621/|title=日本の実験棟「きぼう」(JEM)エアロックチームが、JSC Group...|publisher=JAXA Houston Office Facebook|date=2017-07-25|accessdate=2018-11-29}}</ref>。 |
|||
* 2017年11月13日-11月15日 - きぼうの多目的実験ラック(MSPR)に搭載されている液滴群燃焼実験装置(GCEM)の開発により、第55回燃焼シンポジウムにおいて、一般社団法人日本燃焼学会が主催する「平成29年度日本燃焼学会 技術賞」を、JAXAと株式会社IHI検査計測、[[日本大学]]、[[山口大学]]が共同受賞している<ref>{{Cite web|和書|url=http://www.combustionsociety.jp/activity/prize2017.html|title=平成29年度日本燃焼学会表彰|publisher=一般社団法人日本燃焼学会|date=2017-11|accessdate=2018-11-29}}</ref><ref>{{Cite web|和書|url=https://www.iic-hq.co.jp/library/pdf/059_11.pdf|title=報告 日本燃焼学会より技術賞受賞 「国際宇宙ステーションにおける液滴群燃焼実験装置(GCEM)の開発」|publisher=株式会社IHI検査計測|date=2018-04|accessdate=2018-11-29}}</ref>。 |
|||
* 2018年3月30日 - きぼうの簡易曝露実験装置(ExHAM)開発・運用チームが、一般社団法人日本機械学会が主催する「2017年度宇宙工学部門一般表彰スペースフロンティア」を受賞している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/180406_exham.html|title=「きぼう」簡易曝露実験装置(ExHAM)開発/運用チームが日本機械学会の宇宙工学部門スペースフロンティア受賞|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-04-06|accessdate=2018-11-23}}</ref>。 |
|||
* 2018年4月10日 - きぼうでの超小型衛星放出機構を用いた取り組みに対し、[[文部科学省]]主催の平成30年度科学技術分野の文部科学大臣表彰「科学技術賞(科学技術振興部門)」を受賞している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/180419_cubesat.html|title=「きぼう」超小型衛星放出プラットフォームにおける取組みが文部科学大臣表彰「科学技術賞」を受賞|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-04-19|accessdate=2018-11-22}}</ref><ref>{{Cite web|和書|url=https://www.mext.go.jp/b_menu/houdou/30/04/__icsFiles/afieldfile/2018/04/10/1403097_1.pdf|title=平成30年度 科学技術分野の文部科学大臣表彰 科学技術賞 受賞者一覧|publisher=文部科学省|date=2018-04-10|accessdate=2018-11-22}}</ref>。 |
|||
* 2018年7月14日-7月22日 - アメリカで開催されたCOSPAR 2018において、きぼうの流体実験ラックでのマランゴニ対流の実験の成果により、[[国際宇宙空間研究委員会]](Committee on Space Research:COSPAR)と[[ロシア科学アカデミー]](Russian Academy of Sciences:RAS)が主催する「Zeldovich Medal」を、研究チームの[[横浜国立大学]]大学院の矢野大志助教が受賞している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/180814_marangoni.html|title=「きぼう」での流体実験の研究成果により、COSPAR 2018で"Zeldovich Medal"を受賞:「きぼう」での実験|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-08-14|accessdate=2018-11-28}}</ref><ref>{{Cite web|url=https://cosparhq.cnes.fr/awards/zeldovich|title=Zeldovich Medals|cospar|publisher=Committee on Space Research|date=2018-08-07|accessdate=2018-11-28}}</ref>。 |
|||
* 2018年7月26日 - きぼうの船外実験装置CALETでの研究とマウス実験の成果により、第7回ISS Research and Development Conferenceにおいて、アメリカのAmerican Astronautical Society(AAS)が主催するISS Research Awardsの「2018 ISS Award for Compelling Results」を受賞している<ref>{{Cite web|和書|url=https://iss.jaxa.jp/kiboexp/news/180727_iss_awards.html|title=「きぼう」で行われた日本の実験成果が、ISS R&D Conference において、"2018 ISS Award for Compelling Results"を受賞しました|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2018-07-27|accessdate=2018-11-26}}</ref>。 |
|||
* 2018年10月20日-10月21日 - マランゴニ対流の実験の成果により、一般社団法人日本機械学会が主催する熱工学コンファレンス2018にて行われた熱工学コレクション2018において「最優秀動画賞」を受賞している<ref>{{Cite web|和書|url=https://www.zaikei.co.jp/article/20181107/476427.html|title=JAXA、「きぼう」での対流実験により熱コレ2018で最優秀動画賞を受賞|publisher=[[財経新聞]]|date=2018-11-07|accessdate=2018-11-28}}</ref>。 |
|||
== 情報漏洩事件 == |
|||
=== 日本における評価 === |
|||
{{See|宇宙航空研究開発機構#情報漏洩事件}} |
|||
* 宇宙空間での実験設備に要求される高い機能性・安全性・操作性を実現したことが評価され、2010年度[[グッドデザイン賞]]において金賞を受賞した<ref>{{Cite web|url=http://www.g-mark.org/archive/2010/best15/10d06001.html|title=Good Design Award 2010 Results|date=2010-11-10|accessdate=2010-11-17|archiveurl=https://web.archive.org/web/20101003072325/http://www.g-mark.org/archive/2010/best15/10d06001.html|archivedate=2010年10月3日|deadlinkdate=2018年3月}}</ref>。 |
|||
== 運用上の不具合・故障など == |
|||
[[ファイル:Kibo Entrance, June 4, 2008.png|thumb|right|250px|船内実験室設置直後に大勢で押し掛ける宇宙飛行士達。まだ各ラックが設置されていないため広々としている。(2008年6月)]] |
|||
* 2008年6月5日 - 船内実験室設置直後に、空気調和装置の凝縮水熱交換器出口の水分検出器が自動で停止している。これは、船内実験室が通常2名、時間制限つきで4名在室できるよう設計されている<ref name="kibo mitsubishi seihin"/>のに対し、スペースシャトルの[[STS-124]]搭乗員7人とISSの[[第17次長期滞在]]搭乗員3人の計10人の宇宙飛行士全員が船内実験室に同時に集まってしまった<ref name="kibo 1j youyaku"/><ref>{{Cite web|和書|url=https://www.youtube.com/watch?v=o66bTkLHGio|title=ミッションダイジェスト「きぼう」第2回組み立てミッションSTS-124(1J)|publisher=7:43-7:52にかけて. YouTube JAXA公式チャンネル|date=2009-04-07|accessdate=2018-12-03}}</ref><ref>{{Cite web|和書|url=https://iss.jaxa.jp/iss/report/sts-124-09.html|title=STS-124 NASAステータスレポート#09:NASAステータスレポート(2008年まで)|publisher=JAXA宇宙ステーション・きぼう 広報・情報センター|date=2008-06-05|accessdate=2019-01-22}}</ref>ことにより、一時的に船内湿度が上昇したことなどが原因で水分検出器の自動停止機能が作動したためだと考えられている。前述のとおり、船内実験室はISS最大の与圧モジュールであり、ラック搬入前の船内実験室の広さに宇宙飛行士たちが「はしゃぎすぎた」のであった<ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2008/06/20080618_sac_iss.pdf|title=「きぼう」船内実験室打上げ・星出宇宙飛行士搭乗ミッションの結果について|publisher=7ページ目 【参考2】ミッション中の主な課題と対応. JAXA|date=2008-06-18|accessdate=2018-12-03}}</ref>。 |
|||
* 2010年4月21日18時頃、[[超伝導サブミリ波リム放射サウンダ]] (SMILES) の受信系の機器の一部が待機モードとなったため観測を中断した。その後の調査で、原因はサブミリ波局部発振器 (SLO) 内部の[[ガンダイオード|ガン発振器]]の配管内部に二酸化炭素が固着したことによる閉塞だと判明した。2011年1月19日に復旧を断念し運用を終了している<ref name="monbu smiles 20110119"/><ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2010/05/20100526_sac_smiles.pdf|title=超伝導サブミリ波リム放射サウンダ(SMILES)のサブミリ波受信系異常の現状について|date=2010-05-26|accessdate=2010-05-28}}</ref>。 |
|||
* 2010年5月13日、「きぼう」有償利用事業の第2回目のテーマに選ばれた「植物種子を活用した宇宙教育プロジェクトと商用利用の試み」<ref>{{Cite web|和書|url=https://www.jaxa.jp/press/2009/06/20090610_kibo_j.html|title=第2回「きぼう」有償利用テーマの選定結果及び追加募集について|publisher=JAXA|date=2009-06-10|accessdate=2018-12-09}}</ref>において、2009年8月より約8か月間軌道上で保管され、2010年4月に回収された[[カボチャ]]の種子2種類の内の1種類が所在不明となっていることが発覚した<ref>{{Cite web|和書|url=https://news.mynavi.jp/techplus/article/20100514-a020/|title=宇宙ステーションから持ち帰った植物種子が紛失 - JAXAが発表|publisher=[[マイナビニュース]]|date=2010-05-14|accessdate=2018-12-09}}</ref>。その後、所在不明とされていたカボチャの種子は、規定上1つのみしか宇宙へ持っていけないため軌道上に運ばれず、NASAジョンソン宇宙センターに残されていたことが確認されている<ref>{{Cite web|和書|url=https://www.shikoku-np.co.jp/national/science_environmental/20100617000216|title=カボチャの種、NASAで発見/宇宙に運ばれず|publisher=[[四国新聞社]]|date=2010-06-17|accessdate=2018-12-09}}</ref>。 |
|||
* 2018年7月18日16時頃、きぼう船内実験室で冷却水が僅かに漏れているのが見つかった<ref>[https://iss.jaxa.jp/topics/2018/07/20180731_atcs.html “「きぼう」船内の冷却水リークについて”]. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年7月31日). 2018年12月10日閲覧。</ref>。1日あたり0.025-0.03リットル漏れており、原因を調べたところNASAの米国実験ラック(EXPRESS Rack 5)内の配管から漏れていることがわかった<ref>[https://iss.jaxa.jp/topics/2018/08/20180813_atcs.html “「きぼう」船内の冷却水リークについて(続報)”]. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年8月13日). 2018年12月10日閲覧。</ref>ため、修理を実施している<ref>[https://iss.jaxa.jp/topics/2018/08/20180830_atcs.html “「きぼう」冷却水リークについて(続報)”]. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年8月30日). 2018年12月10日閲覧。</ref>。 |
|||
上記のような不具合などが起きてはいるが、きぼうの不具合件数は、打上げから36か月後の2011年3月までに75件となっており、これはアメリカの実験棟[[デスティニー]]の打ち上げから48か月後の2005年2月までの175件より、不具合件数の発生頻度が少なく良好な実績を示している<ref name="iss monbu 20140929">[https://www.mext.go.jp/component/b_menu/shingi/toushin/__icsFiles/afieldfile/2014/09/29/1352168_2.pdf “付録1 国際宇宙ステーション(ISS)計画概要”]. 文部科学省 (2014年9月29日). 2018年12月4日閲覧。</ref>。 |
|||
== 展示モデル == |
== 展示モデル == |
||
日本実験棟「きぼう」の展示モデルは、JAXA[[筑波宇宙センター]]の展示館「スペースドーム」内に、内部にも入れる実物大模型が展示されているほか、[[名古屋市科学館]]の屋外展示スペースに実際に開発に使われた船内実験室の構造試験モデルが展示されている<ref>[ |
日本実験棟「きぼう」の展示モデルは、JAXA[[筑波宇宙センター]]の展示館「スペースドーム」内に、1985年4月から行われた日本実験モジュールの予備設計時に作られた、内部にも入れる実物大模型(モックアップ)が展示されているほか{{sfn|JAXA『宇宙にかける「きぼう」』|loc=第5章 日本の宇宙実験システムJEM の技術開発 [Ⅰ] ―有人宇宙システム技術(与圧系)の開発と将来展望― 5-8}}<ref>[http://fanfun.jaxa.jp/visit/tsukuba/museum_j.html “筑波宇宙センター 展示館「スペースドーム」”]. JAXA. 2018年11月22日閲覧。</ref>、[[名古屋市科学館]]の屋外展示スペースに実際に開発に使われた船内実験室の構造試験モデルが展示されている<ref>[https://fanfun.jaxa.jp/c/media/file/media_jaxas_jaxas042.pdf “JAXA's No.042”]. JAXA (2012年1月1日). 2018年11月7日閲覧。</ref>。また、2014年7月19日-9月23日に[[幕張メッセ]]で行われた[[宇宙博2014]]に船外パレットの実機が展示されたことがある |
||
<ref name="sed space expo2014">[http://www.sed.co.jp/contents/topics/2014_spaceexpo3.html “「SPACE EXPO 2014」 宇宙博2014(SPACE EXPO)実機を見る 宇宙博2014見どころ3”]. 宇宙技術開発株式会社 (2014年8月27日). 2019年1月25日閲覧。</ref><ref>{{Cite web|和書|url=http://www.space-expo2014.jp/constitution|title=SPACE EXPO 宇宙博 2014|NASA・JAXAの挑戦|url-status=dead|url-status-date=2014-09-01|archiveurl=https://web.archive.org/web/20140901112211/http://www.space-expo2014.jp/constitution|archivedate=2014-09-01|accessdate=2019-01-25}}</ref>。 |
|||
== 登場作品 == |
|||
* [[A Beautiful Planet]] - ドキュメンタリー映画。ISSが舞台。 |
|||
* [[ゼロ・グラビティ (映画)|ゼロ・グラビティ]] - 映画。ISSでの場面で登場。 |
|||
* [[天穹のテロリズム]] - 小説。ISSが舞台。 |
|||
== 注釈 == |
== 注釈 == |
||
{{Reflist|group="注釈"}} |
|||
== 出典 == |
|||
{{脚注ヘルプ}} |
{{脚注ヘルプ}} |
||
{{Reflist}} |
{{Reflist|30em}} |
||
==参考文献== |
|||
* {{Citation|和書 |author=宇宙航空研究開発機構 |url=https://jaxa.repo.nii.ac.jp/records/4829 |title=国際宇宙ステーション計画参加活動史 : 宇宙にかける「きぼう」 |publisher=宇宙航空研究開発機構特別資料 |issue=レポート番号: JAXA-SP-10-007 |year=2011 |series=宇宙航空研究開発機構特別資料 |ref={{harvid|JAXA『宇宙にかける「きぼう」』}}}} |
|||
* {{Citation|和書 |author=宇宙航空研究開発機構 |url=https://jaxa.repo.nii.ac.jp/records/4175 |title=国際宇宙ステーション日本実験モジュール「きぼう」で獲得した有人宇宙技術 |publisher=宇宙航空研究開発機構特別資料 |issue=レポート番号: JAXA-SP-12-015 |year=2013 |series=宇宙航空研究開発機構特別資料 |ref={{harvid|JAXA『「きぼう」で獲得した有人宇宙技術』}}}} |
|||
== 関連項目 == |
|||
* {{ill2|Int-Ball|en|Int-Ball}}(正式名称:JEM自律移動型船内カメラ) - JAXAが開発し、2017年に1号機をISSのきぼうモジュールに送った自律移動可能な球形の船内カメラ。 |
|||
== 外部リンク == |
== 外部リンク == |
||
* [http://www.mext.go.jp/b_menu/shingi/uchuu/index.htm 文部科学省HP内、宇宙開発委員会の概説] |
|||
{{Commons|Category:Japanese Experiment Module}} |
{{Commons|Category:Japanese Experiment Module}} |
||
{{Wikinews|国際宇宙ステーションの日本実験棟「きぼう」が完成}} |
{{Wikinews|国際宇宙ステーションの日本実験棟「きぼう」が完成}} |
||
* [ |
* [https://iss.jaxa.jp/index.html 宇宙ステーション・きぼう広報・情報センター] |
||
* [ |
* [https://iss.jaxa.jp/kibo/ 「きぼう」日本実験棟] - [[JAXA]] {{ja icon}} |
||
* [https://iss.jaxa.jp/kibo/library/fact/data/kibo-handbook.pdf 「きぼう」ハンドブック] |
|||
* [https://iss.jaxa.jp/kibo/library/fact/data/pmhandbook.pdf 「きぼう」船内実験室利用ハンドブック][https://iss.jaxa.jp/kiboexp/participation/application/documents/pm02/pmhandbook.pdf 初版] |
|||
* [https://iss.jaxa.jp/kibo/library/fact/data/JFE_HDBK_all.pdf きぼう船外実験プラットフォーム利用ハンドブック][https://iss.jaxa.jp/kiboexp/participation/application/documents/ef02/handbook.pdf 初版] |
|||
* [http://www.nasa.gov/mission_pages/station/structure/elements/jem.html Kibo Japanese Experiment Module] - [[アメリカ航空宇宙局]] {{en icon}} |
* [http://www.nasa.gov/mission_pages/station/structure/elements/jem.html Kibo Japanese Experiment Module] - [[アメリカ航空宇宙局]] {{en icon}} |
||
* [ |
* [https://jpn.nec.com/techrep/journal/g11/n01/pdf/110107.pdf 宇宙特集国際宇宙ステーション日本実験棟「きぼう(JEM)」の開発] - NEC技報 Vol.64(2011年) No.1(3月) |
||
* [http://www.mhi.co.jp/technology/review/pdf/454/454021.pdf 宇宙ステーション日本実験モジュール“きぼう”の打上げ及び長期有人運用の開始] - 三菱重工技報 2008年 VOL.45 NO.4 |
|||
* [http://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/04/24/1344413_02.pdf 国際宇宙ステーション(ISS)計画概要] 2014年4月22日 宇宙開発利用部会 国際宇宙ステーション・国際宇宙探査小委員会(第1回)配付資料(PDF:3.2MB) |
|||
* [https://www.mext.go.jp/b_menu/shingi/gijyutu/gijyutu2/071/shiryo/__icsFiles/afieldfile/2014/04/24/1344413_02.pdf 国際宇宙ステーション(ISS)計画概要] - 2014年4月22日 宇宙開発利用部会 国際宇宙ステーション・国際宇宙探査小委員会(第1回)配付資料(PDF:3.2MB) |
|||
{{国際宇宙ステーション}} |
{{国際宇宙ステーション}} |
||
{{ |
{{DEFAULTSORT:きほう}} |
||
[[Category:国際宇宙ステーション]] |
|||
[[Category:JAXA]] |
[[Category:JAXA]] |
||
[[Category:日本の宇宙開発]] |
|||
[[Category:国際宇宙ステーション]] |
|||
[[Category:2008年の宇宙飛行]] |
|||
[[Category:2009年の宇宙飛行]] |
|||
[[Category:実験]] |
[[Category:実験]] |
||
2024年12月1日 (日) 13:38時点における最新版



きぼう(KIBO)は、宇宙航空研究開発機構 (JAXA) が開発した日本の宇宙実験棟で、国際宇宙ステーション (ISS) を構成する部位の1つ[1]。ISSでは最大の実験棟で[1]、通称は「きぼう」日本実験棟[2]。計画時の呼称はJEM(Japanese Experiment Module:日本実験棟)[3]。日本で初めての軌道上研究所と位置付けられている[4]。エアロックやロボットアームを備え[1]、ISSでは唯一、重量50キログラム程度までの超小型人工衛星を軌道投入できる機能を有し、JAXAが各国から衛星射出を受託している[5][6]。
概要
[編集]
「きぼう」は日本初となる有人宇宙実験施設[1]で、日本が宇宙ステーション計画への参加を決めた1985年に当時の宇宙開発事業団(NASDA、現JAXA)を中心に開発が始まり[2][7][8][9]、完成した各部位はアメリカへ輸送された後[10]、スペースシャトルで3回に分けて打ち上げられ[11]、2009年7月19日に24年の歳月をかけ完成した[12]。開発費用は、きぼう本体に約2,500億円、きぼうに搭載する実験装置に約450億円、地上施設開発費と宇宙飛行士訓練費とシャトルによるきぼう打ち上げ費に約2,360億円である[13]。
「きぼう」は、実験を行う「船内実験室」と「船外実験プラットフォーム」、倉庫となる「船内保管室」、船外機器などを輸送する「船外パレット」、実験装置の交換などを行う「ロボットアーム」、地上との双方向通信でデータなどをやり取りする「衛星間通信システム」の6つで構成されており[14]、全部位の結合時の大きさは長さ20.5m、高さ8.6m、幅8.9m、重さ約26トンになる[15]。きぼうの部品総点数は約200万点に及ぶ[16]。
現行のIGA(宇宙基地協力協定)5条(登録・管轄権)により、日本は宇宙物体として登録した「きぼう」「HTV(こうのとり)」と日本人宇宙飛行士・宇宙旅行者等に対し管轄権及び管理の権限を有している[注釈 1][17]。
「きぼう」の利用に関しては、アメリカとカナダは基盤要素となる電力と居住機能(アメリカ)、ロボットアーム(カナダ)を提供しているため、「きぼう」の利用権をアメリカが46.7%、カナダが2.3%持っており、日本の利用権の割合は51%となっている(船内実験室、船外実験プラットフォーム共[18])[19]。従って、日本は船内実験室の実験ラック10個と船外実験プラットフォームの実験装置10個の内、それぞれ常時5個(51%)ずつ設置でき、残りの5個はNASAが設置できる[18][20][21]。また、日本が得ている電力・搭乗員作業時間(クルータイム、年約200時間)・地上との通信・物資輸送(打ち上げ重量約400kg、回収重量150kg)などのアメリカ側の利用用資源は12.8%で、宇宙飛行士の搭乗権配分も12.8%[注釈 2][22]となっている[18][19][23]。これらの権利の対価として、日本には「きぼう」の開発・維持・運用・運用管制などを行う責任があり、船内実験室の軌道上での検証後は共通システム運用経費(Common System Operations Costs:CSOC)[注釈 3]の分担義務が発生するため、HTV(こうのとり)での物資輸送による現物提供を以て負担している[19][24]。
1985年に開発が始まった当初、「きぼう」の開発の意義・目標として「高度技術の習得」「次世代の科学や技術の促進と宇宙活動範囲の拡大」「国際協力への貢献」「宇宙環境利用の実用化の促進」の4つが示されており[2]、本格的な運用が始まった2008年8月以降[25]各種実験や利用[26]により様々な成果が上がっている[27]。日本政府は2015年12月22日に、国際宇宙ステーションが2024年まで運用が延長されるのに伴い、アメリカ政府との協議で延長に参加することで合意しており、「きぼう」も2024年まで運用を行う予定となっている[28][29]。
開発
[編集]開発の歴史
[編集]※宇宙ステーション全体の計画経緯は、フリーダム宇宙ステーションも参照。




宇宙ステーション計画は、NASAの宇宙ステーションタスクフォースが1982年(昭和57年)5月に設けられ、そこで宇宙ステーション計画の概念設計が始まり、同年6月にジェームズ・ベッグスアメリカ航空宇宙局 (NASA) 長官から日本の中川一郎科学技術庁長官へ、初めて宇宙ステーション計画への参加要請が行われた[9]。これを受けて同年8月、日本政府は宇宙開発委員会に宇宙基地特別部会[注釈 4][2]を設置して検討を開始し[9]、1983年6月に宇宙基地特別部会の中間報告が出された段階で日本実験モジュール(JEM)の基本概念はほぼ出来つつあったJAXA『宇宙にかける「きぼう」』, 第12章 JEM 曝露部利用(科学と技術開発)への取り組み 12-9。
その後、1984年1月25日にアメリカのレーガン大統領が年頭一般教書演説において、10年以内に恒久的な有人宇宙基地の建設を指示すると明言し、そして同年6月に行われたロンドンサミットにおいて、日本、カナダ、欧州に対して宇宙ステーション計画への参加を要請し、これにより現在に続く宇宙ステーション計画が本格的に動き出した[9][31]。1984年の段階で独自開発ではなくNASAから共通モジュールを買う意見も出たが退けられている[32]。
検討を重ねてきた宇宙基地特別部会は、1985年4月に公表した「宇宙基地計画参加に関する基本構想」において宇宙ステーション計画に日本が参加することを正式に表明し、日本は実験モジュール(JEM)を設置することで計画に参加することを決定した[2][8]。これを受けて同年5月には、NASAと科学技術庁の間で宇宙ステーション予備設計段階協力の了解覚書(Memorandum of Understanding:MOU)が署名され、宇宙開発事業団(NASDA)が実施機関として参加することになり[8]、55億円の開発研究予算が認可され[8]、日本実験モジュールの予備設計に着手した[2][9]。
計画への参加を表明した日本は、宇宙開発事業団(NASDA)を中心に開発を担うことになったが[8]、当時のNASDAには有人宇宙開発に関する部署がなかったため、小さな会議室を割り当てた上で、ロケットや人工衛星の開発に従事していた人員、白木邦明元JEMプロジェクトマネージャーをはじめ3人のみで開発が始まった[33]。
日本実験モジュールの予備設計は1987年3月に完了し[2]、1987年度から日本実験モジュールの開発予算が計上されたものの[34]、IGAが国会で承認されるまでは予備設計の延長作業などが行われた[34]。そして、1988年9月に宇宙基地に関する多国間協力協定(旧IGA、1998年1月に新IGAとなる「民生用国際宇宙基地のための協力に関するカナダ政府、欧州宇宙機関の加盟国政府、日本国政府、ロシア連邦政府及びアメリカ合衆国政府の間の協定」[35](改正宇宙基地協力協定)に改定[36])が署名され、1989年6月22日に「常時有人の民生用宇宙基地の詳細設計、開発、運用および利用における協力に関するアメリカ合衆国政府、欧州宇宙機関の加盟国政府、日本国政府およびカナダ政府の間の協定(Intergovernmental Agreement:IGA)」が国会で承認された。これにより、当時フリーダムと呼ばれた[注釈 5][4]国際宇宙ステーション計画は予備設計段階から開発段階へと移り、日本の実験モジュールの開発も本格的に始まった[9][31]。
日本は実験モジュールの予備設計に入った1985年4月の段階で、既に与圧部(現在の船内実験室)と曝露部(現在の船外実験プラットフォーム)、それぞれの補給部(船内保管室と船外パレット)とロボットアームからなる構成が示されており[7][37][38]、1987年4月から1991年にかけて何度も行われたアメリカによる宇宙ステーション基準概念の変更(1987年-1989年にリフェージング(Rephasing)、1990年-1991年にリストラクチャリング(Restructuring))[39][40]への対応で1991年5月に示された日本実験モジュールの最終コンフィギュレーションが元である、現在の「きぼう」と概略的には違いはない[37]。宇宙ステーションの全体計画が大きく変化し[39]、アメリカや欧州の各モジュールの規模が大幅に縮小される中[41]、日本実験モジュールの基本構成はほとんど変わらなかった[37]。
宇宙ステーションの全体設計はNASAによって繰り返し見直され[37][39]、完成時期も何度も延期されてきた[41]中で、日本側は翻弄され日本実験モジュールも大きな影響を受けた[39][42]。
特に、1993年2月のクリントン大統領による計画縮小の指示による変更と、ロシアの参加で日本実験モジュールは大きな影響を受けた。急遽編成された国際宇宙ステーション計画の再設計チーム(Station Redesign team:SRT)は、リデザイン(Redesign)と称して見直し案を90日間で3つ立案(α:アルファ、β:ベータ、γ:ガンマ、の3案[43])し、大統領諮問委員会(Blue Ribon Panel)の答申を受けたクリントン大統領はこの3つの案の中からフリーダムを簡素化した案を選び、最終的に「デザインα(軌道傾斜角は28.5度、搭乗員は4人のまま[44])」として再設計された案を軸に建設が進められることになった[9][31]。
それまでの計画では、宇宙ステーションの進行方向前側に居住モジュールとスペースシャトルのドッキング装置が、後側に日本と欧州宇宙機関(ESA)の実験モジュール(現在のきぼうとコロンバス)を設置する計画だったが、この見直しによりISSから日本実験モジュールへの電力供給が減ったため、その見返りに日本実験モジュールの設置場所がコロンバスと共にISSの汚染環境が最もひどい後方から進行方向側最前方に変更され、曝露実験の環境としては最適な位置となった[40][45]。その反面、進行方向と平行に設置される予定だったものが横向きに変更された上、この場所はデブリの衝突を受ける可能性が高く、しかもモジュール側面を大きく晒すことになったため、きぼうは船体の壁の厚さを当初の3.2mmから4.8mmに厚くした上で、デブリシールドと呼ばれる外部装甲板(デブリバンパー)の厚さを増すなどして強化することとなった[45]。加えて、この場所は太陽の日射量の変化が激しいため、厳しい温度変化に対応すべく船内実験室の大規模な熱制御システムの開発も行われることとなった[45]。
更に、1993年12月6日に行われたワシントンでのIGA政府間協議において、ロシアの国際宇宙ステーション計画への招請が決まり、同月にこの招請を受諾したロシアがISS計画に参加することになったが、それに伴う新しい計画であるロシアンα(アルファ、搭乗員が6人へ)への変更により、ロシアの射場からISSへロケットを打ち上げられるようにするため、ISSの軌道傾斜角が当初の28.5度から51.6度に変更されることになった[9][38][45][46][47]。
この結果、日本実験モジュールをスペースシャトルで打ち上げるにあたり、軌道傾斜角が増したことによりスペースシャトルでの打ち上げ可能質量が減ったため、1995年6月に組み立て順序が改訂され、当初は1回目でロボットアームを取り付けた日本実験モジュール与圧部(現船内実験室)、2回目がそれ以外の計2回を予定していた日本実験モジュールの運搬回数が3回に分けて運ばれることになった。また、与圧部を内装した状態では打ち上げられないため、日本実験モジュール補給部(現船内保管室)に冗長系システム機器を入れて与圧部より先に打ち上げられることになった[9][38][45][46][47]。その反面、この軌道傾斜角が増えたことにより船外実験プラットフォームに設置される後述のMAXIやSMILESなどの全天観測及び地球全周観測が目的の実験機器にとっては都合の良い条件となった[40]。
このように、紆余曲折を経ながらも日本実験モジュールの規模自体は縮小されず現在のきぼうに至っている[38]。なお、1995年3月にジョンソン宇宙センターで行われた宇宙ステーションの第1回目の設計審査(Incremental Design Review#1:IDR)で、宇宙ステーション計画の名称が「フリーダム宇宙ステーション(SSF)」から現在の「国際宇宙ステーション(ISS)」と呼ばれるようになった[注釈 6][9][43][4]。
開発の過程
[編集]

「きぼう」の開発は各構成要素ごとに、「開発基礎試験」、「エンジニアリングモデル(Engineering Model:EM)製作試験」、「プロトフライトモデル(Proto Flight Model:PFM)製作試験」の3段階に分けて行われているが[49]、最初に取り組まれたのは使いやすさや圧迫感がないかといった宇宙ステーションに滞在する宇宙飛行士の快適性を考えた心理学的な技術要求を明らかにすることから始まった[50]。
「開発基礎試験」では、各構成要素の構造や機能の検討を行い、また、実物大模型(モックアップ)や宇宙用部品でなく地上の民生品や材料を使ったブレッドボードモデル(Bread Board Model:BBM)を製作して、アクセス性評価試験など各種試験を行い、基本的な設計の実現性を確認するためのデータを取得し、問題点の洗い出しを行い解決している[49]。
「エンジニアリングモデル製作試験」では、実機(フライトモデル)とほぼ同じ形態の技術試験モデルを作り、設計や製造工程の妥当性を確認するための各種試験を行いデータを取得し、 機械的・電気的な設計仕様、試験方法、製造工程の確立を行った。問題点・欠陥の洗い出しのため、実際の運用条件より厳しい過剰な負荷を与える試験も行われている。このエンジニアリングモデル製作試験は、筑波宇宙センターで行われた各構成要素を結合しての全体システム試験が1998年10月に終わったことにより完了している[49]。
「プロトフライトモデル製作試験」では、実際にISSに設置される実機モデルが「エンジニアリングモデル製作試験」の時に確立された設計仕様・製造工程で製作され、実際の運用条件での各種試験が行われ、材料や製作上の欠陥がないことを確認している[49]。
この実機モデル製作の流れは、各部品のフライト品が完成すると各要素ごとに組み立てと音響試験、モーダルサーベイ試験、熱真空試験、電磁適合性試験など10種類以上の試験[49][51][52]が行われた。各要素の検証作業が終わると筑波宇宙センター宇宙ステーション試験棟[53]に各要素を集めたうえで結合させ、各部の統合試験[53]が行われた他、ISS本体とのインターフェース試験などを行う「きぼう」日本実験棟の全体システム試験[53](2001年9月-2002年5月[52])、モジュールリーク試験などが行われた[54]。これが終わると、きぼうは3回に分けて打ち上げられるため、各打ち上げコンフィギュレーションの試験が行われた[55]。
この試験が終わった後、船内実験室が2003年4月22日から6月6日にかけて[56][57]、船内保管室、ロボットアーム、実験ラックが2006年12月から2007年3月にかけて[58]、船外実験プラットフォーム、船外パレットが2008年9月19日から9月24日にかけて[59]ケネディ宇宙センターへと輸送されている[55][60]。ケネディ宇宙センターに到着後、各要素は宇宙ステーション整備施設(Space Station Processing Facility: SSPF)に搬入され、JAXAやNASAによる適合性確認試験(Multi-Element Integration Test-III:MEIT-III)[56]などの各種試験や打ち上げ前の整備作業が行われ後スペースシャトルで打ち上げられた[61]。
なお、きぼうの開発では実機の開発製造だけでなく、打ち上げ後の軌道上での組立手順や宇宙飛行士の移動方法などの開発も行われており、筑波宇宙センター無重量環境試験棟(Weightless Environment Test Building:WET)内の無重量環境試験設備の1つである直径16m、深さ10.5mの無重量環境模擬水槽(Weightless Environment Test System:WETS)[注釈 7][62][63]にて、「きぼう」の実物大模型(モックアップ)を水中に設置して船外活動手順開発試験が2000年1月[64]-2005年11月にかけて6回に分けて行われた[48][65]。ここでは他に船外活動無重量シミュレーション試験も行われている[48][66]。
名称
[編集]「きぼう(KIBO)」という愛称は1999年4月に宇宙開発事業団(当時)が「JEM」の愛称を公募して決まったもので[2]、漫画家の松本零士や向井千秋宇宙飛行士などが選考委員を務め、2万227人に上る応募者の内、「きぼう(KIBO)」で応募した総数は132人であった[67]。宇宙開発事業団から組織改編された宇宙航空研究開発機構が、応募者名簿を2005年4月の個人情報保護法施行の際に独自の判断により破棄したことが2008年3月22日に判明し、「きぼう」の命名者も一時不明になっていたが[67]、同3月25日に筑波宇宙センターの資料保管庫で再発見されている[68]。また、2000年5月にきぼう各部の通称が決まり、与圧部が「船内実験室」に、曝露部が「船外実験プラットフォーム」に、マニピュレーターが「ロボットアーム」に、補給部与圧区が「船内保管室」に、補給部曝露区が「船外パレット」に、そしてJEMは「「きぼう」日本実験棟」にそれぞれ決まっている[2]。
費用
[編集]1984年4月にNASDAが科学技術庁に提出した資料では、実験モジュールと共通実験装置の開発費が約3,000億円弱、実験装置開発費を除く年間運用利用費は約300億円強で、スペースシャトル1回の打ち上げ費は8,300万ドル(1984年レート、1ドル230円)と見積もっている[69]。また、1986年の段階で推定された開発費は、1987年度以降に日本実験モジュールの開発費が約2,600億円、宇宙環境利用共通技術や共通実験装置開発費などに約450億円と見積もられ、日本実験モジュールの打ち上げ費は実費支弁契約が想定された[70]。
実績値としては、きぼうの運用と利用を主たる目的とした日本における国際宇宙ステーション計画の2010年までの総費用は約7,100億円で、その内訳は、きぼう開発費に約2,500億円、きぼう実験装置開発費に約450億円、HTV開発費(技術実証機の建造費含む)に約680億円、地上施設開発費と宇宙飛行士訓練費とシャトルによるきぼう打ち上げ費に約2,360億円、運用費(管制・保全など)と利用費(実験関連費)に約1,100億円である。なお、ここにはH-IIBロケットの開発費は含まない[13][71]。
2011年以後の1年毎の日本の国際宇宙ステーション計画費用は約400億円で、その内訳は、運用費(管制・保全・宇宙飛行士訓練など)に約90億円、利用費(実験関連費)に約60億円、物資輸送費(H-IIBによるHTV(こうのとり)打ち上げ)に約250億円である[13]。日本の宇宙開発費のうちJAXA独自の予算は毎年約1,800億円であり、毎年約400億円の支出となる国際宇宙ステーション計画費用は日本の宇宙開発予算の中で情報収集衛星に次ぐ比重を占めている[71]。ただ、2010年以降は日本の負担するISS関連経費は減少傾向にあり[19]、2018年度は約342億円となっている[72]。
(各国ごとの支出は国際宇宙ステーションを参照。)
開発担当企業
[編集]主要な開発担当企業は以下の通り[73]。
- 三菱重工業 - 与圧部(船内実験室・船内保管室)・全体の取りまとめを担当[74][75]。
- 石川島播磨重工業(現IHI) - 曝露部(船外実験プラットフォーム)・国際標準実験ラック(ISPR)・熱制御系の一部・実験支援系(共通ガス供給装置(Common Gas Supply. Equipment:CGSE))・実験データ処理装置(Payload Data Handling unit:PDH)を担当[76][77]。
- 日産自動車(現アイ・エイチ・アイ・エアロスペース) - 曝露部(船外パレット)を担当。
- 川崎重工業 - エアロック・EF/PM結合機構・環境制御装置(船内実験室用空気調和装置、船内保管室用空気循環ファンなど)を担当[78]。
- NEC東芝スペースシステム(現NECスペーステクノロジー) - ロボットアーム親アーム・衛星間通信システム(Inter-orbit Communication System:ICS)与圧系サブシステム及び曝露系サブシステム・きぼうのメインコンピューターの管制制御装置 (JEM Control Processor:JCP)・ネットワークシステム・実験装置[79][80]。
- 日立製作所 - ロボットアーム子アームを担当。
- 三菱電機 - 電力系(Electrical Power System:EPS)・テレビモニターを担当。
地上運用には、有人宇宙システム株式会社、ソラン(現TIS)、株式会社エイ・イー・エス、三菱スペース・ソフトウエア、宇宙技術開発株式会社などが関わっている。また、NTTデータ、三菱プレシジョン、三菱電線工業、横浜ゴム、メイラ、大陽日酸、中菱エンジニアリング、西菱エンジニアリング(現MHIニュークリアシステムズ・ソリューションエンジニアリング)、光製作所、MHIエアロスペースシステムズ、ミネベアなどの企業[81]の他、株式会社田中(現SDC田中、大阪市)や川西航空機器工業(兵庫県)、東成エレクトロビーム(東京都)、竹中システム機器(京都府)、瑞木製作所(愛知県)などの中小企業も開発に携わっている[82]。
きぼうの開発・運用に参加している企業は約650社で[38][73]、国内の宇宙に携わるほぼ全ての企業が参加している[81]。また、2013年までにきぼうの運用に約380社、利用に約350社が参加している[83]。
打ち上げと組み立て
[編集]




「きぼう」はスペースシャトルによって3回に分けてISSに運ばれ組み立てられた[11]。これは、日本がISS計画への参加を表明した1985年当時から、日本の実験モジュールをスペースシャトルで打ち上げることが決まっていたためで、スペースシャトルの貨物室の寸法・打ち上げ能力に合わせて大きさや重さが設計されている[84]。当初の「きぼう」の打ち上げ時期は、1986年3月下旬に行われた宇宙ステーション全体のシステム要求審査(System Requirement Review:SRR)の段階で、合計14回と設定されたスペースシャトルの打ち上げを3段階に分けた内の3段階目となる1994年であった[70]。
しかし、アメリカの杜撰な開発管理に端を発する宇宙ステーション計画の度重なる変更や[39]、アメリカの財政悪化に伴う宇宙ステーション計画の変更やロシアの参加[44]、ロシアのサービスモジュールの開発遅延[9][85]など、さまざまな理由で幾度となく「きぼう」の打ち上げ時期や見通しが変更されてきた[9][39][86]。
その後、2003年(平成15年)2月にスペースシャトル「コロンビア」が空中分解、乗組員全員が死亡する事故が発生したため、ISSの建設が遅れると同時に「きぼう」の打ち上げ時期もさらに遅れることとなった[84]。またアメリカ航空宇宙局 (NASA) はシャトル運用を2010年までとしたため[9](その後退役が延期され、2011年8月31日にスペースシャトルプログラムは正式に終了している[87]。)、2011年7月21日にISSの建設は終了し完成した[88]。スペースシャトル打ち上げ再開後の「きぼう」の打ち上げ時期については、4つあるISSの太陽電池パネル設置前に「きぼう」を取り付けると電力が足りなくなる恐れがあったため、NASA側は打ち上げを遅らせたい意向を示していたが、JAXAは早く打ち上げるよう交渉し[84]、2006年3月2日に行われた国際宇宙ステーション計画に関する宇宙機関長会議によって2007年(平成19年)から2009年(平成21年)に打ち上げることで最終合意している[89][注釈 8]。これにより最後の太陽電池パネルよりも先に船内実験室が打ち上げられることになった[84]。
この合意に基づき、「きぼう」初の打ち上げ要素となる船内保管室は、2008年3月11日に打ち上げられたスペースシャトル「エンデバー」でのミッションSTS-123で宇宙に運ばれ、同月14日国際宇宙ステーションに取り付けられ、翌15日から運用が始まった(日付は全て日本時間)[90]。
続いて同年6月のディスカバリーによるミッションSTS-124で船内実験室及びロボットアームを設置し[91]、2009年7月に打ち上げられたエンデバーによるSTS-127で、船外実験プラットフォームが取り付け・起動が完了した同7月19日11時23分に「きぼう」は完成した[12][92]。
各種動作確認で機能にも問題がないことが確認され、本格的な運用を開始した[12][91]。2009年9月には、宇宙ステーション補給機 (HTV) による実験装置と物資の輸送が始まった[93]。2010年2月24日の衛星間通信システム (ICS) の本格稼働[94]、3月の子アームの設置をもって、基本要素の設置は終了した[95]。
設置にあたって、船内実験室はスペースシャトルが打ち上げるISSモジュールの中でも最大であり[1]、搭載空間の問題から打ち上げ時のスペースシャトルにセンサ付き検査用延長ブーム (Orbiter Boom Sensor System:OBSS) を搭載できなかった[96][97]。このため、ひとつ前のフライトで船内保管室を輸送した際に、OBSSをISSに残して帰還し、次のフライトでこれを回収して使用することでスペースシャトルの熱防護システムの点検を行う苦肉の策が取られた[96][97][98]。また、打上げ時に船内実験室に搭載するラックも最小限とせざるを得ないため、システム機器用ラック(システムラック)のうち5台と実験ラック2台、保管ラック1台は事前に船内保管室でISSに輸送した[99][100]。船内実験室とともに打ち上げられるシステムラックだけでは片系統のみのシステムしか起動できないが、船内保管室から上記ラックを移設することで、有人運用に必要な2系統のシステムを構築できるようにした[47]。
- ミッションナンバー:STS-123、打ち上げオービター「エンデバー」
- 打ち上げ部位:船内保管室
- 打ち上げ日時:2008年(平成20年)3月11日15時28分(日本時間)
- JAXA任務飛行士:土井隆雄(保管室の取り付け及び室内の設定作業)
- 1J/Aは日本と米国のISS機材を同時に運ぶミッションの1回目を表している。米国側機材は特殊目的ロボットアーム「デクスター」。
- 船内保管室には実験ラックなどが積み込まれた状態で打ち上げられ、一時的にハーモニー天頂側結合部に設置された。
- ミッションナンバー:STS-124、打ち上げオービター「ディスカバリー」
- 打ち上げ部位:船内実験室、ロボットアーム
- 打ち上げ日時:2008年(平成20年)6月1日6時2分(日本時間)
- JAXA任務飛行士:星出彰彦(実験室の取り付け及び室内の設定作業)
- 1Jは日本の機材のみを運ぶミッションの1回目を表す。
- 船内実験室をハーモニー左舷側に設置後、船内実験室を起動し、ラックの搬入を行い、船内保管室を船内実験室天頂側に移設した。
- ミッションナンバー:STS-127、打ち上げオービター「エンデバー」
- 打ち上げ部位:船外実験プラットフォーム、船外パレット、衛星間通信システム(ICS-EF)
- 打ち上げ年月日:2009年(平成21年)7月16日7時3分(日本時間)
- JAXA任務飛行士:若田光一(2009年3月にSTS-119で出発。第18/19/20次長期滞在クルーとしてISSに4ヶ月半滞在。打ち上げ各部位の船体取り付け及び設定作業。本任務終了後、STS-127にて帰還した。)
- 日本と米国による2回目の打ち上げ。米国側ペイロードはISSの交換用のバッテリーと、その他の曝露機器の予備品
- 船外パレットは回収した。
-
 1J/Aミッション後
1J/Aミッション後 -
 1Jミッション後
1Jミッション後 -
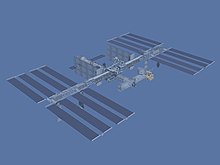 2J/Aミッション後
2J/Aミッション後



船体
[編集]「きぼう」は与圧部である船内実験室 (PM) と船内保管室 (ELM-PS)、曝露部の船外実験プラットフォーム (EF) と船外パレット (ELM-ES)、きぼう専用マニピュレーターのロボットアーム (JEM-RMS)、衛星間通信システム (ICS) といった6つの主要部位で構成されている[105]。すべてを結合した状態での、きぼうの全長は20.5m(ロボットアーム除く)、全高8.6m(船外実験プラットフォーム除く)、全幅8.9m(船外パレット、ICS-EF含む)、重さ約26トンであり[15]、国際宇宙ステーション(ISS)の中で最大の実験モジュールとなっている[1]。






船内実験室 (PM)
[編集]船内実験室 (Pressurized Module:PM)は、きぼうの中心となる部位[14]。地上と同じ1気圧の空気が保たれ、宇宙飛行士は普段着で過ごせ、最大4名が同時搭乗できる[14][106]。主に微小重力環境を利用した実験を行う[14]。内部にはきぼう全体のシステムを管理・制御する装置のラックと実験設備が備えられた国際標準実験ラックの合わせて23個のラックを設置できるよう設計されており、そのうち10個は実験ラックを予定している[106]。きぼうの主要システムは、ラックも含めてA系とB系の二重冗長構成になっている[107]。船内実験室の四隅にはスタンドオフ部と呼ばれる各ラック間の隙間部分があり、ここに電力などの各種リソース供給のための配管・配線などがハーモニー側に向けて艤装されている[108]。ラックなどが運び入れられると、宇宙飛行士が活動できる空間は約2.2m四方となり[109]、クルー支援系設備として各所に多数の足拘束具であるフット・レストレイント(Foot Restraint)とハンドレールが設置されている[109]。空気吹き出し口は照明と交互に10か所以上設けられており、空気吸い込み口は床側両端にある青線上に10か所以上設けられている[106][108]。
船内と船外実験プラットフォームとの間で実験装置や交換用の機器などの出し入れに使う円筒形のエアロックも装備されているが、寸法が小さいため宇宙服を着た人間の出入りはできない。室内側の上部に小窓のついているハッチは内側ハッチと呼ばれ小窓を通して中の様子を確認でき、宇宙空間側のハッチは外側ハッチと呼ばれ、安全のため2つのハッチが同時に開かない仕組みとなっている[110]。内側ハッチは手動で開閉されるが外側ハッチは基本的に電動により開閉され、ボタンでハッチが自動的に開閉するオートモードと、1つ1つボタンを押しながら開閉手順を確認して開閉するマニュアルモードの2種類あり、電力供給がなくなるなどの緊急時には船内実験室側から手動で開閉できるようになっている[110]。物資を搬出する際には、エアロック内の移動テーブルに取り付けて伸展させることにより出し入れ行う[111]。これらを使用して、地球観測、材料の実験や製造、生命科学(宇宙医学・バイオなど)、通信などの実験が行われる。このエアロックは、使用時にエアロック内の空気を船内に回収できる機能があり、3時間でエアロック内の空気の約8割を回収できる[112]>。
船内実験室は船内保管室と共にほとんどが高張力アルミ合金を用いた溶接一体構造となっている。空気漏洩対策として貫通部のシール全てが2重以上(与圧部間のOリングシールは3重[113][114])になされており、漏洩が起きてもシールを後から追加で取り付けられる構造となっていて、大きさが6インチ以上の漏洩時の影響が大きいシールは、測定孔が設けられ個別に漏洩確認ができるようになっている。筑波宇宙センターで行われた真空槽に入れての気密試験では、1年間に100リットル程度の漏洩量という試験結果が出ており、アメリカの実験棟より1桁少なく良好な結果を示している[115]。また、2004年1月に起きたアメリカ実験棟にある2重ガラス窓の曇り防止のために設けられている空気排出用のジャンパホースを宇宙飛行士が何回も掴んだことによる空気漏洩事故により、まだ打ち上げ前の「きぼう」は対策として白いカバーをジャンパホースごと窓のある壁面を覆っている[115]。
他モジュールとの接続部分である共通結合機構(Common Berthing Mechanism:CBM)は、国際宇宙ステーションの共通部品であるためアメリカ・ボーイング社が製造しており、船内実験室側のアクティブCBMに船内保管室側のパッシブCBMが接続しており、船内実験室側のパッシブCBMにハーモニー側のアクティブCBMが接続している。結露防止対策として外壁構造にヒーターが設けられていて、カビや微生物の繁殖を抑える塗装が施されている[113][116]。
窓はエアロックの左右に1つずつ合計2つあり[117]、通常はシャッターで閉じられているが[118]、丸いハンドルを回すことで手動で開閉できる[119]。当初、窓はロボットアームを操作する際、2人の内1人がディスプレイ越しに操作を行い、もう1人が肉眼でロボットアームの動きを見て補助をするのに用いるため設計に盛り込まれた。ところが、ロボットアームがディスプレイだけで操作ができるほど高性能だったため、必要性がなくなり開発費などの節減も含めて窓の削除が提起されたが、窓がない閉鎖空間で勤務する宇宙飛行士たちの心理的側面を考慮し窓の削除案は退けられている[50]。また、キューポラが設置されるまでは地球を眺められる窓は「きぼう」やズヴェズダなどしかなく[120]、よく宇宙飛行士が訪れていたという[50]。
壁面の色は、やや灰色がかったオフホワイトが採用されている。これは壁面の色を決めるにあたって、約100人の被験者を集めて「きぼう」の小型模型で実験を行い、また、様々な国籍・人種の宇宙飛行士にストレスを与える要因がなく、新機材などによる内部の変化に調和しやすい色が考慮された結果である[50]。
照明に関しては、当初は4面全てに照明を設ける予定であったが、実験を行ったところ4面全てが天井に見えてしまい不快感の惹起や宇宙酔いの原因にもなりうるなどの心理面による身体的悪影響が判明したため、照明は船内保管室が設けられている側の1面のみにし、その反対側の壁面には両端に青線を2本引き、目視で上下を判断できるようになされている[50]。
静粛性に関しては、他国のモジュールでは空調ファンや冷却水ポンプなどを原因とする騒音が酷く(防音・吸音・遮音材・サイレンサーなどの対策により現在はある程度改善している)、初期には宇宙飛行士が一時的な難聴になるほどだったのに対し、きぼうはISSの中で最も静かなモジュールで、ISSで定められている「一般の静かな事務所と同程度の水準」としている騒音基準を満たしているのは「きぼう」のみとなっている[50][120][121]。そのため他国の宇宙飛行士に人気があり、家族と交信する際などに「きぼう」がよく使われるという[122]。広くて静かなため、ISSが6人態勢になった時に2010年秋までアメリカ製の個室の寝室が設置されたこともある(現在はハーモニーに移されている)[121][123][124][125]。
船内実験室の入り口側の壁には、JAXAの旗、日の丸、きぼう組み立て時や日本人宇宙飛行士が長期滞在した時のミッションのワッペンと宇宙飛行士のサインがある[126]。入口の床には、打ち上げ前に宇宙飛行士に宛てて「Welcome to KIBO! Please enjoy and relax in this brand-new, the most spacious and quietest room in the ISS.」と書かれた青いシールが貼られている[127]。船外実験プラットフォーム上の船外実験装置を撮影する曝露部視覚装置(船外カメラ)がエアロック側側面外縁部脇に窓と同じ高さに2台設置されており、これとは別に船内にも入口側とポート側のエアロック上部[56][128]に2台の視覚装置(カメラ)が設置されている[129][130]。
また、船内実験室の外壁には日の丸と「JAPAN」の文字が入っており、多数の船外活動用手すりが外壁全周に配置されている[109]。「こうのとり」近傍通信システム(Proximity Communication System:PROX、無線通信装置)の通信アンテナは、船内実験室の進行方向側側面外壁に設置されており、レーザー反射鏡である反射器(レーザーレーダーリフレクター)は船内実験室の地心側に設置されている[131]。船内実験室をISSに設置する際に用いるロボットアームの把持部であるグラプルフィクスチャーは、進行方向側側面に電力・通信インターフェース付グラプルフィクスチャー(Power and Data Grapple Fixture:PDGF)が、その反対側側面に軌道上取り外し可能型グラプルフィクスチャー(Flight Releasable Grapple Fixture:FRGF)が、それぞれ天頂面よりに1つずつ計2か所に設けられている[132][133]。スペースシャトルの貨物室に固定するためのトラニオンピンが右舷と左舷の両側面に1つずつ計4か所、キールピンが地心側中央部分に1か所あり、いずれも船内実験室がISSに設置された後に放熱を防ぐため断熱カバーで覆われている[134]。

- 形状 - 円筒形
- 直径(外径) - 4.4m
- 直径(内径) - 4.2m
- 全長 - 11.2m
- 壁の厚さ - 約10cm(メテオロイド・デブリシールドとして、進行方向側以外の壁が外から順に、1.27mm厚の白いアルミ合金6061-T6のデブリバンパー、多層断熱材(Multi Layer Insulation:MLI)、アルミ合金2219-T87の与圧壁(アイソグリッド構造で最薄4.8mm)で構成されている「ホイップルバンパー」でできており、進行方向側150度分のみ「スタッフィング入りバンパー」(スタッフィングはバンパー側から順にMLI、アルミメッシュ、Nextel AF62(セラミック)、Kevlar 710(炭素複合材)、Kapton(ポリイミド)でできている)が設けられている。)[135][136][137]。
- 非貫通確率 - 10年間軌道上で運用した時、外壁に微小隕石やデブリによって貫通穴が生じない確率は、船内実験室と船内保管室を合わせて0.9738以上[45]。
- 質量 - 14.8t
- 搭乗員 - 通常2名、最大4名(時間制限あり)、居住設備は米国モジュールに依存[74]
- 搭載ラック - 総数23台
- システム機器用ラック - 11台
- 電力ラック(Electrical Power System:EPS) - 分電盤や分電箱が搭載されているラックで、ISSの太陽電池パドル(Solar Array Wing:SAW)で発電した電気(直流120V×2系統)を、きぼうの各機器に分配する役割を持っており、2台設置し冗長構成にしている。
- 情報管制ラック(Data Management System:DMS) - きぼうのメインコンピューター「きぼう制御装置」(JEM Control Processor:JCP)と実験装置用の中速データ伝送装置などが搭載されているラックで、2台設置し冗長構成にしており、片方が故障しても自動的に残りの1台に切り替わる。
- 空調/熱制御ラック(ECLSS/TCS Rack:Environmental Control and Life Support System(イークレス)/Thermal Control System Rack) - きぼう内の温度、湿度、気圧の調整、空気の循環・浄化、各ラックに冷却水の供給を行うラックで、ECLSS/TCS1(LTL(Low Temperature Loop))とECLSS/TCS2(MTL(Medium Temperature Loop))の2台設置し冗長構成にしている。
- ロボットアーム制御ラック - 船内実験室へ最初に設置された、きぼうロボットアーム(JEM Remote Manipulator System:JEMRMS)のロボットアーム操作卓を収めたラック。
- ワークステーションラック(Work Station Rack) - 画像データ等の切替機器、音声通信端末装置(Audio Terminal Unit:ATU)[138]、テレビモニター2台(1台のみ設置)、警告・警報パネル(Caution and Warning Panel:C&W Panel)などが収められているラック。
- 衛星間通信システムラック(ICS/PROX:Inter-orbit Communication System/Proximity Communication System) - 衛星間通信システム機器とHTV用のPROX装置を搭載したラック。
- 保管ラック(JEM Resupply Stowage Rack:JRSR) - 2台
- 実験ラック - 10台(予定)(2017年12月26日時点で、JAXA 5台、NASA 2台、冷凍・冷蔵庫ラック 2台を設置[107])
- システム機器用ラック - 11台
- きぼう船内実験室の入り口から向かって左側手前(後方:After)から
- 「JPM1A1」 - NASAの冷凍・冷蔵庫のMELFI-2
- 「JPM1A2」 - 細胞実験ラック
- 「JPM1A3」 - 流体実験ラック
- 「JPM1A4」 - 多目的実験ラック(MSPR)
- 「JPM1A5」 - 保管ラック(Zero-g StowageRack:ZSR)
- 「JPM1A6」 - きぼうロボットアーム制御ラック(JEM Remote Manipulator System:JEMRMS)
- 反対の右側手前(進行方向:Forward)から
- 「JPM1F1」 - NASAの米国実験ラック(EXPRESS(Expedite the Processing of Experiment to the Space Station) Rack 5)
- 「JPM1F2」 - 多目的実験ラック2(MSPR-2)
- 「JPM1F3」 - 勾配炉実験ラック
- 「JPM1F4」 - ワークステーションラック
- 「JPM1F5」 - NASAの米国実験ラック(EXPRESS Rack 4)
- 「JPM1F6」 - NASAの保管ラック(ZSR)
- 入り口から向かって床側手前(床:Deck)から
- 「JPM1D1」 - 空調・熱制御用のECLSS/TCS1(LTL)ラック
- 「JPM1D2」 - 電力ラック1(EPS1)
- 「JPM1D3」 - 保管空間
- 「JPM1D4」 - NASAとJAXAの冷凍・冷蔵庫のMELFI-1
- 「JPM1D5」 - 電力ラック2(EPS2)
- 「JPM1D6」 - 空調・熱制御用のECLSS/TCS2(MTL) ラック
- 反対の天井側手前(天井:Overhead)から
- 「JPM1O1」 - 情報管制ラックのDMS2、可搬式酸素マスクのPBA(Portable Breathing Apparatus)と消火器のPFE(Portable Fire Extinguisher)
- 「JPM1O2」 - システム保管ラック1(JRSR-2)
- 「JPM1O3」 - ユーザー保管ラック1(JRSR-1)
- 「JPM1O4」 - 衛星間通信システムラックのICS/PROX
- 「JPM1O5」 - 情報管制ラックのDMS1、更にその奥に可搬式酸素マスクのPBAと消火器のPFEが設置されている。
- きぼう船内実験室の入り口から向かって左側手前(後方:After)から
- 電力 - 直流120V・最大24kW
- 通信制御 - 32ビット計算機システム、高速データ伝送最大100Mbps
- 環境制御性能 - 温度:18.3-26.7度、湿度:25-70%
- 寿命 - 10年以上
- エアロック主要諸元[109]
- 外径 - 船外実験プラットフォーム側1.7m、船内実験室側1.4m
- 長さ - 2.0m
- 耐圧性能 - 約1,047hPa
- 通過可能荷物寸法 - 約0.64m×0.83m×0.80m
- 通過可能荷物重量 - 300kg
- 消費電力 - 600W以下


船内保管室 (ELM-PS)
[編集]船内保管室 (Experiment Logistics Module Pressurized Section:ELM-PS)は、軌道上で保管庫として使用される部位で、日本が打ち上げた初の有人施設となった[139]。2011年2月に多目的補給モジュール「レオナルド」を恒久型多目的モジュールに改造してISSに設置されるまで、ISSの実験モジュールの中で唯一の専用保管室であった[107]。実験室同様に1気圧が保たれ、8台のラックを搭載できる[139]。打ち上げ時に搭載していたラックは船内実験室打ち上げ後に移設され、その後は保管空間として実験機器、実験試料、ISSの各部品などの保管[140]に使われている[139]。
天頂面の一部が斜めに切られたような形状になっているが、ここには船外実験プラットフォームと同じ実験装置交換などに使う船内保管室装置交換機構(EFU)が1基設置されている[114][141]。これはHTV到着時に、後述の船外パレットをここに仮置きして、HTVの曝露パレットを取り付ける場所を空けるために使用する計画であったが、その後船外パレットは地上に回収することになったため、このような使い方は必要なくなった[141]。その後、2018年7月13日にHREP(後述のアメリカの船外実験装置)をドラゴン宇宙船15号機に回収するにあたって、一時的に船内保管室の装置交換機構(EFU)に移されており、カナダアーム2との受け渡し場所として使われるなどしている[142]。また、この天頂面には「こうのとり」近傍通信システム(PROX)のGPSアンテナ2基が設置されている[131]。
当初の計画では、船内保管室はスペースシャトルを使って物資の運搬と回収を行う輸送用コンテナとして用いる予定であったが、スペースシャトルの退役により取りやめになり、代わりに輸送についてはHTVがその役割を担うことになった[112]。地上へは持ち帰らない方針になったため、スペースシャトルへの積み込みに必要な部品の一部(EFUの下部、進行方向の反対側側面にあった把持部である軌道上取り外し可能型グラプルフィクスチャー(Flight Releasable Grapple Fixture:FRGF)[133][143]など)は船内保管室から取り外された。
静粛性も優れており、きぼう船内実験室も静かだが、実験装置のない船内保管室は特に静かだという[120]。壁には船内実験室と同様に打ち上げ前に宇宙飛行士に宛てて「Welcome to the highest place of Japan over Mt.Fuji」(日本の富士山より高い場所にようこそ)と書かれた青いシールが貼られている[127][144]。
- 形状 - 円筒形
- 直径(外径) - 4.4m
- 直径(内径) - 4.2m
- 全長 - 4.2m
- 壁の厚さ - 約10cm(メテオロイド・デブリシールドとして、進行方向側以外の壁が外から順に、1.27mm厚の白いアルミ合金6061-T6のデブリバンパー、多層断熱材(Multi Layer Insulation:MLI)、アルミ合金2219-T87の与圧壁(アイソグリッド構造で最薄4.8mm)で構成されている「ホイップルバンパー」でできており、進行方向側223度分のみ「スタッフィング入りバンパー」(スタッフィングはバンパー側から順にMLI、アルミメッシュ、Nextel AF62(セラミック)、Kevlar 710(炭素複合材)、Kapton(ポリイミド)でできている)が設けられている。)[135][136][137]
- 非貫通確率 - 10年間軌道上で運用した時、外壁に微小隕石やデブリによって貫通穴が生じない確率は、船内実験室と船内保管室を合わせて0.9738以上[45]。
- 乾燥重量 - 4.2t(打ち上げ時8.4t)
- 搭載ラック - 8台
- 電力 - 直流120V・最大3kW
- 環境制御性能 - 温度:18.3-29.4度、湿度:25-70%
- 寿命 - 10年以上


船外実験プラットフォーム (EF)
[編集]船外実験プラットフォーム (Exposed Facility:EF)は、微小重力・高真空の宇宙曝露環境を利用して、科学観測、天体観測、地球観測、通信、理工学実験、材料曝露実験などを行う多目的実験空間を提供する装置[146]。船外実験装置や衛星間通信装置を取り付けるための能動的な結合部である船外実験プラットフォーム側装置交換機構(Exposed Facility Unit:EFU)[147]が設けられており、これに実験装置側にある受動的なペイロード側装置交換機構(Payload Interface Unit:PIU)[148]が接続を行い、両者を含む一連の仕組みを船外実験プラットフォーム装置交換機構(Equipment Exchange Unit:EEU)と呼ばれている[149]。船外実験プラットフォーム側装置交換機構(EFU)は船内実験室から見て右端側面にEFU#1・EFU#3・EFU#5・EFU#7の4か所、左端側面にEFU#2・EFU#4・EFU#6・EFU#8の4か所、前端側面にEFU#9・EFU#10の2か所、上面前端付近にEFU#11・EFU#12の2か所の計12か所あり[148]、この結合部に各実験装置を取り付けることで様々な実験が行える[146]。実験装置は、基本的に標準ペイロードと呼ばれるJEM曝露部搭載型共通バス機器部(APBUS)に搭載された上で各EFUに設置され、APBUSの大きさは0.8m×1.0m×1.85mで、最大で重さ500kgまで搭載可能となっている[21][150]。EFU#2とEFU#9は2.5トンまでの実験装置を設置可能なため、より大きな寸法の実験装置が容認される可能性はある[150]。
曝露実験装置の設置場所は米、露、欧州も有しているが、電力・通信(MIL-1553Bによる低速系のバスライン)のみの供給に留まり、これらに加えて中速系のイーサネットと光ファイバーによる高速系の光通信や能動的な熱制御能力(排熱・冷却)まで提供可能なのは「きぼう」の船外実験プラットフォームだけである[150][151]。受動的な船外実験プラットフォーム結合機構(Exposed Facility Berthing Mechanism:EFBM)が設置されており、きぼう船内実験室側の能動的なEFBMと結合している[106][152]。ロボットアームが掴む把持部であるグラプルフィクスチャー(Grapple Fixture)は上面中央両端に1つずつ計2か所あり、子アーム保管装置は上面手前右にある[153][154][155]。
船外実験プラットフォームの構造は、内部は「Spar」と呼ばれる格子状のアルミ合金製フレームに「Bulkhead」と呼ばれる板状のアルミ合金製フレームが組み合わさってできており、それらのフレームの周囲を上面が「Upper Panel」、下面が「Lower Panel」、手前側面が「Forward Panel」、前方側面が「Aft Panel」、両端側面が「Side Panel」のアルミ合金製パネルで覆われ、その四隅と下面前端の計5か所に、スペースシャトルの貨物室に固定するための「トラニオン(Trunnion)」または「STS取付構造(STS(Space Transportation System) mounting structure)」[注釈 9]と呼ばれる、棒状の「Support Leg Assembly-Keel」とキール結合部の「Scuff Palate」で構成された3点支持架があり、その内前方両端2か所のトラニオンには照明、雲台、カメラで構成された曝露部視覚装置Visual Equipment:VE)が搭載されている[130][153][154][156][157]。
船外実験プラットフォームの内部機器は、円滑な運用が行えるよう故障時に交換ができる軌道上交換ユニット(Orbital Replacement Unit:ORU)化されており、ORUは上面に8個設けられているロボットアームで交換が行えるロボティクス対応軌道上交換ユニット(Robot essential ORU:R-ORU)と、下面に4個設けられている宇宙飛行士が船外活動で交換を行う船外活動対応軌道上交換ユニット(Extravehicular activity ORU:E-ORU)の2種類ある[153][154]。
R-ORU化されているのは、曝露部電力分配箱(Exposed Facility-Power Distribution Box:EF-PDB)、サバイバル電力分配箱(Survival Power Distribution Box:SPB)、曝露部制御装置(Exposed Facility System Controller:ESC)、ビデオスイッチャー(Video Switcher:VSW)、ポンプパッケージ(Fluid Pump Package:FPP)の5種類で、E-ORU化されているのは、熱制御系インターフェースユニット( TCS( Thermal Control System) Interface Unit:TIU)、ヒーター制御装置-a(Heater Control Equipment-a:HCE-a)、ヒーター制御装置-b(Heater Control Equipment-b:HCE-b)、船外実験プラットフォーム装置交換機構(EEU)ドライバーユニット(EEU Driver Unit:EDU-a/b)の4種類となっている[153][156]。
- 各EFUの接続機器の内訳(実験に使えるのはEFU#7、EFU#10、EFU#12を除く残りの9か所で、実験装置の重量はEFU#2、EFU#9が2.5トン以内で他の所は500kg以内となっている)[21][158][159]
- EFU#1に全天X線監視装置(MAXI)
- EFU#2(大型重量用2.5トン以下)にアイスクリーム(ISS-CREAM)[160]
- EFU#3は未設置[142](以前は超伝導サブミリ波リム放射サウンダ(SMILES)が設置されていて[161]、その後キャッツ(CATS)が設置されていた[162]。)
- EFU#4にナノラックス船外プラットフォーム(NREP)[163]
- EFU#5に中型曝露実験アダプター(i-SEEP)[164]
- EFU#6にジェダイ(Global Ecosystem Dynamics Investigation:GEDI、アメリカの地球観測用レーザー[165][166]。以前は沿岸海域用ハイパースペクトル画像装置および大気圏/電離圏リモート探知システム実験装置(HREP)[167]が設置されていたが、2018年7月に撤去されている[142]。)
- EFU#7に衛星間通信システム曝露系サブシステム(ICS-EF)[168](EFU#7の不具合時はEFU#5を優先使用)
- EFU#8にキャッツ(CATS[162]、以前はポート共有実験装置(MCE)が設置されていた[161][169]。)
- EFU#9(大型用2.5トン以下)に高エネルギー電子・ガンマ線観測装置(CALET)
- EFU#10にエコストレス(ECOSTRESS[170]、本来はHTVの曝露パレットが設置される場所で普段は空いているが、エコストレスが設置された2018年7月の時点で、9号機までとなっている打ち上げ予定のHTV7-9号機の曝露パレットはISS用新型リチウムイオンバッテリーを搭載するため[171]、実験機器設置のためEFU#10を使う予定はない。かつては船外パレットの使用箇所でもあったが後述の通り1回のみの使用で終わった。EFU#10の不具合時はEFU#9を優先使用。)
- EFU#11は未設置(以前は宇宙環境計測ミッション装置 (SEDA-AP)がEFU#9からここに移設されていたが2018年12月21日に廃棄されている[172]。)
- EFU#12は実験装置交換時の仮置場(普段は使用不可)
- 形状 - 箱形
- 幅 - 5.0m
- 長さ - 5.2m(EFBMと前端EFUまでの長さ、トラニオン上の曝露部視覚装置を含めると5.6m)[154]
- 高さ - 3.8m(曝露部視覚装置を含めると4.0m)[154]
- 質量 - 4.1t
- 実験装置取付け場所 - 12箇所
- システム機器用 - 2箇所
- 実験装置設置用 - 9箇所
- 実験装置仮置き用 - 1箇所
- 電力 - 直流120V・最大11kW
- システム機器用 - 最大1kW
- 実験装置用 - 最大10kW
- 個別の実験装置 - 最大3kW
- 通信制御 - 16ビット計算機システム、データ伝送速度:最大100Mbps
- 環境制御性能 - なし
- 寿命 - 10年以上


船外パレット (ELM-ES)
[編集]船外パレット (Experiment Logistics Module Exposed Section:ELM-ES)は、船外実験プラットフォームに取り付ける船外機器を船外実験装置取付け機構(Payload Attach Mechanism:PAM)に3基取り付けて、スペースシャトルで輸送するためのパレット[175]。装置交換機構(PIU)により、船外実験プラットフォーム側の EFU#10に一時的に設置される[148]。船外パレットの構造は格子状のパネルとフレームが組み合わさってできており、最大500kgの船外実験機器を3個搭載できる[176]。トラニオンは両側面に2か所ずつと先が細くなってる前端部分に1か所の計5か所にある[177]。保温のため船外パレット全体が多層断熱材(MLI)で覆われている[176]。
船内保管室と同様に、シャトルによる複数回の打ち上げを想定して設計され、機器の地上への回収も可能なように設計されたが[175]、開発期間中は具体的な回収計画は決まっていなかった[178]。しかし、船外パレットをISSに設置したままだとISSのロボティクス運用の制約となることから、船外パレットを輸送したスペースシャトルで即時回収されることが決まった[178]。回収するにあたって、再搭載時に宇宙飛行士がカメラでスペースシャトルとの相対位置の確認に使うキールカメラターゲットを、装置交換機構(PIU)のある側とは反対側の先端部分にNASAの要請で追加で設置している[178]。その後、2J/Aミッションで初めて打ち上げられたが、スペースシャトルが退役したため再使用されることはなかった[178]。船外パレットの役割はHTVの曝露パレット(Exposed Pallet:EP)が担うこととなり、船外パレットの開発・運用で得られた技術は曝露パレットの開発・運用に活かされている[178]。船外パレットが再使用されなくなったため、搭載する実験機器に設けられる、船外パレットに取り付けるための4本のペイロードトラニオン(Payload Attach Mechanism-Payload Unit:PAM-PU)は、HTVでの輸送時には打上げ保持機構(HTV Cargo Attachment Mechanism – Passive:HCAM-P)に変更される[150]。
2J/Aミッションでは、船外実験装置2基 (MAXI、SEDA-AP) と衛星間通信システム (ICS-EF) を搭載し運搬した[92]。これらの搭載機器はきぼうロボットアームを使用して船外実験プラットフォームに移設され、船外パレットは空のままスペースシャトルのペイロードベイに戻されて、地球へ回収された[92][179]。
- 主要諸元[180]
- 形状 - フレーム型
- 幅 - 4.9m
- 長さ - 4.1m
- 高さ - 2.2m(実験装置を含む)
- 質量 - 1.2t(実験装置を含まない)
- 実験装置取付け場所 - 3箇所
- 実験装置2個+R-ORU 3個またはE-ORU 2個
- 電力 - 直流120V・最大1kW
- 熱制御方式 - ヒーター、断熱材
- 環境制御性能 - なし
- 寿命 - 10年以上


ロボットアーム (JEM-RMS)
[編集]きぼうロボットアーム (JEM-Remote Manipulator System:JEM-RMS)は、実験や船体の保全作業支援に使用するロボットアームである[181]。全長10mの親アームと、親アームの先端に取り付けて使用する2.2mの子アームの2つと船内のロボットアーム操作卓(RMSラック)からなる[181]。アームはそれぞれ6つの関節を持ち、人間の腕と同じような動作が可能である[181][182]。
親アームは船内実験室のエアロックの左上にあるロボットアーム取付け台に設置されており[106][183]、親アームブーム(船内実験室側から順に1から3まである)、関節、把持手であるエンドエフェクター(End Effector)、テレビカメラ・雲台・照明(視覚装置)で構成され、親アームブーム2(肘部)と3(手首部)にテレビカメラ・雲台・照明(各々肘部視覚装置、手首部視覚装置)があり[129][130]、カメラ超しに映像を見ながら船外実験装置の交換作業を中心に使われる[182]。子アームは、子アームエレクトロニクス、子アームブーム、関節、把持手であるエンドエフェクター(ツールと呼称)、テレビカメラで構成されている[182]。親アームのエンドエフェクターで子アームを把持した上で、船外実験プラットフォームにある軌道上交換ユニット(ORU)の交換など、精度の高い作業で使われるため、アーム先端が対象物に合わせて自動でアームの姿勢制御を行うコンプライアンス機能が搭載されている[181][182]。子アームを使わない時は、船外実験プラットフォーム上面の手前右に設けられている「子アーム保管装置(Small fine arm Stowage Equipment:SSE)」[155]に収められており、親アームも使わない時は、親アームブーム1を垂直に立てた上で親アームブーム2を斜め下に折り曲げた山折りの状態の保存姿勢で待機している[183]。親アームは、電力・通信インターフェース付グラプルフィクスチャー(Power and Data Grapple Fixture:PDGF)と、軌道上取り外し可能型グラプルフィクスチャー(Flight Releasable Grapple Fixture:FRGF)の両方に対応している[133]。
子アームはHTV初号機の与圧部に搭載して打ち上げられ、きぼう内で組み立てられた後、きぼうのエアロックを使って船外実験プラットフォームへ搬出され、子アーム保管装置に収納された[95][181]。子アームが扱えるものは、きぼう標準のツールフィクスチャーが取り付けられているものに限られ、ツールフィクスチャーには把持及びトルク供給機能があるI型と、把持及び電力供給、信号授受機能があるII型の2種類ある[184]。
JEM-RMSは地上からも遠隔操作で動かすことができる[185]。2012年のHTV3号機からこの地上からの遠隔操作を本格使用する予定であり、そのための試験が2011年12月6日に行われた[186]。以後、ロボットアームの操作は主に地上からの遠隔で行われており、その分宇宙飛行士の活動時間を他の作業に割り当てることができるようになっている[187][188]。
なお、きぼうロボットアームの開発にあたって、1997年8月に打ち上げられたスペースシャトルのSTS-85で行われたマニピュレーター飛行実証試験(Manipulator Flight Demonstration:MFD)[189]のロボットアームや、1997年に打ち上げられたきく7号に搭載されたロボットアームで培われた技術と運用経験が設計に生かされており[190]、日本で3番目となる宇宙用遠隔操作型ロボットアームシステムであり、かつ日本初の実用宇宙ロボットである[80][182]。
- 親アーム
- 型式 - 親子式6自由度アーム
- 自由度 - 6
- 長さ - 10m
- 質量 - 780kg
- 取扱量 - 最大7,000kg
- 位置決め精度 - 並進±50mm、回転±1度
- 先端速度 - 60mm/s(対象物:600kg以下)、30mm/s(対象物:3,000kg以下)、20mm/s(対象物:7,000kg以下)
- 最大先端力 - 30N以上
- 寿命 - 10年以上
- 子アーム
- 型式 - 親子式6自由度アーム
- 自由度 - 6
- 長さ - 2.2m
- 質量 - 190kg
- 取扱量 - 最大300kg
- 位置決め精度 - 並進±10mm、回転±1度
- 先端速度 - 50mm/s(対象物:80kg以下)、25mm/s(対象物:300kg以下)
- 最大先端力 - 30N以上
- 寿命 - 10年以上

衛星間通信システム (ICS)
[編集]衛星間通信システム(Inter-orbit Communication System:ICS)は、データ中継衛星こだま(DRTS)を介して筑波宇宙センターとデータ・画像・音声などの双方向通信を行う日本独自の通信システムである[192]。船内実験室の与圧系サブシステム(ICS Pressurized Module subsystem:ICS-PM)でデータ処理を行い、2J/Aミッションで船外実験プラットフォームに設置された直径約80cmのアンテナを持つ曝露系サブシステム(ICS Exposed Facility subsystem:ICS-EF、船外実験プラットフォームのEFU#7に設置された[168])で中継衛星・地上とを繋ぐ[192]。 ICS-EFの送受信用アンテナは自らの姿勢が変動してもこだまを自動追尾できるようになっている[193]。ICSとこだまを利用して、こだまが2017年8月5日に退役するまでの間[107][192]、きぼうで行われた実験データのダウンリンクに使われていた[194][195]。また、2014年6月にNASAからこだまをTDRSの予備回線として使いたいと打診があり予備として用いられたが、TDRSが健全であったため実際に予備回線として使われることはなかった[194]。通信速度は、地上へのダウンリンクが50Mbps、地上からのアップリンクが3Mbpsとなっており[192]、きぼうから地上へのハイビジョン映像の送信にも使われている[94]。
- 大きさ - ICS-PM・2.0m×1.0m×0.9m、ICS-EF・アンテナ収納時1.1m×0.8m×2.0m、ICS-EF・アンテナ展開時2.2m×0.8m×2.0m
- 重さ - ICS-PM・330kg、ICS-EF・310kg
- 通信速度・周波数・変調方式 - ICSから地上・50Mbps・約26GHz・QPSK(Quadrature Phase Shift Keying:四位相偏移変調)、地上からICS・3Mbps・約23GHz・BPSK(Binary Phase Shift Keying:二位相偏移変調)
- DRTS可視時間(理論値) - 1日あたり計約7.8時間(DRTSが1機の場合)、1回あたり最大約40分
.jpg)



実験装置
[編集]きぼうの置かれている宇宙環境は過酷で、10-6~10-4Gの微小重力で、様々な宇宙放射線が飛び交い、10-5Paの高真空で僅かにある周囲の大気組成は85%が原子状酸素となっており、太陽エネルギーは1.4kw/m2に上る[197]。ISS計画はこうした特殊な環境を利用して、宇宙での実験・研究・観測などを行うのが目的であり、きぼうは実験施設として様々な船内・船外実験装置を運用している[1]。スペースシャトルの打上げ能力の制限のため[47]、打ち上げ時には実験ラックは2台しか装置を搭載しておらず[99][100]、残りはアメリカの実験装置できぼうに移設されている[198]。また、2011年以降に順次HTVで残りの実験ラックを輸送している[20][21][199]。きぼうで最初に行われた実験は、2008年8月22日午前6時53分から始まった流体実験ラックで行われたマランゴニ対流実験である[25][200][201]。





船内実験室実験装置
[編集]きぼう船内実験室には実験ラックの設置する場所が10か所あり、その内米国、欧州と共通の国際標準実験ラック (ISPR) をJAXAが5基、NASAが5基設置する[20]。NASAは一部の実験装置をきぼうに移設している[198]。2009年夏のSTS-128でISPRと同じ大きさのISS長期滞在員用の個室1台を「きぼう」内に運んで仮設置した[202](野口聡一宇宙飛行士が利用)が、2010年9月にこの個室はハーモニーへ移設されている[125]。
JAXAが設置しているラックは以下の通り。
流体実験ラック (RYUTAI)
[編集]流体実験ラック(Ryutai Experiment Rack:RYUTAI)は、1J/Aミッションで船内保管室に搭載して打ち上げられ、1Jミッションで船内実験室に移設された[99]。マランゴニ対流の観察や結晶成長実験などを行う装置を搭載し、結晶生成の仕組みの解明や結晶成長制御技術の開発を行うための実験を行う[99]。
- 流体物理実験装置 (Fluid Physics Experiment Facility:FPEF) - 沸騰、熱伝達、濡れ性、燃焼、泡挙動、マランゴニ対流などの流体の動きを、地球の重力の影響を排して微小重力環境下で実験・観察を行う[203]。
- 溶液結晶化観察装置 (Solution Crystallization Observation Facility:SCOF) - 自然対流の発生しない宇宙空間で、結晶の形・組織・温度・濃度・生成成長過程の様子を観察する[204]。
- 蛋白質結晶生成装置 (Protein Crystallization Research Facility:PCRF) - セルカートリッジが6つあり、それぞれ個別に蛋白質の個性に合った温度、濃度、圧力などの条件を細かく設定ができる[205]。
- 画像取得処理装置 (Image Processing Unit:IPU) - 地上へ送信できなかった実験画像データを、同時にモニター・録画(データ保存用ハードディスク120Gバイトを最大6台搭載可能)し圧縮(MPEG2方式、6チャンネル同時)処理を行い、伝送ラインを用いて地上に送る機能を持つ[206]。
細胞実験ラック (SAIBO)
[編集]細胞実験ラック(Saibo Experiment Rack:Saibo)は、1J/Aミッションで船内保管室に搭載して打ち上げられ、1Jミッションで船内実験室に移設された[99]。植物や細胞などを培養する装置を搭載し、宇宙環境が生物にどのような影響を与えるのかを解明するための実験を行う[99]。
- 細胞培養装置 (Cell Biology Experiment Facility:CBEF) - 微小重力培養室と回転テーブルによる最大2Gまでの人工重力を起こせる培養室の2つの培養室を持っている[207]。
- クリーンベンチ (Clean Bench:CB) - 生物実験で実験試料がカビやほこりに汚染されないよう、微小粒子が100から1,000個の環境を作り出す装置[208]。2018年8月2日現在、運用を行っていない[20]。
勾配炉ラック (KOBAIRO)
[編集]勾配炉ラック(KOBAIRO Rack:KOBAIRO)は、2011年1月にHTV2号機で運搬されて設置された[199]。
- 温度勾配炉(Gradient Heating Furnace:GHF) - 試料を最高摂氏1,600度まで加熱して融解、冷却、結晶化して半導体の性質を研究する材料実験ラック。最大15個の試料をあらかじめ搭乗員が装着しておくことにより、地上からの遠隔操作で試料の交換や実験操作が可能である。炉体部 (GHF-Material Processing Unit:GHF-MP)、試料自動交換機構 (Sample Cartridge Automatic Exchange Mechanism:SCAM)、制御装置 (GHF-Control Equipment:GHF-CE)の3つで構成されている[209]。
多目的実験ラック (MSPR)
[編集]多目的実験ラック (Multi-purpose Small Payload Rack:MSPR)は、2011年1月にHTV2号機で運搬されて設置された[199]。大型実験装置用のワークボリューム(WV)、小型実験装置用の小規模実験エリア(SEA)、作業台のワークベンチ(WB)からなっており、電力・通信・ガスといった各リソースを提供し、以下の実験装置を入れ替えることにより様々な実験が行える[210]。
- 燃焼実験チャンバー (Chamber for Combustion Experiment:CCE)(HTV2で運搬) - 多目的実験ラックのワークボリューム内に設置されている燃焼実験を行うための装置[211]。
- 水棲生物実験装置 (Aquatic Habitat:AQH)(HTV3で運搬) - モデル生物であるメダカとゼブラフィッシュを90日間かけて3世代の継代飼育を行う装置[212]。2018年8月2日現在、運用を行っていない[20]。
- 液滴群燃焼実験供試体(Group Combustion Experiment Module:GCEM)(HTV5で運搬) - 熱による自然対流が起きない微小重力下で燃料液滴群(燃料を微小粒子化したものの群体)の燃焼の仕組みを観察する装置[213][214]。
- 沸騰・二相流体ループを用いた気液界面形成と熱伝達特性(Interfacial Behaviors and Heat Transfer Characteristics in Boiling Two-Phase Flow:TPF)(HTV6で運搬) - 無重力化で液体の熱の伝わりやすさを調べ、得られたデータを人工衛星、探査機、宇宙基地などの排熱システムの設計に応用させるためのデータベース構築を行う実験[215]。
- 微粒化観察装置(Atomization Observation Equipment:AOE) - 無重力環境下で液糸が分かれていく過程をハイスピードカメラで撮る装置。この実験により明らかにされた新しい微粒化概念を噴霧燃焼シミュレーターに反映させ、新型エンジン開発に応用する[216]。
- 次世代水再生実証システム(JEM Water Recovery System: JWRS)(開発中) - 現在ISSで使われている水再生システムより、小型で消費電力が少なく再生効率の高い、保守整備が容易な次世代型水再生システムを開発するにあたって、小型の実証システムを先に開発し、きぼうで実証実験を行う予定[217]。
多目的実験ラック2 (MSPR-2)
[編集]多目的実験ラック2 (Multi-purpose Small Payload Rack 2:MSPR-2)は、2015年8月にHTV5号機で運搬されて設置された[218]。
- 静電浮遊炉 (Electrostatic Levitation Furnace:ELF)(HTV5で運搬[218]) - 地上では容器から不純物が入るため、微小重力下で静電気を使ってガラスなどの材料を浮かせ、複数のレーザーを照射して溶かしたり固めたりすることができる装置[219]。
冷凍・冷蔵庫 (MELFI)
[編集]冷凍・冷蔵庫(Minus Eighty degree Celsius Laboratory Freezer for ISS:MELFI)は、ESAが開発した[220][221]窒素ガスを冷媒にした冷凍・冷蔵庫である。スペースシャトルSTS-121、STS-128、STS-131の3回に分けて打ち上げられ[222]、アメリカはこの内2台をきぼうに移設しており、その内MELFI-1は日本が15%の利用権を持っている[223][224]。4つの冷凍室があり、-80度、-26度、+4度に温度を設定でき、常温の実験試料を3時間以内に-80度まで冷却でき、8時間停電しても設定温度を維持できる性能を持っている。実験試料を冷却したまま運べるようになっており、15回の打ち上げと10年間の運用ができるようになっている[225]。
EXPRESS Rack 4及び5
[編集]EXPRESS Rack 4(Expedite the Processing of Experiment to the Space Station Rack 4)及びEXPRESS Rack 5は、2001年8月にスペースシャトルSTS-105で打ち上げられたNASAの実験ラック[226]。EXPRESSラックは国際標準実験ラック(ISPR)の一種で、実験装置に対する電力、通信、真空排気、窒素ガス、冷却(水冷・空冷[227])、水、取付け機構などの供給機能を持っており、複数分野にわたる科学実験[228]を円滑に進める目的でマーシャル宇宙飛行センター(MSFC)とボーイング社によって開発された[226][229]。地上から遠隔操作でき、マーシャル宇宙飛行センターにある搭載物運営統合センター(Payload Operations and Integration Center:POIC)で、ペイロード開発者又はペイロードラックオフィサー(PRO)が操作を行う[226]。EXPRESS Rack 4と5は、最初デスティニーに設置され、その後きぼうに移されている[107][228]。2014年8月31日までの稼働時間はEXPRESS Rack 4が93,654時間で、EXPRESS Rack 5が845時間となっている[230]。ラップトップコンピューターには、Lenovo T61pが用いられている[231]。
- 「EXPRESS Rack 4」搭載機器(2017年時点)[232]
- DECLIC(Device for the Study of Critical Liquids & Crystallization) - 流体学に関する実験機器。
- NanoRacksプラットフォーム(NanoRacks Platforms) - 実験プラットフォームとして各種実験が行えるNanoRacksモジュールに電力・通信機能を提供し、最大で16のペイロードを搭載できる[233]
- ELITE-S2(ELaboratore Immagini TElevisive - Space 2) - 宇宙船設計に人間工学を反映させるために無重力化での脳や視覚と運動の関係を明らかにする実験機器[234]。
- Plate reader-2 - マイクロプレートリーダーを搭載した実験機器[235]。
- TangoLab-1(Payroad Card MultiLab) - カード型のペイロードを複数搭載できる実験機器[236]。
- SAMS-II-RTS2(Space Acceleration Measurement System-II Multiple Remote Triaxial Sensor) - ISSに加わる振動や加速度を調べる実験機器[237]
- 「EXPRESS Rack 5」搭載機器(2017年時点)[232]
- MERLIN5(Microgravity Experiment Research Locker Incubator 5) - 実験試料を-20度から+48.5度の間で保存できる冷凍・冷蔵庫・恒温器(インキュベーター)[238]
- SG100 Cloud Computer - より高性能でシングルイベント現象を含むより高い耐放射線性を持った低軌道放射線環境下での長期動作・技術実証を行うコンピューター[239]。
- LDST(Long Duration Sorbent Testbed) - 吸着剤の長期試験を行う実験機器[240]。
- Advanced Plant Habitat - 植物実験を行う実験機器[241]。
- SpaceDRUMS(Space Dynamically Responding Ultrasonic Matrix System) - カナダ宇宙庁とギニエ社(Guigne Space Systems)が開発した超音波浮遊炉で、2009年10月から2013年3月まで燃焼合成実験を行っていたが2015年には撤去されている[242][243][244]。
その他の機器
[編集]- 受動積算型宇宙放射線線量計(Passive Dosimeter for Lifescience Experiments in Space:PADLES) - 搭乗員や生物試料が受ける宇宙放射線と微小重力環境の影響を調べるためのもので、プラスチック飛跡検出器(CR-39)と熱蛍光線量計(TLD-MSO)の2つの検出器で構成されている生物実験用ドシメーターパッケージと自動線量解析システムのこと。縦横2.5cm、厚さ約5mm[245]。これを利用した「Area PADLES」「Bio PADLES」「Crew PADLES」の3つの宇宙放射線計測実験が行われている[245]。「Area PADLES」は、きぼう船内実験室の両端と中間の四隅に1つずつ計12か所と船内保管室床面の4つと天井に1つの計5か所、合わせて計17か所に設けて計測が行われており、2008年6月以降約半年ごとに回収と交換が行われる。「Bio PADLES」は、研究者からの依頼を受けて行う生物試料の被曝線量計測実験で、幅広い温度環境に対応している[245]。「Crew PADLES」は、宇宙飛行士個人の被曝線量計として被曝管理に使われており、ストラップが付いた携帯用のものである[246]。
- 宇宙放射線リアルタイムモニター装置(Position Sensitive Tissue Equivalent Proportional Chamber:PS-TEPC) - JAXAと高エネルギー加速度研究機構(KEK)が共同開発した、宇宙放射線の線量計測を行う装置で、きぼう船内実験室のエアロック横の壁に設置されている。従来、JAXAの受動型線量計とNASAの能動型計測器を用いて日本人宇宙飛行士の被曝線量管理を行っていたが、測定精度に難があったため、新たに開発されたこの装置でより正確な線量計測技術の技術実証を行う[247]。
- 微小重力計測装置(Microgravity Measurement Apparatus:MMA) - ISS内の微小重力環境は常に変化し、実験に影響を及ぼすため、3軸の加速度センサーを持っているこの装置で微小重力環境の測定を行う。きぼう内の実験ラックの表面に5個まで設置可能[248]。
- 「きぼう」搭載用ポータブル冷凍・冷蔵庫(FROST) - 2013年8月にHTV4号機で打ち上げられた小型の冷凍・冷蔵庫である[249]。このFROST1に続き、2017年2月にはFROST2がドラゴン宇宙船10号機(スペースX CRS-10、SpX-10)によって打ち上げられ、計2台がきぼうに設置されている[250]。既存のMELFIは既に飽和状態であり、日本が使える新たな冷凍・冷蔵庫が必要だったため、ツインバード工業の冷凍冷却ユニット「FPSC」(フリーピストン・スターリング方式冷凍機)を基にJAXAなどと共同で開発された[251]。ヘリウムガスを用い、その断熱膨張を利用して最大-70度以上まで冷却可能[251]なスターリング冷却器で、庫内の温度差を±0.5度以内に保てるようになっており[252]、国産の新保冷剤を使って停電時でも最長8時間まで[252]保冷できるようになっている[253][254]。船内実験室の左側の窓の脇に設置されている[255]。

船外実験プラットフォーム実験装置
[編集]実験装置は大きさ0.8m×1.0m×1.85mの重さ500kg以内で、直方体の形をしたJEM曝露部搭載型共通バス機器部(APBUS)と呼ばれる標準ペイロードの箱に入れられ、船外実験プラットフォームに設置される。きぼう船外実験プラットフォームには、船内実験室と同じく実験機器の設置する場所が10か所あり、各実験機器へ電力・冷却水・通信機能を供給している。10か所の内、JAXAが5基、NASAが5基の実験機器を設置する。船外実験プラットフォームに取り付けた状態で打ち上げることはできないため、船外パレットやHTVの曝露パレットに搭載して打ち上げるか「きぼう」のエアロック経由で船外に出し、ロボットアームを使用して取り付けられる[21][38]。
船外実験プラットフォーム以外の曝露実験方法もあり、きぼうロボットアームで実験装置を把持したまま実験・観測を行う「親アーム先端設置型」(2015年6月の「Free-Space PADLES実験」[257]、2018年10・11月の「ループヒートパイプラジエーター(Loop Heat Pipe Radiator:LHPR)技術実証実験」など[258])、きぼうロボットアームで小型衛星を放出する「親アーム放出型」(2012年10月から始まった小型衛星放出機構(JEM Small Satellite Orbital Deployer:J-SSOD)を用いた超小型衛星の放出事業)、きぼうエアロックの移動テーブルに実験装置を取り付けて船外に伸展した状態のまま実験・観測を行う「エアロック設置型」の3つである[259][260]。
JEM曝露部搭載型共通バス機器部(APBUS)
[編集]JEM曝露部搭載型共通バス機器部(Attached Payload BUS for Kibo Exposed Facility Payload:APBUS)は、実験機器をきぼう船外実験プラットフォームに設置する際に使われる共通バス機器部で、実験機器を入れる質量や重心を最適化したミッションインタフェース構造部(Mission Interface Structure:MSTR)と、きぼうで使われる特殊な通信方法を地上での通信方法に変換し、実験機器ときぼう間の通信を中継する通信制御部(Attached Payload Remote Terminal:APRT)と、ISS特有の120Vの電圧が1系統供給されているものを、人工衛星などで使われている28Vに変圧し、複数の系統への分配も行える電力分配器(Power Distribution box for Attached Payload:PDAP)と、太陽光の有無で実験装置の温度が下がるのを防ぐため、実験装置を一定の温度に保温するヒーター制御器(Heater Control Equipment:HCE)と伸展マストに実験機器を搭載して1m以上伸展でき、地上からの遠隔操作や宇宙飛行士が手動で伸展と収納を行うことができる伸展機構(Extension Mechanism Assembly:EMA)の5つで構成されている[261]。
宇宙環境計測ミッション装置 (SEDA-AP)
[編集]宇宙環境計測ミッション装置(Space Environment Data Acquisition equipment - Attached Payload:SEDA-AP)は、2009年の2J/Aで船外パレットに取り付けて打ち上げられ[262]、EFU#9(不具合時はEFU#11を使用)[263]に設置されている。後にEFU#11に移設されている[21]。人体や人工衛星に影響を与える各種の宇宙環境を計測する。3年間の計測を行う予定で、8種類もの機器で宇宙環境を計測するため宇宙の百葉箱と形容されている。JEM曝露部搭載型共通バス機器部(APBUS)の軌道上技術実証も目的としている。微小粒子捕獲実験装置・材料曝露実験装置 (MPAC/SEED) は2010年4月にスペースシャトル (STS-131) で回収された[264]。SEDA-AP本体はHTVで廃棄される予定だったため[265] ISSに残されたままだったが、2018年12月21日にカナダアーム2によりISSから軌道上に廃棄されており、数年後に大気圏へ再突入する予定となっている[172][266]。
- 中性子モニター (Neutron Monitor:NEM) - 中性子の計測を行う。
- 重イオン計測装置 (Heavy Ion Telescope:HIT) - 重イオン(Li-Fe)の粒子別エネルギー分布の計測を行う。
- プラズマ計測装置 (Plasma Monitor:PLAM) - 宇宙空間のプラズマの密度と電子温度の計測を行う。
- 高エネルギー軽粒子モニター (Standard Dose Monitor:SDOM) - 電子、陽子、アルファ線等の高エネルギー軽粒子の粒子別エネルギー分布の計測を行う。
- 原子状酸素モニター (Atomic Oxygen Monitor:AOM) - ISS周回軌道上の原子状酸素量の計測を行う。
- 電子部品評価装置 (Electronic Device Evaluation Equipment:EDEE) - きぼうにある電子部品の宇宙放射線によるシングルイベント現象(宇宙放射線粒子の入射で、電子部品の回路が破損したり、一時的な誤動作が起きる現象)や劣化の計測を行う。
- 微小粒子捕獲実験装置 (Micro-Particles Capturer:MPAC) - ISS周回軌道上に存在する微小粒子を捕獲し、地上へ回収した後、粒子の大きさ・組成・衝突エネルギー等を調べる。STS-131で回収済み。
- 材料曝露実験装置 (Space Environment Exposure Device:SEED) - 熱制御材料や固体潤滑剤等といった宇宙用材料を直接宇宙空間に曝す装置で、地上へ回収した後、宇宙用材料の劣化の度合いを調べる。STS-131で回収済み。
全天X線監視装置 (MAXI)
[編集]全天X線監視装置(Monitor of All-sky X-ray Image:MAXI)は、2009年の2J/Aで船外パレットに取り付けて打ち上げられ[262]、EFU#1(不具合時はEFU#5を使用)[263]に設置されている。広視野のX線観測装置を備えて、ISSの公転により90分間隔で全天のX線天体1,000個超を撮影し、X線の強度変化や突発的な天文現象の発生を発見する[267]。
超伝導サブミリ波リム放射サウンダ (SMILES)
[編集]超伝導サブミリ波リム放射サウンダ(Superconducting Submillimeter-Wave Limb-Emission Sounder:SMILES)は、2009年9月にHTV初号機で打ち上げられ[268]、船外実験プラットフォームのEFU#3(不具合時はEFU#5)[263]に設置された。成層圏の大気に含まれる微量な物質が放射するサブミリ波を計測し、オゾン層および関連する化学物質の観測を行う[269]。SMILESは2010年4月に、サブミリ波受信系の一部の機器が故障したため観測運用は出来なくなった[269][270]。2011年1月19日に復旧を断念し運用を終了したが[271]、稼働していた半年分の大気観測データは得られており、また2014年3月まで行われた、SMILESに搭載されている小型長寿命化した機械式冷凍機による極低温冷却の技術実証による温度変化の特性データも得られている[272]。その後、2015年9月にHTV5号機で回収され大気圏再突入時に廃棄されている[161]
ポート共有実験装置 (MCE)
[編集]ポート共有実験装置(Multi-mission Consolidated Equipment:MCE)は、2012年にHTV3号機で打ち上げられ[273]、船外実験プラットフォームのEFU#8に設置された[161][169]。MCEは、比較的小型の5つのミッションをひとつの実験装置に混載し、ポートを共有して実験・観測を行う実験装置である[169]。その後、2015年9月にHTV5号機で回収され大気圏再突入時に廃棄されている[161]。
- 地球超高層大気撮像観測 (Ionosphere,Mesosphere,upper Atmosphere, and Plasmasphere mapping:IMAP) - 高度80km以上で発生する光学現象の大気光とプラズマ共鳴散乱光を可視光線、近赤外線、極端紫外線の3つの波長域で観測し、カーマン・ライン近辺での擾乱の物理機構を明らかにする。
- スプライト及び雷放電の高速測光撮像センサー (Global Lightning and Sprite Measurement Mission:GLIMS) - CMOSカメラ、フォトメーター、VHF干渉計、VLF受信機などが搭載されており、これらを用いて雷放電とスプライトの観測を行う。
- 宇宙インフレータブル構造の宇宙実証 (Space Inflatable Membranes Pioneering Long-term Experiments: SIMPLE) - インフレータブル構造(気体の内圧を用いて風船状膜材を膨らませる超軽量の空気膜構造物)を、宇宙空間での長期運用で技術実証を行い、基礎データを取得する。
- EVA支援ロボットの実証実験 (Robot Experiment on JEM:REXJ) - 宇宙飛行士の支援を行う「有人宇宙活動支援ロボット(Astronaut Support Robot:Astrobot)」の技術開発の一環として、伸縮自在のロボットアームとテザーを用いた空間移動の技術実証を行う[274]。
- 船外実験プラットフォーム用民生品ハイビジョンビデオカメラシステム (Commercial off - the - shelf high Definition TV Camera - Exposed Facility:COTS HDTV-EF) - 国際宇宙ステーションに民生品ハイビジョンビデオカメラを宇宙空間に曝しての実証実験で、地球の200km×350kmの範囲の動画・画像を撮り、宇宙線によるCMOS撮像素子の損傷具合などを調べ、市販の民生品を宇宙利用できないか検証する[275]。
高エネルギー電子・ガンマ線観測装置 (CALET)
[編集]高エネルギー電子・ガンマ線観測装置 (CALorimetric Electron Telescope: CALET)は、2015年にHTV5号機で打ち上げられ[218]、EFU#9に設置された[276]。CALETはTeV領域の高エネルギー電子線・ガンマ線を観測し、高エネルギー宇宙線の起源と加速の仕組み、宇宙線の銀河内伝播の仕組み、暗黒物質の正体などの解明を目指したものである[277][278]。
- カロリメーター(CALorimeter:CAL) - 電荷測定器(CHD)、イメージングカロリメーター(IMC)、全吸収型カロリメーター(TASC)の3つの検出器で構成されており、宇宙線の入射方向や種類を調べる[279]。
- ガンマ線バーストモニター(Gamma-ray Burst Monitor:CGBM) - 硬X線観測装置(HXM)2台、軟ガンマ線観測装置(SGM)1台の3つの検出器で構成されており、CALのガンマ線観測機能を補い、ガンマ線の突発的な天体現象を観測する[279]。
- 地球観測用小型赤外カメラ(Compact Infrared Camera:CIRC) - 地上の森林火災を監視する相乗りミッション[279][280]。
中型曝露実験アダプター(i-SEEP)
[編集]中型曝露実験アダプター(IVA-replaceable Small Exposed Experiment Platform:i-SEEP)は、2016年12月にHTV6号機で打ち上げられ[281]、EFU#5に設置された[164]。寸法50cm×70cm×35cmで重さ200kgまでの実験装置を複数搭載できるプラットフォームで、曝露環境下での搭載機器の技術実証を行う[282]。
- 次世代ハイビジョンカメラ(High Definition TV Camera - Exposed Facility 2:HDTV-EF2)システム - 光学20倍ズームのハイビジョンカメラ、高感度で光学5倍の4Kカメラが搭載されており、地上から遠隔操作できる。自然災害の観測や、民生品カメラの曝露環境下での技術実証、映像の広報・教育への利活用を行う。
- 高性能小型GPSR/Wheelユニットの軌道上実証 - 小型衛星に搭載される、民生品で作られた「GPS/Wheel Demo Unit」を曝露環境下で技術実証を行う。




その他の機器
[編集]- 微小重力計測装置(Microgravity Measurement Equipment:MME) - 船内実験室の微小重力計測装置(MMA)と同様の装置で、船外実験プラットフォームに3つ設置されている[283]。
- 沿岸海域用ハイパースペクトル画像装置および大気圏/電離圏リモート探知システム実験装置(Hyperspectral Imager for the Coastal Ocean (HICO) & Remote Atmospheric & Ionospheric Detection System (RAIDS) Experimental Payload:HREP) - 2009年9月にHTV技術実証機で打ち上げられ、EFU#6に設置された[167]アメリカ海軍研究所(Naval Research Laboratory:NRL)による地球観測装置[150][284]。沿岸海域用ハイパースペクトル画像装置(HICO)は、可視光線と近赤外線によるハイパースペクトル海洋画像システムを搭載しており、沿岸の形状や特性を計測する。大気圏/電離圏リモート探知システム(RAIDS)は、可視光線と紫外線による遠隔探知装置で、電離圏や宇宙機に働く大気ドラッグの影響分析のため、大気圏の電子密度や中性密度周縁の輪郭の計測を行う。運用はアメリカのNASAペイロード運用統合センター(POIC)から行う[167]。2018年7月13日に、カナダアーム2で回収するため一時的に船内保管室外部天頂面にある装置交換機構(EFU)に移され、その後ドラゴン宇宙船15号機(スペースX CRS-15、SpX-15)に収容され廃棄されている[142][285]。
- 小型衛星放出機構(JEM Small Satellite Orbital Deployer:J-SSOD) - 2012年10月にHTV3号機で打ち上げられた。CubeSat(1Uサイズのもので、1Uは縦・横・長さが10cm角のもの)や50kg級超小型衛星(55×55×35cm)を軌道に放出する一連の仕組みのこと。「衛星搭載ケース」に格納した状態で無人宇宙補給機でISSに運び、「親アーム先端取付型実験プラットフォーム(Multi-Purpose Experiment Platform:MPEP)」に設置し、きぼうエアロックのスライドテーブルに取り付け、衛星放出口を塞いでいるローンチカバーを外して、RBFピンがある場合は取り外し、各衛星ごとにアクセスウィンドウカバーを組み付け、これをきぼうのエアロックから船外に出してロボットアームで把持し、放出地点に移動した後、ISS進路の反対方向の斜め下45度に向けてバネを使った分離機構で秒速1.1m-1.7m程度で放出する。放出された衛星はISSと同じ軌道傾斜角51.6度で、ISSとの衝突を避けるためISSより低い軌道を周る[5][286][287][288][289]。→詳細は「きぼう § 小型衛星放出事業」を参照なお、2019年1月に打ち上げられたイプシロンロケット4号機に、このJ-SSODの技術を応用して開発されたキューブサット放出装置(Epsilon Small Satellite Orbital Deployer:E-SSOD)が搭載されている[290][291]。
- ナノラックス小型衛星放出機構(NanoRacks CubeSat Deployer:NRCSD (en) ) - 日本の小型衛星放出機構(JEM Small Satellite Orbital Deployer:J-SSOD)の成功を見て、その有用性に着目したアメリカのナノラックス社が商業利用を目的に開発した大型の小型衛星放出機構で、6U分の衛星搭載ケースが8本の計48U分の衛星放出能力を持っている[292][293]。2018年5月16日現在、180機が放出されている[294]。ナノラックス社は50kg級衛星とCubeSatの両方に対応したKaber小型衛星放出機構(NanoRacks Kaber Microsat Deployer)も開発しており[295]、最大24U分の大きさで最大82kgまでの衛星に対応できる[296]。
- ナノラックス船外プラットフォーム(NanoRacks External Platform:NREP) - アメリカのナノラックス社が開発したものでEFU#4に設置されており、4つのスロットに最小1U(10cm四方)から最大58cm×57cm×26cm・35kgまでの実験試料等を入れ曝露実験を行い回収も可能となっている[163]。
- サイクロップス(Space Station Integrated Kinetic Launcher for Orbital Payload Systems:SSIKLOPS、Cyclops) - NASAが開発した小型衛星放出機構[297]。きぼうロボットアームの先端に取り付けられた子アーム(Small Fine Arm:SFA)で放出機構を把持する仕組みで、2014年11月29日に、直径56cmで重さ57kgの球体状の衛星であるSpinSatの放出に成功している[292][295][298]。
- キャッツ(Cloud-Aerosol Transport System:CATS) - 2015年1月10日にドラゴン宇宙船5号機(スペースX CRS-5、SpX-5)によって打ち上げられ、同1月22日[299]にEFU#3に設置されたアメリカの船外実験装置。大気中の塵、煙、エアロゾルやその他微粒子などの汚染の組成や分布、位置を測定するように設計されたLIDARリモートセンシング装置で、最低6か月-最長3年程度の運用が見込まれている[300][301][302]。2017年10月30日に、オンボード電源及びデータシステムに障害が発生し機能が停止している[303][304]。2018年3月27日にEFU#8に移設されている[162]。
- アイスクリーム、又はクリーム(Cosmic Ray Energetics and Mass for the International Space Station:ISS-CREAM、又はCREAM) - 2017年8月15日に、ドラゴン宇宙船12号機(スペースX CRS-12、SpX-12)によって打ち上げられ、同8月22日にEFU#2に設置されたアメリカの高エネルギー宇宙線観測装置[160]。前身のCREAMは、2004年から2016年までに7回にわたって計191日間南極上空でバルーン観測を行ったが、地上での観測では大気の影響や観測期間の短さもあり、より高エネルギーの宇宙線を観測するには宇宙空間で長期間の観測が必要であった。これによりISS用に開発されたのが本機である。1PeVまでの宇宙線を観測でき、3年以上の観測を予定している。ISSには同趣旨で開発されたAMS-02とCALETも設置されている[160][305]。
- エコストレス(ECOsystem Spaceborne Thermal Radiometer Experiment on Space Station:ECOSTRESS) - 2018年6月29日に、ドラゴン宇宙船15号機(スペースX CRS-15、SpX-15)によって打ち上げられ、同7月5日にEFU#10に設置されたアメリカの熱ラジオメーター(放射計)[306]。地球表面を熱赤外線で測定し、地球上の水量などの状態の変化が生物や炭素循環、農業などにどのような影響を与えるかを調べる[170][307][308]。
- ジェダイ(Global Ecosystem Dynamics Investigation:GEDI) - アメリカの地球観測用レーザーで、2018年12月13日にEFU#6に設置されている[165][166]。
- 簡易曝露実験装置(Exposed Experiment Handrail Attachment Mechanism:ExHAM) - 上面7個、側面13個の計20個の実験サンプル(縦・横100mm、奥行き20mm)を搭載できる、直方体の形をした曝露実験用の装置である[309]。
- 2015年5月に直方体の形をしたロボティクス対応軌道上交換ユニット(R-ORU)になっているサバイバル電力分配箱(SPB)上部のハンドレールに1号機が、次いで2015年11月に同じくR-ORUになっている船外実験プラットフォーム制御装置-a(ESC-a)上部のハンドレールに2号機と、船外実験プラットフォームの先端にあるEFU#12の両脇に設置されている[310][311]。
- 今までは搭乗員による船外活動が必要であったこの種の実験は、この装置ではロボットアームときぼうのエアロックを使って実験試料の回収が容易なため船外活動は不要である。実験を終了した試料は地上へ回収できる[312]。
計画中
[編集]以下の実験・観測装置が計画されている。打ち上げはHTVを利用する。
- 超高エネルギー宇宙線望遠鏡(Extreme Universe Space Observatory:EUSO) - 世界16か国が参加する国際プロジェクトで、当初は2017年の打ち上げを予定していたが[313]、2018年11月現在、計画は遅れている。きぼうには超高エネルギー宇宙線を観測する超広角望遠鏡が設置される予定である(JEM-EUSO)[314]。
運用
[編集]運用管制
[編集]ISSでは、「参加主体は、自己が提供する要素を運用する責任を有する。」としているIGA第10条とMOU第9条2a項により[19]、実験棟を持っている国はそれぞれ独自に自国の実験棟を管制しており、日本はきぼうの管制を受け持っている[315]。きぼうの管制は、筑波宇宙センターにある宇宙ステーション総合推進センター (Space Station Integration and Promotion Center: SSIPC) の宇宙ステーション運用棟で行われる[316]。運用管制施設はこの他に、宇宙ステーション試験棟、宇宙実験棟、宇宙飛行士養成棟、無重量環境試験棟があり、宇宙ステーション運用棟を含め計5施設で構成されている[316]。
SSIPCの宇宙ステーション運用棟では、きぼう自体の運用を行う「システム運用」を1階の運用管制室で、搭載している実験装置の運用を行う「実験運用」が1階のユーザー運用エリア(User Operations Area: UOA)で、きぼうの運用計画立案も1階で行われ、4階の運用リハーサル室で管制員の訓練や統合リハーサル、NASAとの共同統合訓練が行われる[317][318]。2008年3月11日午前10時に、きぼうの運用管制室が稼働開始しており、きぼうの運用を終えるまで24時間体制で運用が行われる[319][320]。2016年8月8日に、きぼう運用管制室が一新されている[185]。
初めてきぼうの運用管制が行われたのは、きぼう船内保管室などのISSへの運搬と設置を行ったSTS-123の国際宇宙ステーション組立てミッション(1J/A)からで[321]、きぼうはインクリメント17(2008年2月-9月)からの運用開始となった。きぼう運用管制チームは、普段はきぼうの管制を行っているが、HTV(こうのとり)がISSに係留している間は、HTVの管制も行っている[322]。
きぼうの運用システム
[編集]きぼうの運用システムの構成要素は以下の7つからなっている[317][318][323]。
- 運用管制システム(Operations Control System:OCS) - きぼうや搭載実験装置の監視・制御・運用支援、実運用計画の立案、データ管理、管制ネットワーク運用管理、地上要員の訓練などを行う。
- 運用利用計画立案システム - 電力や通信、搭乗員活動時間などのリソースをISS参加国の間で配分する運用計画を長期・詳細の2つに取りまとめる。
- 搭乗員運用訓練システム - 搭乗員のきぼう運用にかかる知識、技能、操作手順の訓練を行う。
- 運用技術支援システム - きぼうと搭載実験装置の運用性、安全性、物理的適合性の確認を行う「エレメントインテグレーションシステム」、きぼうに搭載されているソフトウェアや運用データファイルを作成、検証、管理する「フライトソフトウェア/運用データファイル(ODF:Operations Data File)生成システム」、きぼうの機器が故障した場合に、各機器の電気的・機械的な状態の模擬実験を行う「エンジニアリングシミュレーター」、無重量環境試験設備にてきぼうの実物大模型を用いた運用手順の確認を行う「きぼうの水中モックアップ」などで構成されている。
- 保全補給運用管理システム - きぼうの部品交換や消耗品の補給、修理の管理を行う。
- 運用ネットワークシステム - 筑波宇宙センターとジョンソン宇宙センターの間で、きぼうのデータの送受信を行う。
- ケネディ宇宙センター射場支援装置システム - 補給品の打ち上げ時に射場作業の支援を行う。
システム運用
[編集]SSIPC内にある運用管制室で、運用管制チームは最大10ポジションの3交代シフト(8:00-17:00、16:00-1:00、0:00-9:00[324])の24時間体制で365日監視を行っており[325]、指揮を執るフライトディレクターと運用管制員は総勢50名以上が勤めているが、常駐している運用管制官の1シフト最小構成は5人のみで、多くても15人程度と効率的な運用がなされている[317][324][326]。きぼうのシステムを監視するほか、利用計画や補給物資の選定や輸送計画、不具合発生時の修理計画などの立案も担っており、不具合対応の運用シミュレーション訓練も行い練度向上に努めている[185][317]。また、ISS全体を統括しているのはNASAのフライトディレクターであり、予定の変更が必要な場合はNASAのフライトディレクターと交渉する必要があるため、筑波の運用管制室からはNASAのジョンソン宇宙センターにあるミッションコントロールセンター(MCC-H)を映すことができ、かつ常時NASAのフライトディレクターと連絡が付くようになっている[315]。
きぼうとSSIPCの通信は、ISSの通信システムからTDRS、ジョンソン宇宙センター、ホワイトサンズ地上局(White Sands Complex:WSC)を経由したNASAリンク(Sバンド、kuバンド)[327]で24時間行われる[323]。当初は、日本のデータ中継技術衛星こだま(DRTS)とDRTS地上局を経由したJAXAリンク(Kaバンド、Sリンク)での通信も可能であったが、こだまが2017年8月5日に退役したため、現在はNASAリンクのみとなっている[107][327][328]。きぼうに搭載されている衛星間通信システムは、実験データのダウンリンク[194][195]とTDRSの予備回線(未使用に終わった)[194]として使われていた。また、NASAから実験機器の安全審査権限を委譲されており、日本は単独で「きぼう」の安全管理責任を負っている[329]。組み立てが始まった2008年以降、重大事案や緊急事態は起きていない[326]。
実験運用
[編集]実験運用計画は筑波宇宙センターでまとめた後、マーシャル宇宙飛行センターに送り調整を行い、最終的にISS全体の運用計画を統括しているジョンソン宇宙センターでISSの運用計画に組み入れられ、実験が行われる[317]。きぼうでの実験は、実験運用管制チームが搭乗員の作業を支援したり、データの監視や遠隔操作で実験機器を制御し実験を行う。他にも簡素な実験機器等を使った教育文化ミッション(Education Payload Observation: EPO)[330][331]や宇宙飛行士の健康管理に関する医学ミッションなどの運用、更に運用の進め方・規則・手順書などの作成等も実験運用管制チームが行う[332]。
実際に各実験を進めるにあたって、実験運用管制チームに加え、ユーザーとなる実験テーマ提案者の代表研究者(Principal Investigator:PI)や共同研究者(Co-Investigator:CI)、代表研究者と実験運用管制員の橋渡しを行うユーザーインテグレーター(User Integrator:UI)や実験装置開発担当(Engineer)が協力して実験を行っていく[332]。また、実験装置を搭載したユーザーは、運用管制室に隣接したユーザー運用エリアで実験の模様をモニターし、適宜実験に関する指示を実験運用管制チームへ行ったり、ISSと連絡を取り合うことができる[317][332]。
運用モード
[編集]きぼうには4つの運用モードがあり、運用状態や各作業内容に応じて変更を行う。運用モードの変更は搭乗員や地上からの指令で行えるが、ISSの7つの運用モードと適合している必要があり(例:ロボティクス運用モードに変更する場合、ISSは外部運用モードでなくてはならない)、適合していない場合は自動的に「スタンバイモード」に変更される[333]。
- きぼう運用モード[333]
- 「標準モード」 - 搭乗員が実験を行うことができロボットアームの運用は行えない。通常はこのモードを中心に運用されている。
- 「ロボティクス運用モード」 - ロボットアームの運用が行える。
- 「スタンバイモード」 - 異常時に最小限のシステムで運用する。
- 「隔離モード」 - 与圧環境に異常が生じた場合に隣のモジュールであるハーモニーとのハッチが閉じられる。このモードでは「きぼう」内に立ち入ることはできない。
- きぼう曝露部運用モード[334]
- 「曝露部保存モード」 - 最少資源で曝露部システムを保存するモード。
- 「ミッション運用モード」 - 曝露部のミッション運用を行うモード。通常はこのモードを中心に運用されている。
- 「特殊運用モード」 - 曝露部保存モード、ミッション運用モード以外のモード。

- 「標準モード」 - 船内保守、ペイロード運用などの時に運用されているモード。普段はこのモードを中心に運用されている。
- 「リブーストモード」 - ISSが軌道変更(リブースト等)を行うときのモード。
- 「微小重力モード」 - 微小重力環境で実験装置の運用を行うため、微小重力性能が適用される。
- 「サバイバルモード」 - ISSの姿勢や電力に異常が生じるなど、搭乗員に危険が及ぶ恐れがある場合などに発動される、ISSの長期間運用を行うモード。電力、通信、排熱等のペイロード運用支援は保証されない。このモードへの移行はいつでも可能となっている。
- 「接近モード」 - ソユーズ、プログレス、こうのとり等の他の宇宙機の接近や離脱時に運用支援を行う。
- 「安全確実なクルーの帰還(Assured Safe Crew Return:ASCR)モード」 - 異常時に搭乗員が危機に晒され、地上への帰還を行うにあたって、ソユーズ宇宙船の離脱を支援する。このモードへの移行はいつでも可能となっている。
- 「外部運用モード」 - 船外活動(EVA)やロボットアーム運用時等、船外での組立作業や保全作業を支援する。
| ISS 標準モード |
ISS リブーストモード |
ISS 微小重力モード |
ISS サバイバルモード |
ISS 接近モード |
ISS ASCRモード |
ISS 外部運用モード | |
|---|---|---|---|---|---|---|---|
| きぼう標準モード | ○ | ○ | ○ | × | ○ | ○ | ○ |
| きぼうロボティクス運用モード | × | × | × | × | × | × | ○ |
| きぼうスタンバイモード | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| きぼう隔離モード | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| 「きぼう」運用モードがISS運用モードに対し、○は適合、×は不適合。 | |||||||
| 曝露部運用モード | 対応するISS・きぼう運用モード | 供給可能資源 | 加速度の制限 | きぼうロボットアームによる曝露実験機器の交換 | ||
|---|---|---|---|---|---|---|
| 電力 | 通信 | 熱制御 | ||||
| 曝露部保存モード | サバイバルモード | × | × | × | - | × |
| ミッション運用モード | 標準モード | ○ | ○ | ○ | - | × |
| リブーストモード | ○ | ○ | ○ | - | × | |
| 微小重力モード | ○ | ○ | ○ | ○ | × | |
| 接近モード | ○ | ○ | ○ | - | × | |
| 外部運用モード | ○ | ○ | ○ | - | ○ | |
| 特殊運用モード | ASCRモード | ○ | ○ | ○ | - | × |
| ○は保証又は適用される、×は保証又は適用されない、-は現状未規定。 加速度の制限は、曝露実験機器への微小重力環境及び機械的擾乱の制約が適用される。 | ||||||
インクリメントマネージャー
[編集]インクリメントマネージャー(Increment Manager:IM)とは、インクリメント(ISSの運用期間単位で、搭乗員の交代を基準にした区切り。「ISS第45/46次長期滞在」の場合、「インクリメント45/46」となる[336][337]。)期間中、管制チーム・技術チーム・実験チームを含め、各インクリメントの利用計画、目標設定、運用計画の履行、危機管理、対応調整など、インクリメント担当フライトディレクターと連携し[324]、きぼうが関わるミッション全体を統括するプロデューサー役を果たす[336][337]。インクリメントマネージャー制度は2015年度(平成27年度)後半のインクリメント45/46から始まった[338]。
管制ポジション
[編集]きぼうの運用管制チームは、きぼう全体を統括する「きぼう運用管制チーム」(JAXA Flight Control Team:JFCT)と、きぼうでの実験などの利用を統括する「きぼう実験運用管制チーム」(Payload Flight Control Team:PLFCT)の2つから成っている[185]。
きぼう運用管制チーム
[編集]運用管制室での「きぼう運用管制チーム」(JAXA Flight Control Team:JFCT)の各役割と配置は以下のようになっている[185][315]。
- ExPO(Exposed Facility Payload Officer、エクスポ・エキスポ) - 最前列左右の席。曝露ペイロードオフィサー。曝露実験全体の運用を取り纏める。きぼう実験運用管制チームに属しているが、唯一運用管制室に詰めている[339]。
- CANSEI(Control and Network Systems, Electrical Power, and ICS Communication Officer、カンセイ) - 前から2列目左の席。通信・電力・管制系担当。きぼうのコンピューター、通信機器、電気・電力系機器・管制システムの状態を監視し、これらの制御を行う。
- FLAT(Fluid and Thermal Officer、フラット) - 前から2列目右の席。熱・環境・実験支援系担当。きぼう内の環境制御のため、各装置から出る熱を制御する空調機器などの状態を監視・制御を行い、実験の支援を行う。
- J-FLIGHT(JAXA Flight Director、ジェイフライト) - 前から3列目左の席。フライトディレクター。「きぼう運用管制チーム」と「きぼう実験運用管制チーム」を含め、「きぼう」の運用管制に関する全てを統括しており、きぼう運用の指揮を執る責任者。ISSと「きぼう」に関するあらゆる知識の習得とシミュレーション訓練に合格した後、実務経験を経て認定される[324]。
- J-COM(JEM Communicator、ジェイコム) - 前から3列目右の席の左側。きぼう交信担当。きぼうにいる搭乗員と交信を行う。管制員が搭乗員に指示を出す場合、必ずジェイコムを通して伝えられ、交信は英語で行われる。
- ARIES(Astronaut Related IVA and Equipment Support、アリーズ) - 前から3列目右の席の右側。船内活動支援担当。きぼう内の機器・物品などの管理や、宇宙飛行士の船内活動(Intra-Vehicular Activity:IVA)を支援する。
- KIBOTT(Kibo Robotics Team、キボット) - 前から4列目左の席。ロボティクス・構造・機構系担当。きぼうのロボットアーム、エアロック、機構系機器を遠隔操作で運用を行う。以前は搭乗員が直接ロボットアームの運用を行っていたが、現在はKIBOTTが行っている。
- Tsukuba GC(Tsukuba Ground Controller、ツクバジーシー) - 前から4列目右の席。きぼう地上システム担当。きぼうの運用管制システム、運用ネットワークシステムなどといった地上設備の運用・管理を行う。
- J-PLAN(JAXA Planner、ジェイプラン) - 実運用計画担当。かつては管制室に詰めていた[340]が現在は入らない。きぼう運用計画の立案、日勤シフトで運用計画室に入り運用計画の変更・調整を行う。
- JEM PAYLOADS(JEM Payload Officer、ジェムペイローズ) - ペイロード運用担当。かつては実験運用代表者として、唯一管制室に詰めていた[340][341]が現在は入らない。NASAの実験も含む[341]「きぼう」での実験実施者の窓口となり、実験運用が円滑に行われるよう支援する。かつて、実験運用管制チーム(Payload Flight Control Team:PL FCT)が「JEM PAYLOADS」の下に属していたこともあった[340]。
- JET(JEM Engineering Team、ジェット) - 技術支援チーム、システム運用技術支援担当。管制室には入らず、バックルームに詰めている。主にきぼう開発メンバーで組織され、きぼう運用管制チームを技術面で支援を行い、きぼうのデータ評価や機能拡張機器の開発検討なども行う。
- JAXA EVA(JAXA Extravehicular Activity、ジャクサイーブイエー) - 技術支援チーム、船外活動支援担当。管制室には入らない。日本人宇宙飛行士の船外活動(Extra-Vehicular Activity:EVA)、きぼうに関係する船外活動を技術面で支援を行う。
- OMT(Operations Management Team、オーエムティー) - 運用管理チーム、国際間調整担当。管制室には入らない。きぼうの運用にあたって、国際間での情報収集・連絡・調整を筑波宇宙センターとジョンソン宇宙センターで行う。
かつて存在したポジション
- SENIN(System Element Investigation and Integration Officer、センニン) - システム担当。きぼうのシステムを監視し、複数の管制ポジションにわたる作業をまとめる[340]。

実験運用管制チーム
[編集]ユーザ運用エリア(UOA)での「実験運用管制チーム」(Payload Flight Control Team:PL FCT)は、きぼう船内の実験装置を担当する与圧実験運用管制チームと、船外実験プラットフォームの実験装置を担当する曝露実験運用管制チームの2つに分かれており、各役割と配置は以下のようになっている[332]。
- 与圧実験運用管制チーム - J-FLIGHTが統括し、各実験ラックごとの責任者であるラックオフィサー(Rack Officer:RO)と、各実験ラックへのコマンド送信や監視などの運用を行うオペレータ(operator:OP)で構成されており、2017年1月現在、実験運用管制員約40名が在籍している[332]。
- BIO(BIology Ops Lead、バイオ) - 細胞実験ラック担当。細胞培養装置(Cell Biology Experiment Facility:CBEF)とクリーンベンチ(Clean Bench:CB)の、2つの機器が搭載されている。
- FISICS(FluId ScIence and Crystalization Science Ops Lead、フィジィクス・フィジックス) - 流体実験ラック担当。流体物理実験装置(Fluid Physics Experiment Facility:FPEF)と、溶液結晶化観察装置(Solution Crystallization Observation Facility:SCOF)と、蛋白質結晶生成装置(Protein Crystallization Research Facility:PCRF)と、画像取得処理装置(Image Processing Unit:IPU)の、4つの機器が搭載されている。
- MEISTER(MSPR Engineering and Integration Staff for Enterprising Research、マイスター) - 多目的実験ラック、多目的実験ラック2担当。水棲生物実験装置(Aquatic Habitat:AQH)、液滴群燃焼実験供試体(Group Combustion Experiment Module:GCEM)、静電浮遊炉(Electrostatic Levitation Furnace:ELF)、沸騰・二相流実験供試体(Two-Phase Flow:TPF) などの機器が搭載されている。
- GOLEM(GHF Ops Lead and Engineer of Material Science、ゴーレム) - 勾配炉実験ラック担当。温度勾配炉(Gradient Heating Furnace:GHF)が搭載されている。
- GNOME(General Non-rack Operation for Medical and Education、ノーム) - ラックに搭載されていない実験装置、教育文化ミッション(Education Payload Observation:EPO)、医学ミッションなどを担当。これらの実験やミッションを行う宇宙飛行士の作業の支援を行う。
- 曝露実験運用管制チーム - J-FLIGHTが統括し、全体の指揮を執る曝露ペイロードオフィサー(ExPO)の元、各曝露実験のコマンド送信や監視などの運用を行うオペレーター(operator:OP)で構成されており、2017年1月現在、実験運用管制員約15名が在籍している[332]。
- SEDA-AP OP - 宇宙環境計測ミッション装置(Space Environment Data Acquisition equipment - Attached Payload:SEDA-AP)を担当。
- MAXI OP - 全天X線監視装置(Monitor of All-sky X-ray Image:MAXI)を担当。
- CALET OP - 高エネルギー電子・ガンマ線観測装置(CALorimetric Electron Telescope:CALET)を担当。
- i-SEEP OP - 中型曝露実験アダプター(IVA-replaceable Small Exposed Experiment Platform:i-SEEP)を担当。
- SMILES OP - 超伝導サブミリ波リム放射サウンダ(Superconducting Submillimeter-Wave Limb-Emission Sounder:SMILES)を担当。運用を終了している。
- MCE OP - ポート共有実験装置(Multi-mission Consolidated Equipment:MCE)を担当。運用を終了している。
かつて存在したポジション
- JPOC(JAXA Payload Operations Conductor、ジェイポック) - 運用管制室のJEM PAYLOADSを補佐し、日本の実験運用全てを取りまとめる、実験運用管制室の指揮官[340]。
- RYUTAI Rack UI/PI/Eng.(User Integrator/Principal Investigator/Engineer (RYUTAI Rack)、リュータイ ユーザインテ/ピーアイ/エンジニア、流体実験ラック実験研究者チーム、エンジニアチーム) - 実験テーマ提案者かつ代表研究者のPI、各実験機器・サンプルの製作や実験計画の立案に関わるUI、実験装置の開発を担ったEngineerから構成される、流体実験ラックの実験遂行チーム[340]。
- SAIBO Rack UI/PI/Eng.(User Integrator/Principal Investigator/Engineer (SAIBO Rack)、サイボウ ユーザインテ/ピーアイ/エンジニア、細胞実験ラック実験研究者チーム、エンジニアチーム) - RYUTAI Rack UI/PI/Eng.と同様、細胞実験ラックの実験遂行チーム[340]。
- EPO/Medical(Education Payload Observation Officer、イーピーオー/メディカル) - 教育文化・医学ミッション担当。各ミッションの機器製作、計画の立案を提案者と共に行ってきた教育文化・医学ミッションの各担当者が、EPOやMedicalとして実験運用管制室に詰める[340]。
「きぼう」に関連する計画
[編集]宇宙ステーション補給機(HTV、こうのとり)とH-IIBロケット
[編集]
日本は米国のスペースシャトルやロシアのソユーズなどに頼らず、地球からISSへ物資を輸送する独自の宇宙輸送システムを開発することを決定し、1995年(平成7年)に概念設計に着手し、1997年(平成9年)から開発が始まった[342]。これは宇宙ステーション補給機(H-II Transfer Vehicle:HTV、愛称こうのとり)と呼ばれる機体で、全長約10メートル、直径約4.4メートルの円筒形で、推進モジュール・電気モジュール・キャリアの3区画からなる[343][344]。2009年9月11日に、HTVを打ち上げる事を主たる目的として開発されたH-IIBロケット[345]によってHTV技術実証機 (HTV-1) が打ち上げられており[346]、2号機以降は毎年約1機ずつ計9機のHTVを打ち上げISSへ物資を輸送する予定である[93][347]。
2020年5月21日に打ち上げられ、同年8月20日に大気圏に再突入した9号機をもって「こうのとり」及びH-ⅡBロケットの運用は終了した[348]。以降は2021年度よりH-3ロケットによって打ち上げられる予定の新型宇宙ステーション補給機(HTV-X)に引き継がれる。
小型衛星放出事業
[編集]
きぼうは、国際宇宙ステーション (ISS) 内に持ち込まれた超小型衛星を自身のロボットアームを用いた小型衛星放出機構(J-SSOD)により軌道上に放出することができる。これによりロケットで直接軌道に投入するより小さい衝撃で、より多くの超小型衛星を効率的に軌道上に投入できる[293][349]。
通常のロケットでの打ち上げと比べ、放出される衛星はISSへの物資輸送機の船内貨物として打ち上げられるため、ソフトバッグと呼ばれる緩衝材[293]で包んで輸送用バッグ(CTB)に入れられた後に輸送機でISSへ運ばれる。これにより緩衝材・輸送用バッグ・輸送機与圧室・フェアリングの4重保護となり、打ち上げ時の環境条件が自動車の荷台と同じ水準にまで緩和されるため、衛星開発の負担軽減に繋がっている[286]。
きぼうを利用した衛星放出の検討が始まったのは2010年頃で、アメリカの大学が開発していたcubesat放出装置の設計をもとにJ-SSODは開発されている[293]。初めて放出されたのは、2012年10月4日に明星電気のWE WISHと和歌山大学・東北大学のRAIKO (雷鼓)、同10月5日に福岡工業大学のFITSAT-1(にわか衛星)・他海外衛星のF-1・TechEdSatの計5機で、星出彰彦宇宙飛行士が操作するきぼうのロボットアームにより世界で初めて宇宙空間に衛星を放出した[6]。
当初はCubesatのみの放出で、最大6U分の放出能力しかなかったが[292]、2016年4月27日に初めて50kg級衛星用の搭載ケースを用いて50kg級超小型衛星が放出されている[6]。2016年12月9日には、今までの3Uサイズの衛星搭載ケースを左右に2本あった6U対応のものを2段重ねにした、計12U対応の新型放出機構をHTV6号機でISSに輸送され、2017年1月16日の衛星放出時に初めて使われている[350]。少しずつ衛星放出能力が増強されているが、「きぼう」のエアロックの大きさを限界まで活用すれば、最大で約300kgの衛星を放出できると見積もられている[351]。2018年10月9日現在、これまでに34機が放出されている[6]。
2018年2月23日に、きぼう利用戦略[352]に基づくきぼう利用事業の民営化の第1弾として、2024年末までの契約で2023年度までに自立的運営を目指し技術移転を行う条件で超小型衛星放出サービス事業者の募集を開始し[353][354]、2018年5月29日に応募があった5社の中からSpace BDと三井物産が選ばれている[354][355]。
今後の計画では、2018年に6Uサイズの衛星を放出可能にし、2019年に24U相当、2020年には48U相当に能力を向上させた衛星放出機構を開発し運用する予定で、2020年以降は年間100Uの衛星放出を構想している[294][298][356]。この年間100Uの内、民間の割合が7割に、JAXAが3割になる予定である[298][354]。なお、この小型衛星放出機構(J-SSOD)を利用した衛星放出事業のJAXAでの税込み標準価格は、1Uが300万円、2Uが500万円、3Uが800万円、50kg級が1億400万円となっているが、民間事業者での価格は未定となっている[354][357]。
HTV搭載小型回収カプセル(HSRC)
[編集]HTV搭載小型回収カプセル(HTV Small Re-entry Capsule:HSRC)は、2018年9月に打ち上げられたHTV7号機に搭載された小型回収カプセルで[358]、2018年11月11日に大気圏に再突入し南鳥島沖で回収に成功している[359]。
この小型回収カプセルで、「きぼう」で行われた「低温高品質タンパク質結晶生成(Low Temperature Protein Crystal Growth:LTPCG)実験」で作られたタンパク質試料[360]と静電浮遊炉(ELF)の材料サンプル[361]を回収している。国際宇宙ステーションからの実験試料の回収は日本としては初めてで[362]、アメリカ、ロシアに次いで3か国目となった[363]。
今後はHTVなどの母船に依存せず、単独での運用ができる軌道離脱モジュールを付与した形態のカプセルを検討中で、HTV-Xでの技術実証を目指している。HTV-Xの非与圧部で回収カプセルを運び、国際宇宙ステーションの船外に一時的に設置し、「きぼう」のエアロックとロボットアームを使って実験試料などの回収物資を格納できると見られている[364]。
セントリフュージ
[編集]セントリフュージ(生命科学実験施設、Centrifuge)は、日本が「きぼう」打ち上げの見返りとして、アメリカ航空宇宙局の実験棟「セントリフュージ」における重力発生装置、生命科学グローブボックス、重力発生装置搭載モジュールの開発・製造を行い、アメリカに引き渡す予定であった施設で、1997年8月に日本とNASAはこの条件で合意しており、開発費として約430億円を見込んでいた[365][366]。人工的に0.01Gから0.01G刻みで2Gまでの重力を発生させ、生物飼育箱(Habitat:ハビタット)を最大4つ搭載し、質量1.2トンのローターが1分間に最大42回転を連続90日間行える、直径が2.5m、奥行き1.5m、質量約2トンの「重力発生装置(Centrifuge Rotor:CR)」、450リットルの隔離した作業空間で生物試料を扱う高さ2m、横1m、奥行き2m、質量約1トンの「生命科学グローブボックス(Life Sciences Globvebox:LSG)」、生物飼育箱搭載ラック(Habitat Holding Racks:HHRs)、保管ラック(Stowage Racks)、顕微鏡、冷凍冷蔵庫と、これらを搭載する外径4.4m、長さ9m、質量約10トンで15個のラックを搭載できる「重力発生装置搭載モジュール(Centrifuge Accommodations Module:CAM)」で構成されている[367][368][369]。
だが2005年(平成17年)8月31日に発表されたNASAの変更計画で「セントリフュージ」計画は中止され、2005年10月に正式に中止の通知を受け日本における開発も終了した[370][371]。「きぼう」の打ち上げに関しては、2006年3月2日に行われた「国際宇宙ステーション計画に関する宇宙機関長会議」において、日本側は「きぼう」の輸送の確保を求め、2009年までに3便全ての打ち上げに合意している[89]。
日本単独宇宙ステーション (JSS)
[編集]JAXAで構想している小型宇宙ステーション。ISS運用予定が短かった頃に構想されたもので、運用終了時に廃棄されるモジュールから設計上10年程度寿命の残っているきぼうを回収し、発展型HTVによって独自の居住モジュールやドッキングモジュール、太陽電池アレイ、推進モジュール(場合によっては打ち上げに使ったHTVの与圧キャリアや推進モジュールを流用する)を打ち上げ、組み合わせる予定であった。
成果
[編集]ISS計画への参加の意義・目標と成果
[編集]1985年4月に発表された宇宙開発委員会宇宙基地計画特別部会報告「宇宙基地計画参加に関する基本構想」の中で、「きぼう」の開発を含む日本のISS計画への参加の意義・目標として「高度技術の習得」「次世代の科学や技術の促進と宇宙活動範囲の拡大」「国際協力への貢献」「宇宙環境利用の実用化の促進」の4つが示されている[2]。
2014年5月にJAXAは、2013年までにISS計画への参加によって得られた成果について、「有人・無人宇宙技術の習得」「産業の振興」「宇宙実験からの成果の蓄積」「国際協力による外交上のプレゼンス向上への貢献」「青少年の育成」の5つを上げている[372]。「有人・無人宇宙技術の習得」については、有人打ち上げを除く自律的に有人宇宙活動を行うための技術を獲得し、その技術を獲得するのにかかった期間と費用は2013年までに28年と約8,260億円で、世界水準の有人宇宙技術を最も効率的に短期間で得たとしている[329]。「産業の振興」については、「きぼう」の開発・運用に約650社、「こうのとり(HTV)」の開発・運用に約400社の日本企業が関わっており、各企業の有人宇宙技術の習得や宇宙関連製品の海外受注に繋がるなど、宇宙産業基盤の維持向上成熟に貢献したとしている[82]。「宇宙実験からの成果の蓄積」については、宇宙環境を利用して細胞培養、植物培養、水棲生物飼育、金属・半導体結晶成長、蛋白質結晶成長、流体物理計測、X線天文観測、大気観測、地球観測などの各種実験・観測を行い、その学術的成果として査読付き論文が約900件となっている(詳細はきぼうの成果を参照)[373]。「国際協力による外交上のプレゼンス向上への貢献」については、アジア諸国(マレーシア・ベトナム等)による「きぼう」の利用を進め、国際会議の誘致や議長国を務めるなど宇宙常任理事国としての地位を確立したとしている[374]。「青少年の育成」については、JAXA保有の有人宇宙関連の写真・映像の平成25年度申請件数は4,171件(全申請件数の約4割、その内宇宙飛行士関連が1,862件)で、教科書・図鑑・テレビ番組・プラネタリウム等で利用されており、日本人宇宙飛行士による日本の小中学生との交信イベントや講演活動などを通じて、科学技術人材の育成に貢献しているとしている。また、平成25年度のJAXA関連報道はテレビが約1,000件、新聞が約2,700件で、その内約5割は有人宇宙関連報道で更にその約8割は宇宙飛行士関連報道となっており、これらの報道により日本の有人宇宙開発が青少年を含む国民の耳目に触れる機会となり、科学技術に対する興味や関心を高める一助になっている[375]。
きぼうの成果
[編集]きぼうの本格的な運用が始まった2008年8月以降[25]、生命科学、宇宙医学、技術開発、応用利用、物質科学、物理科学、宇宙物理学、人文科学、社会科学などの各分野の他、船外を利用した民生品の宇宙実証、地球観測、小型衛星放出など様々な成果が出ている[27]。ISSで行われた日本の実験は1998年12月-2013年9月までに453件[376]、きぼうを利用したミッションは設置後約5年間で約80件に上り[377]、これらの実験により2013年8月までに「きぼう」に関連した査読付き論文は925件が発表されており、学位論文(博士論文、修士論文、学部卒業論文)は85件、それ以外の総説、査読なし論文、プロシーディングス等が697件となっている[376]。また、「きぼう」利用研究者が国の競争的資金制度などの競争的資金を獲得した件数は2013年8月までに140件を超えている[376]。
これらの一連の成果については宇宙航空研究開発機構(JAXA)ホームページ内の「宇宙ステーション・きぼう広報・情報センター」にて発信されており[378]、2014年までに得られた成果をまとめた「「きぼう」利用成果レポート2014 -宇宙で得られた成果-」と題する報告書も出されている[27]。
また、国際宇宙ステーション(ISS)の参加国の内、日本(JAXA)、アメリカ(NASA)、カナダ(CSA)、欧州(ESA)、ロシア(Roscosmos)の5か国の宇宙機関は合同で、「きぼう」での成果も含むISSでの成果72事例を「国際宇宙ステーション 人類への恩恵(INTERNATIONAL SPACE STATION BENEFITS FOR HUMANITY)」と題する報告書にまとめている[351][379]。
こういった状況の中で、日本が毎年負担している「きぼう」を含むISS関連経費約350億円-400億円の費用対効果に対する批判も出ている[380]。これに対し、宇宙飛行士の油井亀美也は「成果は非常に上がっていると思っている」とした上で、「きぼう」での成果を国民に伝える広報の在り方を課題に挙げている[380]。またISS関連経費の使途についても、直接NASAなどの海外の宇宙機関にお金を支払っているわけではなく、ISSの共通的なシステム運用経費分担(CSOC、MOU第9条3項)の分担方法(IGA第15条5項、MOU第9条5項)として[13]、HTVでの物資輸送による現物提供を以て支払い、その対価として日本人宇宙飛行士をISSへ運んでもらう権利を得ており、このHTVの開発・製造・運用などで得られた宇宙開発技術の蓄積も成果の1つであるとしている[380]。向井千秋宇宙飛行士も以前に同様の考えを示しており、きぼう・HTVの開発を通じて得た有人宇宙技術・人材の蓄積も成果であるとしている[381]。
2020年8月12日(水) 午後7時45分に「きぼう」に設置されたスタジオと地球をつなぐ双方向ライブ配信実験「KIBO 宇宙放送局」を実施。
受賞歴
[編集]- 2008年4月30日 - きぼう船内保管室の組み立てを行ったSTS-123での1J/Aミッションへの貢献により、NASAが主催しNASAのフライトディレクターによって選ばれる(以下同)「Lyndon B. Johnson Space Center Group Achievement Award」をきぼう運用管制チームが、「Lyndon B. Johnson Space Center Certificate of Appreciation」を松浦真弓フライトディレクターがそれぞれ受賞している[382]。
- 2008年7月10日 - きぼう船内実験室の組み立てを行ったSTS-124での1Jミッションへの貢献により、NASAが主催する「Lyndon B. Johnson Space Center Group Achievement Award」をきぼう運用管制チームが、「Lyndon B. Johnson Space Center Certificate of Appreciation」を東覚芳夫フライトディレクターがそれぞれ受賞している[383]。
- 2010年1月15日 - きぼうの開発により、一般社団法人日本航空宇宙学会が主催する「2010年度技術賞(プロジェクト部門)」を、JAXAと三菱重工業、IHIエアロスペース、NEC、NEC東芝スペースシステム、川崎重工業、三菱電機が共同受賞している[384]。
- 2010年11月10日 - 宇宙空間での実験設備に要求される高い機能性・安全性・操作性を実現したことが評価され、2010年度グッドデザイン賞において「金賞(経済産業大臣賞)」を受賞した[38][385]。
- 2010年11月26日 - JAXAとNECが「宇宙用遠隔操作ロボット「ロボットアーム」(親アーム)」で応募し、経済産業省と一般社団法人日本機械工業連合会などが主催する「第4回ロボット大賞 日本科学未来館館長賞」を受賞している[386][387]。
- 2011年9月8日 - 「「きぼう」ロボットアームと装置交換機構による軌道上組立技術の実用化」により、一般社団法人日本ロボット学会が主催する「第16回(2011年)日本ロボット学会実用化技術賞」を受賞している[388][389]。
- 2011年9月28日 - 1997年8月7日に打ち上げられたスペースシャトルSTS-85において行われた、きぼうに実装する前の技術実証として精密ロボットアーム実験(マニピュレーター飛行実証試験、MFD:Manipurator Flight Demonstration)を世界で初めて宇宙空間で行った成果により、きぼうはアメリカ航空宇宙学会(AIAA)による「2011AIAA Space Automation andRobotics Award」をきく7号と共に受賞している[390][391][392]。
- 2014年3月28日 - きぼうの「REX-J」開発・運用チームが、一般社団法人日本機械学会が主催する「2013年度宇宙工学部門一般表彰スペースフロンティア」を受賞している[393]。
- 2014年6月19日 - きぼうの船外実験装置であるポート共有実験装置(MCE)に搭載されている「スプライト及び雷放電の高速測光撮像センサー(JEM-GLIMS)」での研究成果により、第3回ISS Research and Development Conferenceにおいて、アメリカのAmerican Astronautical Society(AAS)が主催する「ISS Research Awards(Space Station Top Results for Discoveries)」を受賞している[394][395]。
- 2016年4月20日 - きぼうの船外実験装置であるポート共有実験装置(MCE)に搭載されている「スプライト及び雷放電の高速測光撮像センサー(JEM-GLIMS)」での研究成果により、一般社団法人電気学会が主催する「第72回電気学術振興賞 進歩賞」を受賞している[396][397]。
- 2016年7月14日 - きぼうでの蛋白質結晶化実験と船外実験装置MAXIでの実験の成果により、第5回ISS Research and Development Conferenceにおいて、アメリカのAmerican Astronautical Society(AAS)が主催する「ISS Research Awards(Space Station Top Results for Discoveries)」を受賞している[398]。
- 2017年3月31日 - きぼうの小型衛星放出チームが、一般社団法人日本機械学会が主催する「2016年度宇宙工学部門宇宙賞」を受賞している[399][400]。
- 2017年7月20日 - きぼうからの超小型衛星放出の取り組みが、第6回ISS Research and Development Conferenceにおいて、アメリカのAmerican Astronautical Society(AAS)が主催する「ISS Research Awards(Innovation Award- Commercialization)」を、JAXAのJ-SSODチームとアメリカのナノラック社(NanoRacks)が共同受賞している[401]。
- 2017年7月25日 - 第50次/51次ISS長期滞在クルーの帰還記念イベントにおいて、NASAが主催する「Lyndon B. Johnson Space Center Group Achievement Award」を、きぼうのエアロックチームが受賞している[402]。
- 2017年11月13日-11月15日 - きぼうの多目的実験ラック(MSPR)に搭載されている液滴群燃焼実験装置(GCEM)の開発により、第55回燃焼シンポジウムにおいて、一般社団法人日本燃焼学会が主催する「平成29年度日本燃焼学会 技術賞」を、JAXAと株式会社IHI検査計測、日本大学、山口大学が共同受賞している[403][404]。
- 2018年3月30日 - きぼうの簡易曝露実験装置(ExHAM)開発・運用チームが、一般社団法人日本機械学会が主催する「2017年度宇宙工学部門一般表彰スペースフロンティア」を受賞している[405]。
- 2018年4月10日 - きぼうでの超小型衛星放出機構を用いた取り組みに対し、文部科学省主催の平成30年度科学技術分野の文部科学大臣表彰「科学技術賞(科学技術振興部門)」を受賞している[406][407]。
- 2018年7月14日-7月22日 - アメリカで開催されたCOSPAR 2018において、きぼうの流体実験ラックでのマランゴニ対流の実験の成果により、国際宇宙空間研究委員会(Committee on Space Research:COSPAR)とロシア科学アカデミー(Russian Academy of Sciences:RAS)が主催する「Zeldovich Medal」を、研究チームの横浜国立大学大学院の矢野大志助教が受賞している[408][409]。
- 2018年7月26日 - きぼうの船外実験装置CALETでの研究とマウス実験の成果により、第7回ISS Research and Development Conferenceにおいて、アメリカのAmerican Astronautical Society(AAS)が主催するISS Research Awardsの「2018 ISS Award for Compelling Results」を受賞している[410]。
- 2018年10月20日-10月21日 - マランゴニ対流の実験の成果により、一般社団法人日本機械学会が主催する熱工学コンファレンス2018にて行われた熱工学コレクション2018において「最優秀動画賞」を受賞している[411]。
情報漏洩事件
[編集]運用上の不具合・故障など
[編集]
- 2008年6月5日 - 船内実験室設置直後に、空気調和装置の凝縮水熱交換器出口の水分検出器が自動で停止している。これは、船内実験室が通常2名、時間制限つきで4名在室できるよう設計されている[74]のに対し、スペースシャトルのSTS-124搭乗員7人とISSの第17次長期滞在搭乗員3人の計10人の宇宙飛行士全員が船内実験室に同時に集まってしまった[97][412][413]ことにより、一時的に船内湿度が上昇したことなどが原因で水分検出器の自動停止機能が作動したためだと考えられている。前述のとおり、船内実験室はISS最大の与圧モジュールであり、ラック搬入前の船内実験室の広さに宇宙飛行士たちが「はしゃぎすぎた」のであった[414]。
- 2010年4月21日18時頃、超伝導サブミリ波リム放射サウンダ (SMILES) の受信系の機器の一部が待機モードとなったため観測を中断した。その後の調査で、原因はサブミリ波局部発振器 (SLO) 内部のガン発振器の配管内部に二酸化炭素が固着したことによる閉塞だと判明した。2011年1月19日に復旧を断念し運用を終了している[271][415]。
- 2010年5月13日、「きぼう」有償利用事業の第2回目のテーマに選ばれた「植物種子を活用した宇宙教育プロジェクトと商用利用の試み」[416]において、2009年8月より約8か月間軌道上で保管され、2010年4月に回収されたカボチャの種子2種類の内の1種類が所在不明となっていることが発覚した[417]。その後、所在不明とされていたカボチャの種子は、規定上1つのみしか宇宙へ持っていけないため軌道上に運ばれず、NASAジョンソン宇宙センターに残されていたことが確認されている[418]。
- 2018年7月18日16時頃、きぼう船内実験室で冷却水が僅かに漏れているのが見つかった[419]。1日あたり0.025-0.03リットル漏れており、原因を調べたところNASAの米国実験ラック(EXPRESS Rack 5)内の配管から漏れていることがわかった[420]ため、修理を実施している[421]。
上記のような不具合などが起きてはいるが、きぼうの不具合件数は、打上げから36か月後の2011年3月までに75件となっており、これはアメリカの実験棟デスティニーの打ち上げから48か月後の2005年2月までの175件より、不具合件数の発生頻度が少なく良好な実績を示している[19]。
展示モデル
[編集]日本実験棟「きぼう」の展示モデルは、JAXA筑波宇宙センターの展示館「スペースドーム」内に、1985年4月から行われた日本実験モジュールの予備設計時に作られた、内部にも入れる実物大模型(モックアップ)が展示されているほか[422][423]、名古屋市科学館の屋外展示スペースに実際に開発に使われた船内実験室の構造試験モデルが展示されている[424]。また、2014年7月19日-9月23日に幕張メッセで行われた宇宙博2014に船外パレットの実機が展示されたことがある [127][425]。
登場作品
[編集]- A Beautiful Planet - ドキュメンタリー映画。ISSが舞台。
- ゼロ・グラビティ - 映画。ISSでの場面で登場。
- 天穹のテロリズム - 小説。ISSが舞台。
注釈
[編集]- ^ 「管轄権」と「管理の権限」は、国連海洋法条約92条1項及び94条における公海上の船舶に対する旗国の権限と類似するものと解釈されている。具体的には、「管轄権」(jurisdiction)は「宇宙物体上で発生する事実や行為について、登録国が国内法の適用の対象とし(立法管轄権、自国領域外でも有効)、その遵守を強制する権限(執行管轄権、自国領域内のみ有効)」を指し、「管理の権限」(control)は「宇宙物体の活動に対する指令・追跡・管制など、関係国内法令に基づいて行われる事実上の規制行為」を指す。
- ^ 日本人宇宙飛行士の飛行機会の配分は、システム運用共通経費(CSOC)の分担が発生する、「きぼう」の運用開始となる与圧部の取り付けと初期検証の終了時点から始まっている。
- ^ ISS運用に係る共通的経費のことで、飲食料・消耗品などの補給物資や宇宙飛行士等の輸送経費、運用管制に係る施設の維持管理費や人件費などの地上経費がある。
- ^ 当時は「宇宙ステーション」ではなく「宇宙基地」と呼んでいた。
- ^ 宇宙ステーションは、1988年にレーガン大統領によって「フリーダム」と名付けられている。
- ^ 当初は、リデザイン3案のうちα案が選ばれたことからISSA(International Space Station Alpha)と呼ばれていた。
- ^ 日本初の無重量環境試験設備として川崎重工業によって1994年7月26日に完成したが、2011年3月11日に起きた東日本大震災により、配管の破損による水漏れなどの大きな被害を受けたため、復旧は困難として2012年2月に撤去されている。
- ^ 出典資料には、2007年5月に打ち上げ予定のATVの後にきぼうの1便目が明記されており、2009年の搭乗員6人体制確立の前にきぼうの最終便が明記されている。
- ^ STS(Space Transportation System)とはNASAの宇宙輸送システムのことで、再使用可能な有人宇宙船として構想され、後にスペースシャトル計画となった。
出典
[編集]- ^ a b c d e f g “JAXA|「きぼう」日本実験棟/国際宇宙ステーション(ISS)”. JAXA. 2018年12月15日閲覧。
- ^ a b c d e f g h i j “「きぼう」ハンドブック”. 1.3 「きぼう」開発経緯. JAXA (2008年4月). 2018年12月4日閲覧。
- ^ “(4)日本の実験棟 「きぼう」(JEM)”. 文部科学省 (2011年2月). 2019年1月19日閲覧。
- ^ a b c “宇宙開発利用 我が国の宇宙開発史 第五章日本の有人宇宙技術の発展 (1)全体計画の経緯”. 文部科学省 (2011年2月). 2019年2月12日閲覧。
- ^ a b “小型衛星放出機構(J-SSOD):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年11月2日). 2018年11月19日閲覧。
- ^ a b c d e f “放出履歴:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年10月9日). 2018年11月19日閲覧。
- ^ a b JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-23 図2-15及び図2-16
- ^ a b c d e JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-24
- ^ a b c d e f g h i j k l m “「きぼう」ハンドブック”. 1.2.2 国際宇宙ステーション計画の経緯. JAXA (2008年4月). 2018年12月4日閲覧。
- ^ “NASAへの輸送:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2007年11月16日). 2019年1月19日閲覧。
- ^ a b “「きぼう」組立ミッション:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2010年9月29日). 2019年1月19日閲覧。
- ^ a b c “「きぼう」組立第3便ミッション(2J/A)の結果及び若田宇宙飛行士の長期滞在任務完了について”. JAXA (2009年8月5日). 2019年1月17日閲覧。
- ^ a b c d “付録1 国際宇宙ステーション(ISS)計画概要(その3)”. 宇宙開発委員会 国際宇宙ステーション特別部会 -中間とりまとめ- 平成22年6月 [1]. 文部科学省 (2010年6月). 2018年12月11日閲覧。
- ^ a b c d “「きぼう」のつくり:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2014年3月17日). 2019年1月19日閲覧。
- ^ a b “「きぼう」ハンドブック”. 3.1 各要素の主要諸元. JAXA (2008年4月). 2018年11月30日閲覧。
- ^ “国際宇宙ステーション(ISS)計画の実績と成果”. JAXA (2014年4月23日). 2018年12月4日閲覧。
- ^ 宇宙にかける「きぼう」 国際宇宙ステーション計画参加活動史. 第3章 国際宇宙ステーション計画における国際協力の法的枠組み 3-17. JAXA (2011年2月28日). 2019年2月22日閲覧。
- ^ a b c “日本の実験棟「きぼう」利用の 実験環境について”. 3ページ目. JAXA (2012年10月1日). 2019年2月1日閲覧。
- ^ a b c d e f “付録1 国際宇宙ステーション(ISS)計画概要”. 文部科学省 (2014年9月29日). 2018年12月4日閲覧。
- ^ a b c d e f “船内実験装置:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年8月2日). 2018年11月16日閲覧。
- ^ a b c d e f “船外実験装置:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2018年12月28日閲覧。
- ^ JAXA『宇宙にかける「きぼう」』, 第3章 国際宇宙ステーション計画における国際協力の法的枠組み 3-18から3-20.
- ^ “国際宇宙ステーション(ISS)計画概要”. 文部科学省研究開発局 (2014年4月23日). 2019年1月25日閲覧。
- ^ “2016年~2020年のISS共通システム運用経費(次期CSOC)の我が国の負担方法の在り方について”. 文部科学省 (2015年5月20日). 2019年1月21日閲覧。
- ^ a b c “ISS・きぼうウィークリーニュース第308号”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年8月26日). 2019年1月22日閲覧。
- ^ “様々な利用とテーマの一覧:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2019年1月22日閲覧。
- ^ a b c “「きぼう」利用の成果:これまでに得られた成果”. JAXA宇宙ステーション・きぼう 広報・情報センター (2015年5月14日). 2018年12月13日閲覧。
- ^ “2024年までのISS運用延長決定及びHTV-Xの開発について”. 文部科学省 (2016年7月14日). 2019年1月22日閲覧。
- ^ “国際宇宙ステーションの運用延長参加に対する日本国政府決定について(国立研究開発法人宇宙航空研究開発機構 理事長談話)”. JAXA (2016年7月14日). 2019年1月22日閲覧。
- ^ “実機モデルの製造、組立、試験:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2007年11月16日). 2018年12月11日閲覧。
- ^ a b c “ISS計画の歩み:国際宇宙ステーション(ISS)”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年4月30日). 2018年12月4日閲覧。
- ^ JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-69.
- ^ “未来への挑戦~日本初 有人宇宙施設「きぼう」開発物語~”. 2:36-3:55. YouTube JAXA公式チャンネル (2010年4月19日). 2019年1月29日閲覧。
- ^ a b JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-31
- ^ JAXA『宇宙にかける「きぼう」』, 第3章 国際宇宙ステーション計画における国際協力の法的枠組み 3-4.
- ^ JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-54.
- ^ a b c d JAXA『宇宙にかける「きぼう」』, =第2章 宇宙ステーション計画参加活動の全体経緯 2-37 図2-22 JEM 基準コンフィギュレーション変遷
- ^ a b c d e f g “JAXA's No.037”. JAXA (2011年3月1日). 2018年11月22日閲覧。
- ^ a b c d e f JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-34から36
- ^ a b c JAXA『宇宙にかける「きぼう」』, 第12章 JEM 曝露部利用(科学と技術開発)への取り組み 12-10
- ^ a b JAXA『宇宙にかける「きぼう」』, 第12章 JEM 曝露部利用(科学と技術開発)への取り組み 12-3
- ^ “未来への挑戦~日本初 有人宇宙施設「きぼう」開発物語~”. 8:00-10:05. YouTube JAXA公式チャンネル (2010年4月19日). 2019年1月29日閲覧。
- ^ a b JAXA『宇宙にかける「きぼう」』, 第12章 JEM 曝露部利用(科学と技術開発)への取り組み 12-3及び12-10
- ^ a b JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-41から2-44
- ^ a b c d e f g “オンラインジャーナル2008年2月号/宇宙ステーション余話 第4回”. 日本プロジェクトマネジメント協会 (2008年2月). 2018年12月17日閲覧。
- ^ a b JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-45
- ^ a b c d “なぜ船内実験室より先に船内保管室が打ち上げられたのですか:よくある質問”. JAXA宇宙ステーション・きぼう 広報・情報センター (2010年8月17日). 2019年1月4日閲覧。
- ^ a b c “無重量環境試験棟:運用管制施設”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年9月12日). 2018年12月21日閲覧。
- ^ a b c d e “開発:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2007年11月16日). 2018年12月11日閲覧。
- ^ a b c d e f “《第4回》宇宙飛行士の採用基準ー宇宙のオフィスの作り方”. 『宇宙兄弟』公式サイト 小山宙哉/講談社 (2016年3月23日). 2018年12月14日閲覧。
- ^ “「きぼう」日本実験棟の開発試験の流れ”. JAXA宇宙ステーション・きぼう 広報・情報センター (1999年12月8日). 2019年2月15日閲覧。
- ^ a b “「きぼう」日本実験棟開発の歴史”. JAXA宇宙ステーション・きぼう 広報・情報センター (2007年3月13日). 2019年2月14日閲覧。
- ^ a b c “宇宙ステーション試験棟:運用管制施設”. JAXA宇宙ステーション・きぼう 広報・情報センター (2013年3月26日). 2019年2月14日閲覧。
- ^ “「きぼう」日本実験棟の全体システム試験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2002年7月4日). 2019年2月14日閲覧。
- ^ a b “実機モデルの製造、組立、試験:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2007年11月16日). 2019年2月12日閲覧。
- ^ a b c “「きぼう」船内実験室、ついに米国へ出発”. JAXA宇宙ステーション・きぼう 広報・情報センター (2003年5月4日). 2019年2月15日閲覧。
- ^ “「きぼう」船内実験室、米国到着”. JAXA宇宙ステーション・きぼう 広報・情報センター (2003年6月20日). 2019年2月15日閲覧。
- ^ “「きぼう」船内保管室、「きぼう」ロボットアーム、実験ラックの輸送”. JAXA宇宙ステーション・きぼう 広報・情報センター (2007年3月13日). 2019年2月15日閲覧。
- ^ “「きぼう」船外実験プラットフォーム、船外パレットが米国に到着:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年10月7日). 2019年2月15日閲覧。
- ^ “NASAへの輸送:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2007年11月16日). 2019年2月12日閲覧。
- ^ “打上げ整備作業:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2007年12月17日). 2019年2月12日閲覧。
- ^ “渋沢社史データベース 川崎重工業株式会社百年史 : 1896-1996. 資料・年表”. 公益財団法人渋沢栄一記念財団. 2018年11月7日閲覧。
- ^ “星出 彰彦 (JAXA宇宙飛行士)@Aki_Hoshideさん | Twitter”. Twitter (2012年2月16日). 2019年2月19日閲覧。
- ^ “第2回「きぼう」日本実験棟船外活動手順開発試験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2002年10月31日). 2019年2月18日閲覧。
- ^ “第6回船外活動手順開発試験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2006年2月17日). 2019年2月18日閲覧。
- ^ “「きぼう」日本実験棟第4回船外活動無重量シミュレーション試験”. JAXA宇宙ステーション・きぼう 広報・情報センター (1999年3月10日). 2019年2月18日閲覧。
- ^ a b “「きぼう」命名者名簿を廃棄…名付け親誰なのか不明に”. 読売新聞. 2008年3月26日時点のオリジナルよりアーカイブ。2019年1月17日閲覧。
- ^ “「きぼう」命名者名簿、宇宙機構の資料保管庫で“発見””. 読売新聞. 2008年3月28日時点のオリジナルよりアーカイブ。2019年1月17日閲覧。
- ^ JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-18.
- ^ a b JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-26.
- ^ a b “我が国宇宙政策の課題と方向性”. 内閣府 (2012年9月). 2018年12月4日閲覧。
- ^ “有人宇宙技術部門紹介パンフレット”. 11ページ目. JAXA (2018年6月). 2018年12月4日閲覧。
- ^ a b “「きぼう」日本実験棟の開発にはどんなメーカーが携わっていたのですか ?| ファン!ファン!JAXA!”. JAXA. 2018年11月23日閲覧。
- ^ a b c “三菱重工 | 日本実験モジュール「きぼう(JEM)」”. 三菱重工業. 2018年11月23日閲覧。
- ^ “日本実験モジュール“きぼう”の開発”. 三菱重工業 (2002年1月). 2018年12月4日閲覧。
- ^ IHIエアロスペース (ロケット関連技術) 国際宇宙ステーション計画Archived 2012年1月24日, at the Wayback Machine.
- ^ “国際宇宙ステーション | 宇宙開発 | 事業紹介 | 株式会社IHIエアロスペース”. IHIエアロスペース. 2018年11月23日閲覧。
- ^ “Kawasaki News 149 Winter2008”. 川崎重工業 (2008年1月). 2018年11月23日閲覧。
- ^ NEC 宇宙ソリューション きぼうArchived 2010年1月29日, at the Wayback Machine.
- ^ a b “NEC技報 Vol.64 No.1(2011年3月)宇宙特集 国際宇宙ステーション日本実験棟「きぼう(JEM)」の開発”. NEC (2011年3月). 2018年12月4日閲覧。
- ^ a b 三菱重工業 (2014年10月22日). “ISS・国際宇宙探査の取り組み及び期待について”. 5ページ目. 文部科学省. 2019年1月31日閲覧。
- ^ a b “ISS計画への参加から得られた成果について”. 13-18ページ目. 文部科学省 (2014年5月16日). 2019年1月30日閲覧。
- ^ “「きぼう」の今後の利用方針・計画について(詳細版)”. 2ページ目. 文部科学省 (2014年5月30日). 2019年1月31日閲覧。
- ^ a b c d “JAXA|日本の有人宇宙活動の原動力は「きぼう」”. JAXA (2011年10月31日). 2019年1月23日閲覧。
- ^ JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-53,2-57,2-58.
- ^ JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-38,2-41,2-46,2-47,2-53,2-55,2-57,2-58,2-61.2-66.
- ^ “よくある質問 スペースシャトルに関するQ&A スペースシャトルは最後のフライトを終えましたが、もう飛行することはできないのですか?”. JAXA宇宙ステーション・きぼう 広報・情報センター (2011年9月6日). 2019年1月25日閲覧。
- ^ “ISSとは:国際宇宙ステーション(ISS)”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年7月11日). 2019年1月17日閲覧。
- ^ a b “国際宇宙ステーション計画に関する宇宙機関長会議の結果について”. JAXA (2006年3月8日). 2019年1月17日閲覧。
- ^ “「きぼう」船内保管室打上げ・土井宇宙飛行士搭乗ミッションの結果について”. JAXA (2008年4月2日). 2019年1月17日閲覧。
- ^ a b “「きぼう」船内実験室打上げ・星出宇宙飛行士搭乗ミッションの結果について”. JAXA (2008年6月18日). 2019年1月17日閲覧。
- ^ a b c d “2J/Aミッション:「きぼう」日本実験棟 ミッション結果の要約”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年8月12日). 2019年1月18日閲覧。
- ^ a b “宇宙ステーション補給機(HTV)”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2019年1月18日閲覧。
- ^ a b “ISS・きぼうウィークリーニュース第376号”. JAXA宇宙ステーション・きぼう 広報・情報センター (2010年3月2日). 2018年11月30日閲覧。
- ^ a b “ISS・きぼうウィークリーニュース第378号”. JAXA宇宙ステーション・きぼう 広報・情報センター (2010年3月16日). 2019年1月18日閲覧。
- ^ a b “第5回船外活動:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年3月20日). 2019年1月18日閲覧。
- ^ a b c d “1Jミッション:「きぼう」日本実験棟 ミッション結果の要約”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年6月19日). 2019年1月18日閲覧。
- ^ “1Jミッション:「きぼう」日本実験棟 1|第1回船外活動”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年5月30日). 2019年1月18日閲覧。
- ^ a b c d e f “搭載ラック:1J/Aミッション”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2019年1月18日閲覧。
- ^ a b “1J/ミッション:「きぼう」日本実験棟 搭載ラック”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年5月28日). 2019年1月22日閲覧。
- ^ “1J/Aミッション - 「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年5月19日). 2018年12月3日閲覧。
- ^ “ミッション概要:1J/Aミッション”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年3月17日). 2019年1月18日閲覧。
- ^ “1Jミッション - 「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年8月5日). 2018年12月3日閲覧。
- ^ “2J/Aミッション - 「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年11月11日). 2018年12月3日閲覧。
- ^ “「きぼう」ハンドブック”. 2.1 「きぼう」の構成. JAXA (2008年4月). 2018年11月30日閲覧。
- ^ a b c d e f g “船内実験室:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年8月19日). 2018年11月30日閲覧。
- ^ a b c d e f g h “金井宇宙飛行士 ISS長期滞在プレスキット”. 付録2 「きぼう」日本実験棟概要. JAXA (2017年12月26日). 2018年11月29日閲覧。
- ^ a b “第2章 「きぼう」日本実験棟プロジェクトの概要 独立行政法人 宇宙航空研究開発機構”. 一般財団法人宇宙システム開発利用推進機構 (2008年). 2019年1月4日閲覧。
- ^ a b c d e “「きぼう」ハンドブック”. 4.1 船内実験室. JAXA (2008年4月). 2019年1月25日閲覧。
- ^ a b “「きぼう」日本実験棟のエアロック機能試験”. JAXA宇宙ステーション・きぼう 広報・情報センター (1999年8月31日). 2018年12月21日閲覧。
- ^ “「きぼう」ハンドブック”. 4-10. JAXA (2008年4月). 2018年12月28日閲覧。
- ^ a b JAXA『宇宙にかける「きぼう」』, 第5章 日本の宇宙実験システムJEM の技術開発 [Ⅰ] ―有人宇宙システム技術(与圧系)の開発と将来展望― 5-7.
- ^ a b “「きぼう」日本実験棟の共通結合機構機能試験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2000年8月17日). 2019年1月4日閲覧。
- ^ a b JAXA『「きぼう」で獲得した有人宇宙技術』, 第5章 有人システム維持機能技術~構造・機構系技術 p.45
- ^ a b “オンラインジャーナル2008年3月号/宇宙ステーション余話 第5回”. 日本プロジェクトマネジメント協会 (2008年5月). 2018年12月17日閲覧。
- ^ “「きぼう」日本実験棟フライトモデルの製造現場・インタビュー”. JAXA宇宙ステーション・きぼう 広報・情報センター (2002年10月31日). 2019年1月4日閲覧。
- ^ “1Jミッション:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年5月30日). 2018年11月23日閲覧。
- ^ “JAXAきぼうフライトディレクタ (@JAXA_JFLIGHT)さん | Twitter”. JAXA Twitter (2018年11月13日). 2018年11月23日閲覧。
- ^ “若田宇宙飛行士のISSツアー 前編”. 3:09-3:16にかけて. YouTube JAXA公式チャンネル (2014年6月8日). 2018年12月18日閲覧。
- ^ a b c “三菱電機 DSPACE/2008年5月コラムvol.2 野口飛行士、半年間の宇宙ぐらし決定。さて住み心地は?:林公代”. 三菱電機 (2008年5月). 2018年12月14日閲覧。
- ^ a b “オンラインジャーナル2008年6月号/宇宙ステーション余話 第8回”. 日本プロジェクトマネジメント協会 (2008年6月). 2018年12月14日閲覧。
- ^ “ISSにいる大西宇宙飛行士(うちゅうひこうし)と地球の子どもたちを結ぶ、リアルタイム交信!|JAXA×YAC×学研キッズネット| 宇宙のとびら-net|学研キッズネット”. 学研 (2016年9月). 2018年12月14日閲覧。
- ^ “宇宙ではどうやって寝るのですか?|ファン!ファン!JAXA!”. JAXA (2010年6月). 2018年12月15日閲覧。
- ^ “宇宙ではどうやって寝るのですか:よくある質問”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年1月4日). 2018年12月15日閲覧。
- ^ a b “油井宇宙飛行士 ISS長期滞在プレスキット”. 付録1-6. JAXA (2015年10月7日). 2018年11月20日閲覧。
- ^ “若田宇宙飛行士のISSツアー 前編”. 12:16-13:43にかけて. YouTube JAXA公式チャンネル (2014年6月8日). 2018年12月18日閲覧。
- ^ a b c “「SPACE EXPO 2014」 宇宙博2014(SPACE EXPO)実機を見る 宇宙博2014見どころ3”. 宇宙技術開発株式会社 (2014年8月27日). 2019年1月25日閲覧。
- ^ JAXA『「きぼう」で獲得した有人宇宙技術』, 第7章 有人システム維持機能技術 ~電気・通信系技術 p.69.
- ^ a b “きぼう船外実験プラットフォーム利用ハンドブック”. 2.3.5 船内・船外カメラ. JAXA (2010年9月). 2019年1月4日閲覧。
- ^ a b c “きぼう船外実験プラットフォーム利用ハンドブック”. 初版 2-8及び3-10. JAXA (2006年10月). 2019年1月4日閲覧。
- ^ a b “宇宙ステーション補給機「こうのとり」7 号機(HTV7)【ミッションプレスキット】”. 付録1-16及び付録1-17. JAXA (2018年9月5日). 2019年1月4日閲覧。
- ^ “「きぼう」ハンドブック”. 3.1 各要素の主要諸元. JAXA (2008年4月). 2019年1月4日閲覧。
- ^ a b c “きぼう船外実験プラットフォーム利用ハンドブック”. 2.3.1 ロボットアーム. JAXA (2010年9月). 2018年12月28日閲覧。
- ^ “1Jミッション 2|第2回船外活動:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年6月6日). 2019年2月15日閲覧。
- ^ a b “「きぼう」与圧壁の厚さはどのくらいですか?”. JAXA. 2018年11月30日閲覧。
- ^ a b “国際宇宙ステーションの日本の実験棟 (JEM)の安全設計について(報告)”. JAXA (2013年6月10日). 2018年11月30日閲覧。
- ^ a b “「きぼう」日本実験棟船内実験室バンパ高速衝突試験”. JAXA宇宙ステーション・きぼう 広報・情報センター (19999-09-30). 2018年12月21日閲覧。
- ^ “音声端末装置(ATU)はどんな機能があるのですか:よくある質問”. JAXA宇宙ステーション・きぼう 広報・情報センター (2010年8月17日). 2018年12月16日閲覧。
- ^ a b c d “船内保管室:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年9月12日). 2018年11月30日閲覧。
- ^ “若田宇宙飛行士のISSツアー 前編”. 7:36-7:45にかけて. YouTube JAXA公式チャンネル (2014年6月8日). 2018年12月18日閲覧。
- ^ a b “「きぼう」ハンドブック”. 4.2 船内保管室. JAXA (2008年4月). 2018年11月30日閲覧。
- ^ a b c d “JAXAデジタルアーカイブス 船内保管室(ELM-PS)の装置交換機構(EFU)に取り付けられた沿岸海域用ハイパースペクトル画像装置および大気圏/電離圏リモート探知システム実験装置(HREP)”. JAXA (2018年7月13日). 2018年12月28日閲覧。
- ^ “ELM Pressurized Section:About Kibo”. JAXA (2008年8月29日). 2019年2月26日閲覧。
- ^ “若田宇宙飛行士のISSツアー 前編”. 7:54-8:00にかけて. YouTube JAXA公式チャンネル (2014年6月8日). 2018年12月18日閲覧。
- ^ “「きぼう」ハンドブック”. 4.2 船内保管室. JAXA (2008年4月). 2019年1月25日閲覧。
- ^ a b “「きぼう」ハンドブック”. 4.3 船外実験プラットフォーム. JAXA (2008年4月). 2019年1月25日閲覧。
- ^ “宇宙ステーション補給機(HTV)、「きぼう」日本実験棟訓練”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年3月25日). 2018年12月26日閲覧。
- ^ a b c “きぼう船外実験プラットフォーム利用ハンドブック”. 初版 2-7から2-10. JAXA (2006年10月). 2018年12月26日閲覧。
- ^ “「きぼう」ハンドブック”. 4.3 船外実験プラットフォーム. JAXA (2008年4月). 2018年11月30日閲覧。
- ^ a b c d e “日本マイクログラビティ応用学会誌 Vol.28 No.1 2011 特集2:JEM「きぼう」船外実験プラットフォームを利用した科学(解説) 「きぼう」船外実験プラットフォーム利用の概要”. 日本マイクログラビティ応用学会 (2011年1月19日). 2019年2月25日閲覧。
- ^ “ISAS|第10回:「きぼう」完成!船外実験プラットフォーム利用、開始!! /きぼうの科学”. JAXA (2009年7月). 2019年2月26日閲覧。
- ^ “「きぼう」ハンドブック”. 4.3.3 構成要素. JAXA (2008年4月). 2018年11月30日閲覧。
- ^ a b c d “IHI技報 第49巻 第3号(平成21年12月発行)-宇宙開発特集号- 国際宇宙ステーション日本実験モジュール曝露部システムと運用”. IHI (2009年12月). 2018年12月27日閲覧。
- ^ a b c d e “「きぼう」ハンドブック”. 4-17から4-23. JAXA (2008年4月). 2018年12月27日閲覧。
- ^ a b “船外実験プラットフォーム:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年7月16日). 2018年12月27日閲覧。
- ^ a b “IHI Engineering Review Vol.43 No.1 2010 JEM Exposed Facility System and Operation”. IHI (2010年). 2019年1月15日閲覧。
- ^ “きぼう船外実験プラットフォーム利用ハンドブック”. 2.3 船外実験プラットフォーム以外の軌道上サービス 2-42から2-50. JAXA (2010年9月). 2018年12月27日閲覧。
- ^ “きぼう船外実験プラットフォーム利用ハンドブック”. 2.2 きぼう船外実験プラットフォームが提供するサービス 2-36から2-41. JAXA (2010年9月). 2018年12月28日閲覧。
- ^ “きぼう船外実験プラットフォーム利用ハンドブック”. 初版 2-2及び2-10. JAXA (2006年10月). 2018年12月28日閲覧。
- ^ a b c “米国SpaceX CRS-12 (SpX-12)のミッション概要”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年9月20日). 2018年12月28日閲覧。
- ^ a b c d e “宇宙ステーション補給機「こうのとり」5 号機 (HTV5)ミッションプレスキット”. 5-16. JAXA (2015年8月21日). 2018年12月28日閲覧。
- ^ a b c “ISS On-Orbit Status Report ISS Daily Summary Report – 3/27/2018”. NASA (2018年3月27日). 2024年7月4日閲覧。
- ^ a b “「きぼう」運用・利用 「きぼう」有償利用 NanoRacks ISS利用サービス 宇宙ステーション外実験 NanoRacks曝露実験サービス”. 有人宇宙システム株式会社. 2018年12月28日閲覧。
- ^ a b “「きぼう」船外利用にかかる民間事業者の企画提案募集について ~「きぼう」利用事業の民間開放 第2弾~:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2012年12月5日). 2018年12月28日閲覧。
- ^ a b “「きぼう」の利用状況と今後の予定:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年12月19日). 2018年12月28日閲覧。
- ^ a b “Instrument Overview - GEDI”. GEDI Ecosystem Lidar. 2018年12月28日閲覧。
- ^ a b c “沿岸海域用ハイパースペクトル画像装置および大気圏/電離圏リモート探知システム実験装置(HREP)”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年9月2日). 2018年12月28日閲覧。
- ^ a b “きぼう船外実験プラットフォーム利用ハンドブック”. 初版 2-8の図2.1-1. JAXA (2006年10月). 2018年12月26日閲覧。
- ^ a b c “ポート共有実験装置(MCE):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2015年4月21日). 2018年11月17日閲覧。
- ^ a b “ECOSTRESS Successfully Installed on Space Station”. ジェット推進研究所 (2018年7月6日). 2019年1月11日閲覧。
- ^ “宇宙ステーション補給機「こうのとり」7 号機(HTV7)【ミッションプレスキット】”. 1-1及び5-17. JAXA (2018年11月2日). 2019年1月11日閲覧。
- ^ a b “きぼう船外設置の宇宙環境計測ミッション装置(SEDA-AP)をISSから廃棄しました:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2004年12月15日). 2018年12月28日閲覧。
- ^ “きぼう船外実験プラットフォーム利用ハンドブック”. 1.1 きぼう船外実験プラットフォームとは. JAXA (2010年9月). 2018年11月30日閲覧。
- ^ “船外実験プラットフォーム:ISS関連用語集”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2018年11月30日閲覧。
- ^ a b “船外パレット:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年12月19日). 2018年11月30日閲覧。
- ^ a b “「きぼう」日本実験棟の構成 -船外パレット-”. 2007年7月4日時点のオリジナルよりアーカイブ。2019年2月15日閲覧。
- ^ “「きぼう」ハンドブック”. 4.4 船外パレット 4-24から4-28. JAXA (2008年4月). 2018年12月28日閲覧。
- ^ a b c d e JAXA『「きぼう」で獲得した有人宇宙技術』, 第16章 「きぼう」曝露系システムの開発成果 ~船外パレット p.160-166
- ^ “2J/Aミッション 「きぼう」船外パレット:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年6月10日). 2019年1月25日閲覧。
- ^ “「きぼう」ハンドブック”. 4.4 船外パレット. JAXA (2008年4月). 2019年1月25日閲覧。
- ^ a b c d e f “ロボットアーム:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年9月12日). 2019年1月25日閲覧。
- ^ a b c d e “「きぼう」ハンドブック”. 4.5 ロボットアーム. JAXA (2008年4月). 2019年1月25日閲覧。
- ^ a b “1Jミッション 「きぼう」ロボットアーム:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年5月28日). 2018年12月3日閲覧。
- ^ “きぼう船外実験プラットフォーム利用ハンドブック”. 初版 2-6及び2-37. JAXA (2006年10月). 2018年12月28日閲覧。
- ^ a b c d e “「きぼう」日本実験棟 運用管制チーム”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年1月13日). 2018年11月13日閲覧。
- ^ “「きぼう」ロボットアームの遠隔操作デモンストレーション#3を実施”. JAXA宇宙ステーション・きぼう 広報・情報センター (2011年12月22日). 2012年3月18日閲覧。
- ^ “ロボットアーム作業は重圧との戦い”. 朝日新聞 (2017年4月24日). 2018年12月2日閲覧。
- ^ “「きぼう」のシステム:ロボットアーム/エアロック”. JAXA宇宙飛行士金井宣茂公式ブログ「宇宙、行かない?」 (2017年11月8日). 2018年12月2日閲覧。
- ^ “MFDマニピュレーター飛行実証試験”. JAXA宇宙ステーション・きぼう 広報・情報センター (1998年6月2日). 2019年1月4日閲覧。
- ^ “第2回「きぼう」日本実験棟のロボットアーム操作性評価試験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2002年10月31日). 2019年1月4日閲覧。
- ^ “「きぼう」ハンドブック”. 4.5 ロボットアーム. JAXA (2008年4月). 2019年1月25日閲覧。
- ^ a b c d e “衛星間通信システム:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年8月19日). 2019年1月25日閲覧。
- ^ “「きぼう」ハンドブック”. 4.6 衛星間通信システム. JAXA (2008年4月). 2019年1月25日閲覧。
- ^ a b c d JAXA (2017年10月18日). “データ中継技術衛星「こだま」(DRTS)の運用終了について”. 文部科学省. 2019年1月25日閲覧。
- ^ a b “宇宙開発利用 我が国の宇宙開発史 第五章日本の有人宇宙技術の発展 (4)日本の実験棟「きぼう」(JEM)”. 文部科学省 (2011年2月). 2019年2月12日閲覧。
- ^ “「きぼう」ハンドブック”. 4.6 衛星間通信システム. JAXA (2008年4月). 2019年1月25日閲覧。
- ^ JAXA (2011年2月). “平成22年度 宇宙環境利用の展望 第1章 「きぼう」実験運用の概要 - 「きぼう」利用の舞台裏 -”. 1-2. 一般財団法人宇宙システム開発利用推進機構. 2019年1月22日閲覧。
- ^ a b JAXA (2010年4月30日). “米国および欧州におけるISS利用状況”. 文部科学省. 2019年1月22日閲覧。
- ^ a b c “宇宙ステーション補給機(HTV)HTV2ミッション”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2019年1月22日閲覧。
- ^ “「きぼう」日本実験棟において実施されていた、マランゴニ対流実験の1テーマ目が終了しました”. JAXA宇宙ステーション・きぼう 広報・情報センター (2013年2月28日). 2018年12月3日閲覧。
- ^ JAXA (2011年2月). “平成22年度 宇宙環境利用の展望 第1章 「きぼう」実験運用の概要 - 「きぼう」利用の舞台裏 -”. 1-1. 一般財団法人宇宙システム開発利用推進機構. 2019年1月22日閲覧。
- ^ “「レオナルド」(多目的補給モジュール1):国際宇宙ステーションの組立フライト17A(STS-128)”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年8月25日). 2019年1月22日閲覧。
- ^ “流体物理実験装置(FPEF):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年6月17日). 2018年11月16日閲覧。
- ^ “溶液結晶化観察装置(SCOF):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2007年12月28日). 2018年11月16日閲覧。
- ^ “タンパク質結晶生成装置(PCRF):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年9月14日). 2018年11月16日閲覧。
- ^ “画像取得処理装置(IPU):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年9月9日). 2018年11月16日閲覧。
- ^ “細胞培養装置(CBEF):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年6月16日). 2018年11月16日閲覧。
- ^ “クリーンベンチ(CB):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年8月2日). 2018年11月16日閲覧。
- ^ “温度勾配炉(GHF):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2011年2月8日). 2018年11月16日閲覧。
- ^ “多目的実験ラック(MSPR):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年2月16日). 2018年11月22日閲覧。
- ^ “燃焼実験チャンバー:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年2月16日). 2018年11月16日閲覧。
- ^ “水棲生物実験装置(AQH):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年8月2日). 2018年11月16日閲覧。
- ^ “液滴群燃焼実験供試体(GCEM):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年2月16日). 2018年11月16日閲覧。
- ^ “国際宇宙ステーション・「きぼう」日本実験棟での燃焼実験に成功~JAXAと山口大学の共同実験 Group Combustion実験(研究代表者:三上真人教授)~”. 国立大学法人 山口大学 (2017年3月3日). 2018年11月16日閲覧。
- ^ “沸騰・二相流実験供試体:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年3月16日). 2018年11月16日閲覧。
- ^ “Atomization実験が始まりました:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年8月29日). 2018年11月16日閲覧。
- ^ “次世代水再生実証システム:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年2月1日). 2018年11月16日閲覧。
- ^ a b c “宇宙ステーション補給機(HTV) 「こうのとり」5号機の主な搭載品”. JAXA宇宙ステーション・きぼう 広報・情報センター (2015年8月12日). 2019年1月22日閲覧。
- ^ “静電浮遊炉(ELF):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2016年1月19日). 2018年11月16日閲覧。
- ^ “国際宇宙ステーションNASAステータスレポート #06-35”. JAXA宇宙ステーション・きぼう 広報・情報センター (2006年7月31日). 2019年1月22日閲覧。
- ^ “→ MINUS EIGHTY LABORATORY FREEZER FOR ISS (MELFI)”. ESA. 2019年2月1日閲覧。
- ^ “SPACE SHUTTLE MISSION STS-131 Experiment Express PRESS KIT/April 2010”. 40ページ目. NASA (2010年4月). 2019年2月1日閲覧。
- ^ “国際宇宙ステーション(ISS)/きぼう利用の現状と計画”. 30-32ページ目. 文部科学省 (2010年5月14日). 2019年2月1日閲覧。
- ^ “International Space Station Facilities Research in Space 2017 and Beyond”. 16ページ目. NASA (2017年). 2019年2月5日閲覧。
- ^ “冷凍・冷蔵庫(MELFI):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2007年12月28日). 2018年11月16日閲覧。
- ^ a b c “EXpedite the PRocessing of Experiments to Space Station Rack (EXPRESS Rack)”. NASA (2019年1月16日). 2019年2月1日閲覧。
- ^ “EXPRESS Racks|NASA”. NASA (2017年10月14日). 2019年2月5日閲覧。
- ^ a b “EXPRESS Racks 4 and 5 fact sheet”. NASA (2001年7月). 2019年2月2日閲覧。
- ^ “恒久型多目的モジュール(PMM):国際宇宙ステーションの組立フライトULF5(STS-133)”. JAXA宇宙ステーション・きぼう 広報・情報センター (2010年10月26日). 2019年2月1日閲覧。
- ^ “MISCSIoONn SdYSuTEcMSting Research on the International Space Station using the EXPRESS Rack Facilities”. 4ページ目. NASA (2014年10月). 2019年2月5日閲覧。
- ^ “MISCSIoONn SdYSuTEcMSting Research on the International Space Station using the EXPRESS Rack Facilities”. 10ページ目. NASA (2014年10月). 2019年2月5日閲覧。
- ^ a b “International Space Station Facilities Research in Space 2017 and Beyond”. 27ページ目. NASA (2017年). 2019年2月5日閲覧。
- ^ “NanoRacks Platforms”. NASA (2018年9月26日). 2019年2月5日閲覧。
- ^ “ELaboratore Immagini TElevisive - Space 2 (ELITE-S2)”. NASA (2019年1月16日). 2019年2月5日閲覧。
- ^ “NanoRacks Plate Reader”. NASA (2019年1月10日). 2019年2月5日閲覧。
- ^ “TangoLab-1”. NASA (2019年1月16日). 2019年2月5日閲覧。
- ^ “Space Acceleration Measurement System-II (SAMS-II)”. NASA (2019年1月23日). 2019年2月5日閲覧。
- ^ “Microgravity Experiment Research Locker Incubator (MERLIN)”. NASA (2019年1月10日). 2019年2月5日閲覧。
- ^ “SG100 Cloud Computing Payload (SG100 Cloud Computer)”. NASA (2019年1月16日). 2019年2月5日閲覧。
- ^ “Long Duration Sorbent Testbed (LDST)”. NASA (2019年1月16日). 2019年2月5日閲覧。
- ^ “Advanced Plant Habitat (Plant Habitat)”. NASA (2019年1月30日). 2019年2月5日閲覧。
- ^ “Space Dynamically Responding Ultrasonic Matrix System (SpaceDRUMS)”. NASA (2017年4月26日). 2019年2月5日閲覧。
- ^ “ISS搭載用静電浮遊炉の概要”. 日本マイクログラビティ応用学会 (2015年1月31日). 2019年2月5日閲覧。
- ^ “MISCSIoONn SdYSuTEcMSting Research on the International Space Station using the EXPRESS Rack Facilities”. 17ページ目. NASA (2014年10月). 2019年2月5日閲覧。
- ^ a b c “ISAS|第6回:PADLES宇宙放射線計測実験がスタート! /きぼうの科学”. JAXA (2009年1月). 2019年2月26日閲覧。
- ^ “受動積算型宇宙放射線線量計(PADLES):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2015年11月11日). 2018年11月20日閲覧。
- ^ “宇宙放射線リアルタイムモニタ装置:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年3月30日). 2018年11月21日閲覧。
- ^ “PLT・MMA・UDC:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年9月29日). 2018年11月21日閲覧。
- ^ “宇宙ステーション補給機(HTV) 「こうのとり」4号機(HTV4)ミッション”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2019年2月1日閲覧。
- ^ “FPSC冷凍庫, “FROST2” 宇宙で稼働中”. ツインバード工業 (2018年4月). 2019年2月1日閲覧。
- ^ a b ““宇宙冷蔵庫”誕生秘話――ツインバードの冷蔵庫はいかにして宇宙へと羽ばたいたのか? (1/3)”. ITmedia (2014年4月11日). 2019年2月1日閲覧。
- ^ a b ““宇宙冷蔵庫”誕生秘話――ツインバードの冷蔵庫はいかにして宇宙へと羽ばたいたのか? (2/3)”. ITmedia (2014年4月11日). 2019年2月1日閲覧。
- ^ “宇宙ステーション補給機(HTV) 「こうのとり」4号機(HTV4) 搭載品”. JAXA宇宙ステーション・きぼう 広報・情報センター (2014年1月14日). 2019年2月1日閲覧。
- ^ “船内利用:「きぼう」を使ってみませんか”. JAXA宇宙ステーション・きぼう 広報・情報センター (2015年3月31日). 2019年2月1日閲覧。
- ^ ““宇宙冷蔵庫”誕生秘話――ツインバードの冷蔵庫はいかにして宇宙へと羽ばたいたのか? (3/3)”. ITmedia (2014年4月11日). 2019年2月1日閲覧。
- ^ “きぼう船外実験プラットフォーム利用ハンドブック”. 3.2.2 船外プラットフォームへの図3.2.2-1. JAXA (2010年9月). 2018年12月25日閲覧。
- ^ “我が国独自の線量計で、「きぼう」船外で初めて宇宙放射線環境モニタリング実験を開始(Free-Space PADLES実験):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2015年6月3日). 2019年1月4日閲覧。
- ^ “国際競争力ある次世代静止通信衛星の実現に必要な熱制御技術の軌道上実証実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年11月19日). 2019年1月4日閲覧。
- ^ “きぼう船外実験プラットフォーム利用ハンドブック”. 3.2.4 船外実験プラットフォーム以外の曝露宇宙環境利用. JAXA (2010年9月). 2019年1月4日閲覧。
- ^ “「きぼう」船外利用における簡易利用実験手段の概要”. JAXA (2012年4月). 2019年1月4日閲覧。
- ^ “JEM曝露部搭載型共通バス機器部(APBUS):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2004年12月15日). 2018年11月16日閲覧。
- ^ a b “2J/Aミッション:「きぼう」日本実験棟 搭載物”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年6月10日). 2019年1月22日閲覧。
- ^ a b c “きぼう船外実験プラットフォーム利用ハンドブック”. 初版 付録C JEM曝露部搭載実験装置の概要について. JAXA (2006年10月). 2018年12月28日閲覧。
- ^ “「きぼう」日本実験棟の船外実験プラットフォームに搭載しているMPAC&SEEDの回収作業が行われました。:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2010年4月10日). 2019年1月19日閲覧。
- ^ “宇宙環境計測ミッション装置(SEDA-AP)”. JAXA宇宙ステーション・きぼう 広報・情報センター (2004年12月15日). 2018年12月28日閲覧。
- ^ “宇宙環境計測ミッション装置(SEDA-AP):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年12月21日). 2018年12月28日閲覧。
- ^ “全天X線監視装置(MAXI):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年10月18日). 2018年11月17日閲覧。
- ^ “宇宙ステーション補給機(HTV) HTV-1 搭載品”. JAXA宇宙ステーション・きぼう 広報・情報センター (2009年8月27日). 2019年1月22日閲覧。
- ^ a b “超伝導サブミリ波リム放射サウンダ(SMILES):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2015年6月18日). 2018年11月17日閲覧。
- ^ “超伝導サブミリ波リム放射サウンダ(SMILES)の観測中断について”. JAXA宇宙ステーション・きぼう 広報・情報センター (2010年4月23日). 2010年4月23日閲覧。
- ^ a b “SMILESの観測ミッション終了と今後の運用について”. 文部科学省 (2011年1月19日). 2018年12月9日閲覧。
- ^ “超伝導サブミリ波リム放射サウンダ(SMILES)の成果:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2015年5月14日). 2018年11月17日閲覧。
- ^ “宇宙ステーション補給機(HTV)「こうのとり」3号機(HTV3)ミッション”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2019年1月22日閲覧。
- ^ “REXJトップ”. JAXA. 2019年2月22日時点のオリジナルよりアーカイブ。2019年3月4日閲覧。
- ^ “船外実験プラットフォーム用民生品ハイビジョンビデオカメラシステム(COTS HDTV-EF)による地球表面映像取得結果:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2012年9月11日). 2018年11月18日閲覧。
- ^ “8/19 CALET こうのとり(HTV5)とともに打ち上がりました|CALET”. 早稲田大学理工学術院理工学研究所 鳥居研究室 (2015年7月29日). 2018年12月11日閲覧。
- ^ “国際宇宙ステーション・「きぼう」日本実験棟搭載の高エネルギー電子、ガンマ線観測装置(CALET)により、世界初のテラ電子ボルト(TeV)領域の電子直接観測を開始”. JAXA (2015年10月22日). 2016年2月20日閲覧。
- ^ “高エネルギー電子・ガンマ線観測装置(CALET):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2014年4月17日). 2018年11月18日閲覧。
- ^ a b c “高エネルギー電子・ガンマ線観測装置 CALET”. JAXA (2016年3月16日). 2018年11月18日閲覧。
- ^ “CIRCについて”. 宇宙航空研究開発機構. 2016年2月20日閲覧。
- ^ “JAXAデジタルアーカイブス 次世代ハイビジョンカメラ(HDTV-EF2)を搭載した中型曝露実験アダプター(i-SEEP)の船外実験プラットフォーム(EF)への設置作業の様子”. JAXA (2017年2月8日). 2019年1月25日閲覧。
- ^ “中型曝露実験アダプター(i-SEEP):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年2月24日). 2018年11月19日閲覧。
- ^ “きぼう船外実験プラットフォーム利用ハンドブック”. 2.1.1 微小重力. JAXA (2010年9月). 2019年1月15日閲覧。
- ^ “ISS:JEM/Kibo-EF - HREP - eoPortal Directory - Satellite Missions ISS Utilization: JEM/Kibo-EF (Exposed Facility) experiments of USA HREP (HICO-RAIDS Experiment Payload)”. ESA . 2019年2月26日閲覧。
- ^ “HEO NAC International Space Station Status”. 33ページ目. NASA (2018年8月). 2019年1月13日閲覧。
- ^ “星出宇宙飛行士、小型衛星放出機構(J-SSOD)を設置:JAXA宇宙飛行士によるISS長期滞在”. JAXA宇宙ステーション・きぼう 広報・情報センター (2012年9月24日). 2018年11月20日閲覧。
- ^ “「きぼう」からの小型衛星放出実証ミッションに係る搭載小型衛星の選定結果について”. JAXA (2011年6月15日). 2018年11月23日閲覧。
- ^ “JEM ペイロードアコモデーションハンドブック - Vol. 8 - 超小型衛星放出インタフェース管理仕様書”. JAXA (2014年4月). 2018年12月28日閲覧。
- ^ “4号機の新規開発品について|ファン!ファン!JAXA!”. JAXA (2018年12月28日). 2019年2月12日閲覧。
- ^ “革新的衛星技術実証1号機について”. JAXA (2018年12月19日). 2019年2月12日閲覧。
- ^ a b c “小型衛星放出機構:ISS関連用語集”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2018年11月20日閲覧。
- ^ a b c d “宇宙と人をつなぐ架け橋となるために 小型衛星放出ミッション 主任開発員 和田勝”. JAXA (2014年8月). 2018年11月20日閲覧。
- ^ a b “「きぼう」から3カ国の超小型衛星放出 今後は48Uキューブサットへ対応を拡大”. sorae (2018年5月16日). 2018年11月20日閲覧。
- ^ a b “油井宇宙飛行士 ISS長期滞在プレスキット”. 4-19ページ目. JAXA (2015年10月7日). 2018年11月20日閲覧。
- ^ “MicroSat Deployment from the ISS|Kaber Satellite Deployer in LEO”. NanoRacks LLC. 2019年1月4日閲覧。
- ^ “Meet Space Station’s Small Satellite Launcher Suite | NASA”. NASA (2014年3月3日). 2018年11月20日閲覧。
- ^ a b c “超小型衛星放出事業の事業者募集概要 ~事業の一部民営化~”. JAXA (2018年2月27日). 2018年11月20日閲覧。
- ^ “利用状況と今後の予定:「きぼう」での実験”. 2015年1月28日. JAXA宇宙ステーション・きぼう 広報・情報センター (2015年3月12日). 2019年1月13日閲覧。
- ^ “Cloud-Aerosol Transport System (CATS)”. NASA. 2018年12月28日閲覧。
- ^ “NASA - Cloud-Aerosol Transport System”. NASA. 2018年12月28日閲覧。
- ^ “ISS to get Cloud Aerosol Transport System, a laser cannon - Daily Mail Online”. Mail Online. 2018年12月28日閲覧。
- ^ “NASA’s CATS Concludes Successful Mission on Space Station”. NASA (2017年12月7日). 2019年1月13日閲覧。
- ^ “NASA’s CATS Concludes Successful Mission on Space Station”. Operation Status. NASA (2017年11月14日). 2019年1月13日閲覧。
- ^ “ドラゴン補給機の12号機がISSに到着”. 宇宙技術開発株式会社 (2017年8月22日). 2018年12月28日閲覧。
- ^ “米国SpaceX CRS-15 (SpX-15)のミッション概要”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年7月3日). 2019年1月11日閲覧。
- ^ “ISSへの補給宇宙船、様々な最新実験機器を積み飛び立つ”. ディスカバリーチャンネル (2018年7月3日). 2019年1月11日閲覧。
- ^ “ECOsystem Spaceborne Thermal Radiometer Experiment on Space Station”. NASA (2018年8月1日). 2019年1月11日閲覧。
- ^ “「きぼう」利用 簡易曝露実験装置(ExHAM)有償利用テーマ通年募集について:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年11月16日). 2018年12月26日閲覧。
- ^ “「きぼう」ハンドブック”. 4.3 船外実験プラットフォーム. JAXA (2008年4月). 2018年12月26日閲覧。
- ^ “簡易曝露実験装置(ExHAM)を支えるロボティクス技術”. 日本航空宇宙学会. pp. 141-147 (2018年5月). doi:10.14822/kjsass.66.5_141. 2018年12月28日閲覧。
- ^ “簡易曝露実験装置(ExHAM):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年3月12日). 2018年11月20日閲覧。
- ^ “Space station to host new cosmic ray telescope”. シカゴ大学. (2013年3月11日) 2013年4月11日閲覧。
- ^ “広報誌 RIKEN 2018”. 16ページ目. 国立研究開発法人理化学研究所 (2018年6月). 2018年11月20日閲覧。
- ^ a b c “宇宙航空の最新情報マガジン JAXA's No.065”. JAXA (2016年7月1日). 2018年11月13日閲覧。
- ^ a b “運用管制施設”. JAXA宇宙ステーション・きぼう 広報・情報センター (2015年3月2日). 2019年1月25日閲覧。
- ^ a b c d e f “運用管制施設 宇宙ステーション運用棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年3月21日). 2018年11月13日閲覧。
- ^ a b “「きぼう」 ハンドブック”. 5.3 「きぼう」の運用管制. JAXA (2008年4月). 2018年11月15日閲覧。
- ^ “「きぼう」運用管制室が稼働開始:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年3月11日). 2019年1月22日閲覧。
- ^ “つくばで「きぼう」運用管制室オープン”. 朝日新聞 (2008年3月11日). 2019年1月22日閲覧。
- ^ “地上で支える人々(1J/Aミッション)”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年3月21日). 2018年11月13日閲覧。
- ^ “JAXAきぼうフライトディレクタ (@JAXA_JFLIGHT)さん | Twitter”. JAXA Twitter (2018年11月6日). 2018年11月24日閲覧。
- ^ a b “「きぼう」日本実験棟 運用管制システム”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年11月24日). 2018年11月13日閲覧。
- ^ a b c d e “金井飛行士長期滞在ミッション担当フライトディレクタ概要説明”. JAXA (2017年8月24日). 2018年11月23日閲覧。
- ^ “JAXA's 018”. JAXA (2008年2月1日). 2018年11月23日閲覧。
- ^ a b “JAXA's No.070”. JAXA (2017年10月). 2018年10月22日閲覧。
- ^ a b “「きぼう」ハンドブック”. 5.3 「きぼう」の運用管制. JAXA (2008年4月). 2018年11月30日閲覧。
- ^ “「きぼう」船内実験室利用ハンドブック”. 11ページ目. JAXA (2018年8月). 2018年11月30日閲覧。
- ^ a b “ISS計画への参加から得られた成果について”. 4-12ページ目. 文部科学省 (2014年5月16日). 2019年1月30日閲覧。
- ^ “文化・人文社会科学利用(EPO):「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2014年1月29日). 2018年11月15日閲覧。
- ^ “人文・社会科学:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2018年11月15日閲覧。
- ^ a b c d e f “実験運用管制チーム:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年1月13日). 2018年11月15日閲覧。
- ^ a b c d “「きぼう」ハンドブック”. 3.2 「きぼう」運用モード. JAXA (2008年4月). 2018年11月30日閲覧。
- ^ a b “きぼう船外実験プラットフォーム利用ハンドブック”. 初版 2-6の表2.1.3.1-1 JEM曝露部運用モードの概要. JAXA (2006年10月). 2019年1月29日閲覧。
- ^ “きぼう船外実験プラットフォーム利用ハンドブック”. 初版 1-13及び1-14. JAXA (2006年10月). 2018年12月7日閲覧。
- ^ a b c “第54次/第55次「チーム・きぼう」の紹介 その1”. JAXA宇宙飛行士金井宣茂公式ブログ「宇宙、行かない?」 (2017年8月28日). 2018年11月23日閲覧。
- ^ a b “金井宣茂 ISS長期滞在ミッション 長期滞在概要:JAXA宇宙飛行士によるISS長期滞在”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年6月7日). 2018年11月23日閲覧。
- ^ “「きぼう」での実験 利用の計画 インクリメント57/58”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年10月4日). 2018年11月23日閲覧。
- ^ “実験運用管制官チーム”. JAXA宇宙飛行士金井宣茂公式ブログ「宇宙、行かない?」 (2017年10月16日). 2018年11月22日閲覧。
- ^ a b c d e f g h “星出宇宙飛行士 ISS 長期滞在プレスキット”. 付録2.5 運用管制. JAXA (2012年7月10日). 2018年11月21日閲覧。
- ^ a b “平成22年度JAROS宇宙環境利用の展望 第1章 「きぼう」実験運用の概要 - 「きぼう」利用の舞台裏 -”. 1-12,13. 一般財団法人宇宙システム開発利用推進機構 (2011年). 2019年2月8日閲覧。
- ^ 虎野吉彦. “宇宙ステーション補給機技術実証機(HTV1) プロジェクトに係る事後評価について”. JAXA. 2019年1月18日閲覧。
- ^ “宇宙ステーション補給機(HTV) 「こうのとり」(HTV)とは”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2019年1月18日閲覧。
- ^ “宇宙ステーション補給機(HTV) 「こうのとり」(HTV)の構成”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2019年1月18日閲覧。
- ^ “JAXA|H-IIBロケット”. JAXA. 2019年1月18日閲覧。
- ^ “宇宙ステーション補給機(HTV) HTV1ミッション”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2019年1月18日閲覧。
- ^ “宇宙ステーション補給機「こうのとり」7 号機(HTV7)【ミッションプレスキット】”. 1-1. JAXA (2018年11月2日). 2019年1月18日閲覧。
- ^ “JAXA | 宇宙ステーション補給機「こうのとり」9号機(HTV9)の大気圏への再突入完了について”. JAXA | 宇宙航空研究開発機構. 2020年11月19日閲覧。
- ^ 読売新聞朝刊 2011年6月16日
- ^ “「こうのとり」6号機(HTV6)が「きぼう」に運んだ超小型衛星6機の放出に成功:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年1月16日). 2018年11月20日閲覧。
- ^ a b “JAXA's 特別増刊号”. 特集「きぼう」のさらなる利用拡大へ. JAXA (2016年3月1日). 2018年12月11日閲覧。
- ^ “きぼう利用戦略:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年8月). 2018年11月20日閲覧。
- ^ “国際宇宙ステーション(ISS)「きぼう」日本実験棟からの超小型衛星放出事業の事業者の企画提案募集(「きぼう」利用初の民間開放)について”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年2月23日). 2018年11月20日閲覧。
- ^ “国際宇宙ステーション(ISS)「きぼう」日本実験棟からの超小型衛星放出事業 民間事業者の選定結果(「きぼう」利用初の民間開放)について”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年5月29日). 2018年11月20日閲覧。
- ^ “きぼう利用戦略 「きぼう」利用成果最大化に向けて アジェンダ2020 〔第2版〕”. 22ページ目. JAXA (2017年8月). 2018年11月20日閲覧。
- ^ “「きぼう」からの超小型衛星の放出機会提供 募集案内 <有償の仕組み(試行版)>”. 6ページ目. JAXA (2014年4月). 2018年11月20日閲覧。
- ^ “宇宙ステーション補給機(HTV) 「こうのとり」7号機(HTV7)ミッション”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年). 2018年12月11日閲覧。
- ^ “JAXA|トピックス(2018年)”. JAXA (2018年11月12日). 2018年12月11日閲覧。
- ^ “「きぼう」の利用状況と今後の予定:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年10月10日). 2018年12月11日閲覧。
- ^ “JAXAきぼう利用ネットワーク(@JAXA_Kiboriyo)さん | Twitter”. JAXA Twitter (2018年11月13日). 2018年12月11日閲覧。
- ^ “「こうのとり」7号機(HTV7)大気圏再突入完了と小型回収カプセルの回収にあたって”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年11月11日). 2018年12月11日閲覧。
- ^ “宇宙から帰還、カプセル内の実験試料 JAXAに歓喜の到着”. 東京新聞 (2018年11月14日). 2018年12月11日閲覧。
- ^ “JAXA、宇宙ステーションからの直行便「HSRC」をプレスに公開”. マイナビニュース (2018年11月29日). 2018年12月11日閲覧。
- ^ “平成17年度宇宙環境利用の展望 第6章 国際宇宙ステーション(ISS)・セントリフュージ計画”. 100ページ目,107ページ目. 一般財団法人宇宙システム開発利用推進機構 (2006年). 2018年12月7日閲覧。
- ^ JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-50..
- ^ “生命科学実験施設 セントリフュージ”. JAXA宇宙ステーション・きぼう 広報・情報センター (2005年12月20日). 2018年12月7日閲覧。
- ^ “生命科学実験施設(セントリフュージ):ISS関連用語集”. JAXA宇宙ステーション・きぼう 広報・情報センター. 2018年12月7日閲覧。
- ^ “平成17年度宇宙環境利用の展望 第6章 国際宇宙ステーション(ISS)・セントリフュージ計画”. 一般財団法人宇宙システム開発利用推進機構 (2006年). 2018年12月7日閲覧。
- ^ “平成17年度宇宙環境利用の展望 第6章 国際宇宙ステーション(ISS)・セントリフュージ計画”. 108ページ目. 一般財団法人宇宙システム開発利用推進機構 (2006年). 2018年12月7日閲覧。
- ^ JAXA『宇宙にかける「きぼう」』, 第2章 宇宙ステーション計画参加活動の全体経緯 2-64,2-65.
- ^ “ISS計画への参加から得られた成果について”. 2-3ページ目. 文部科学省 (2014年5月16日). 2019年1月30日閲覧。
- ^ “ISS計画への参加から得られた成果について”. 19-32ページ目. 文部科学省 (2014年5月16日). 2019年1月30日閲覧。
- ^ “ISS計画への参加から得られた成果について”. 33-34ページ目. 文部科学省 (2014年5月16日). 2019年1月30日閲覧。
- ^ “ISS計画への参加から得られた成果について”. 35-36ページ目. 文部科学省 (2014年5月16日). 2019年1月30日閲覧。
- ^ a b c “ISS計画への参加から得られた成果について”. 45-48ページ目. 文部科学省 (2014年5月16日). 2018年12月18日閲覧。
- ^ “ISS計画への参加から得られた成果について”. 19ページ目. 文部科学省 (2014年5月16日). 2018年12月18日閲覧。
- ^ “これまでに得られた成果”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年9月28日). 2018年12月13日閲覧。
- ^ “国際宇宙ステーション 人類への恩恵”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年6月7日). 2018年12月13日閲覧。
- ^ a b c “日本の宇宙開発の力を見せたい…日の丸飛行士座談会(中)”. 読売新聞. 2017年9月3日時点のオリジナルよりアーカイブ。2019年3月5日閲覧。
- ^ “三菱電機 DSPACE コラム:読む宇宙旅行 宇宙ステーション400億円の成果って?向井千秋さん熱弁:林公代”. 三菱電機 (2014年7月10日). 2019年1月22日閲覧。
- ^ “「きぼう」運用管制チームがNASAから表彰されました”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年5月16日). 2018年12月3日閲覧。
- ^ “1Jミッションで活躍した「きぼう」運用管制チームがNASAから表彰されました”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年8月5日). 2018年12月3日閲覧。
- ^ “日本航空宇宙学会 学会賞受賞者一覧 第1回(平成3年度)~第26回(平成28年度)”. 一般社団法人日本航空宇宙学会 (2019年2月). 2019年3月5日閲覧。
- ^ “宇宙実験施設 (「きぼう」日本実験棟)”. 公益財団法人日本デザイン振興会 (2010年9月29日). 2018年11月13日閲覧。
- ^ “第4回ロボット大賞 大賞 アーカイブ - 2010受賞ロボット”. ロボット大賞 事務局 (2010年11月). 2018年11月25日閲覧。
- ^ “「きぼう」ロボットアームが「第4回ロボット大賞」にて優秀賞および日本科学未来館館長賞を受賞しました!:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2010年11月25日). 2018年11月25日閲覧。
- ^ “実用化技術賞|賞区分|日本ロボット学会”. 一般社団法人日本ロボット学会 (2011年1月1日). 2018年11月25日閲覧。
- ^ “「きぼう」ロボットアームなどによる組立技術、「日本ロボット学会 実用化技術賞」を受賞!:「きぼう」日本実験棟”. JAXA宇宙ステーション・きぼう 広報・情報センター (2011年9月12日). 2018年11月25日閲覧。
- ^ “JAXA's No.041”. JAXA (2011年11月1日). 2018年11月13日閲覧。
- ^ “「きぼう」、アメリカ航空宇宙学会「Space Automation and Robotics Award 2011」受賞!”. JAXA (2011年10月4日). 2018年11月13日閲覧。
- ^ “Space Automation and Robotics Award”. アメリカ航空宇宙学会(AIAA) (2011年9月28日). 2018年11月13日閲覧。
- ^ “「REX-J」開発/運用チーム 日本機械学会 宇宙工学部門 一般表彰スペースフロンティアを受賞!”. JAXA宇宙ステーション・きぼう 広報・情報センター (2014年4月28日). 2018年11月23日閲覧。
- ^ “「スプライト及び雷放電の高速測光撮像センサ(JEM-GLIMS)」の研究成果がNASAから表彰されました”. JAXA宇宙ステーション・きぼう 広報・情報センター (2014年6月25日). 2018年11月26日閲覧。
- ^ “Space Station Top Results for Discoveries Announced | NASA”. NASA (2014年6月19日). 2018年11月26日閲覧。
- ^ “平成28年表彰受賞者が決定しました|一般社団法人 電気学会”. 一般社団法人電気学会 (2016年4月20日). 2018年11月28日閲覧。
- ^ “JEM-GLIMS”. 北海道大学 (2016年5月27日). 2018年11月28日閲覧。
- ^ “「きぼう」で行われた日本の実験成果が、2016年の ISS Research Awards "Space Station Top Results for Discoveries"を受賞しました”. JAXA宇宙ステーション・きぼう 広報・情報センター (2016年7月15日). 2018年11月26日閲覧。
- ^ “Space Engineering 宇宙工学部門ニュースレター No.32(Web版)2016年度部門賞”. 一般社団法人日本機械学会 (2018年2月23日). 2019年3月6日閲覧。
- ^ “「きぼう」からの小型衛星放出チーム 日本機械学会 宇宙工学部門 宇宙賞を受賞!”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年4月7日). 2018年11月22日閲覧。
- ^ “「きぼう」からの超小型衛星放出の利用促進活動が、2017年の ISS Research Awards(Innovation Award- Commercialization分野)を受賞!!”. JAXA宇宙ステーション・きぼう 広報・情報センター (2017年7月21日). 2018年11月26日閲覧。
- ^ “日本の実験棟「きぼう」(JEM)エアロックチームが、JSC Group...”. JAXA Houston Office Facebook (2017年7月25日). 2018年11月29日閲覧。
- ^ “平成29年度日本燃焼学会表彰”. 一般社団法人日本燃焼学会 (2017年11月). 2018年11月29日閲覧。
- ^ “報告 日本燃焼学会より技術賞受賞 「国際宇宙ステーションにおける液滴群燃焼実験装置(GCEM)の開発」”. 株式会社IHI検査計測 (2018年4月). 2018年11月29日閲覧。
- ^ “「きぼう」簡易曝露実験装置(ExHAM)開発/運用チームが日本機械学会の宇宙工学部門スペースフロンティア受賞”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年4月6日). 2018年11月23日閲覧。
- ^ “「きぼう」超小型衛星放出プラットフォームにおける取組みが文部科学大臣表彰「科学技術賞」を受賞”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年4月19日). 2018年11月22日閲覧。
- ^ “平成30年度 科学技術分野の文部科学大臣表彰 科学技術賞 受賞者一覧”. 文部科学省 (2018年4月10日). 2018年11月22日閲覧。
- ^ “「きぼう」での流体実験の研究成果により、COSPAR 2018で"Zeldovich Medal"を受賞:「きぼう」での実験”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年8月14日). 2018年11月28日閲覧。
- ^ “Zeldovich Medals|cospar”. Committee on Space Research (2018年8月7日). 2018年11月28日閲覧。
- ^ “「きぼう」で行われた日本の実験成果が、ISS R&D Conference において、"2018 ISS Award for Compelling Results"を受賞しました”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年7月27日). 2018年11月26日閲覧。
- ^ “JAXA、「きぼう」での対流実験により熱コレ2018で最優秀動画賞を受賞”. 財経新聞 (2018年11月7日). 2018年11月28日閲覧。
- ^ “ミッションダイジェスト「きぼう」第2回組み立てミッションSTS-124(1J)”. 7:43-7:52にかけて. YouTube JAXA公式チャンネル (2009年4月7日). 2018年12月3日閲覧。
- ^ “STS-124 NASAステータスレポート#09:NASAステータスレポート(2008年まで)”. JAXA宇宙ステーション・きぼう 広報・情報センター (2008年6月5日). 2019年1月22日閲覧。
- ^ “「きぼう」船内実験室打上げ・星出宇宙飛行士搭乗ミッションの結果について”. 7ページ目 【参考2】ミッション中の主な課題と対応. JAXA (2008年6月18日). 2018年12月3日閲覧。
- ^ “超伝導サブミリ波リム放射サウンダ(SMILES)のサブミリ波受信系異常の現状について” (2010年5月26日). 2010年5月28日閲覧。
- ^ “第2回「きぼう」有償利用テーマの選定結果及び追加募集について”. JAXA (2009年6月10日). 2018年12月9日閲覧。
- ^ “宇宙ステーションから持ち帰った植物種子が紛失 - JAXAが発表”. マイナビニュース (2010年5月14日). 2018年12月9日閲覧。
- ^ “カボチャの種、NASAで発見/宇宙に運ばれず”. 四国新聞社 (2010年6月17日). 2018年12月9日閲覧。
- ^ “「きぼう」船内の冷却水リークについて”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年7月31日). 2018年12月10日閲覧。
- ^ “「きぼう」船内の冷却水リークについて(続報)”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年8月13日). 2018年12月10日閲覧。
- ^ “「きぼう」冷却水リークについて(続報)”. JAXA宇宙ステーション・きぼう 広報・情報センター (2018年8月30日). 2018年12月10日閲覧。
- ^ JAXA『宇宙にかける「きぼう」』, 第5章 日本の宇宙実験システムJEM の技術開発 [Ⅰ] ―有人宇宙システム技術(与圧系)の開発と将来展望― 5-8.
- ^ “筑波宇宙センター 展示館「スペースドーム」”. JAXA. 2018年11月22日閲覧。
- ^ “JAXA's No.042”. JAXA (2012年1月1日). 2018年11月7日閲覧。
- ^ “SPACE EXPO 宇宙博 2014|NASA・JAXAの挑戦”. 2014年9月1日時点のオリジナルよりアーカイブ。2019年1月25日閲覧。
参考文献
[編集]- 宇宙航空研究開発機構『国際宇宙ステーション計画参加活動史 : 宇宙にかける「きぼう」』レポート番号: JAXA-SP-10-007、宇宙航空研究開発機構特別資料〈宇宙航空研究開発機構特別資料〉、2011年。
- 宇宙航空研究開発機構『国際宇宙ステーション日本実験モジュール「きぼう」で獲得した有人宇宙技術』レポート番号: JAXA-SP-12-015、宇宙航空研究開発機構特別資料〈宇宙航空研究開発機構特別資料〉、2013年。
関連項目
[編集]- Int-Ball(正式名称:JEM自律移動型船内カメラ) - JAXAが開発し、2017年に1号機をISSのきぼうモジュールに送った自律移動可能な球形の船内カメラ。
外部リンク
[編集]- 宇宙ステーション・きぼう広報・情報センター
- 「きぼう」日本実験棟 - JAXA
- 「きぼう」ハンドブック
- 「きぼう」船内実験室利用ハンドブック初版
- きぼう船外実験プラットフォーム利用ハンドブック初版
- Kibo Japanese Experiment Module - アメリカ航空宇宙局
- 宇宙特集国際宇宙ステーション日本実験棟「きぼう(JEM)」の開発 - NEC技報 Vol.64(2011年) No.1(3月)
- 宇宙ステーション日本実験モジュール“きぼう”の打上げ及び長期有人運用の開始 - 三菱重工技報 2008年 VOL.45 NO.4
- 国際宇宙ステーション(ISS)計画概要 - 2014年4月22日 宇宙開発利用部会 国際宇宙ステーション・国際宇宙探査小委員会(第1回)配付資料(PDF:3.2MB)
| 概要 |  | ||||||
|---|---|---|---|---|---|---|---|
| 構成要素 | |||||||
| 支援機材 | |||||||
| 複数回使用 | |||||||
| キャンセル | |||||||
| 補給機 |
| ||||||