
ナビカム

ナビカム(英語: Navcam)は、ナビゲーションカメラ(英語: navigational camera)の略で、科学機器に干渉することなくナビゲーションに使用される特定のロボットローバーまたは宇宙船に見られるタイプのカメラ[1][2][3]。ナビカムは通常、車両の次の動きを計画するために使用される広角写真を撮影する[4]。またはオブジェクトトラッキング[1]。
概要
[編集]火星のキュリオシティローバーには、地上ナビゲーションをサポートするためにマストに取り付けられた2組の白黒ナビゲーションカメラがある。カメラの画角は45度で、可視光を使用して立体3D画像をキャプチャする[5]。これらのカメラは、マーズ・パスファインダーミッションのカメラと同様に、ICER画像圧縮形式の使用をサポートしている。
欧州宇宙機関のロゼッタ宇宙船は、5度の視野と12ビットの1024x1024pxの解像度を備えた単一のカメラを使用して、小惑星と最後に彗星への各宇宙船の接近を視覚的に追跡できるようにした[1]。
ギャラリー
[編集]-
 2つのナビカムを備えたキュリオシティローバーのマスト
2つのナビカムを備えたキュリオシティローバーのマスト -
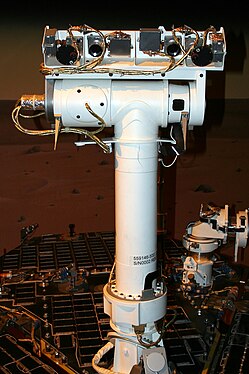 2つのパンカム(側面)と2つのナビカムを備えたマーズ・エクスプロレーション・ローバーのマスト
2つのパンカム(側面)と2つのナビカムを備えたマーズ・エクスプロレーション・ローバーのマスト -
 オポチュニティのナビカムの画像の例
オポチュニティのナビカムの画像の例 -
 キュリオシティ のナビカムの最初の画像
キュリオシティ のナビカムの最初の画像




関連項目
[編集]脚注
[編集]- ^ a b c “Comet 67P/C-G in Rosetta’s navigation camera”. ESA. 15 August 2015閲覧。
- ^ “The rover's "eyes" and other "senses"”. Mars Exploration Rover Mission. NASA Jet Propulsion Laboratory. 7 March 2004時点のオリジナルよりアーカイブ。3 January 2013閲覧。
- ^ “How A Team Of Scientists Dropped A One-Ton Science Lab On Mars Completely Unscathed”. The Business Insider. (17 December 2012)
- ^ “More Driving And Imaging At 'Matijevic Hill'”. Space Daily. (November 26, 2012)
- ^ First NavCam mosaic

| ペイロード | .jpg) | ||||||
|---|---|---|---|---|---|---|---|
| ローバー搭載機器 | |||||||
| 特徴 |
| ||||||
| 提案 着陸地点 |
| ||||||
| 関連 | |||||||