
「当て舵」の版間の差分
削除された内容 追加された内容
ページ「Countersteering」の翻訳により作成 |
編集の要約なし |
||
| (同じ利用者による、間の4版が非表示) | |||
| 5行目: | 5行目: | ||
== 使い方 == |
== 使い方 == |
||
[[ファイル:Countersteering_with_scooter_-_Montage_of_four_images.png|右|サムネイル| カウンターステアリングのさまざまな段階を示す画像モンタージュ。 ここでは、スクーターが左に曲がるようにカウンターステアがなされている ]] |
[[ファイル:Countersteering_with_scooter_-_Montage_of_four_images.png|右|サムネイル| カウンターステアリングのさまざまな段階を示す画像モンタージュ。 ここでは、スクーターが左に曲がるようにカウンターステアがなされている ]] |
||
カウンターステアリングとして、左に旋回すると、以下が実行されます。 |
|||
* 右側のハンドルバーにトルクがかかります。 |
|||
* 次に、前輪がステアリング軸を中心に右に回転し、タイヤが右の接触パッチに力を生成します。 |
|||
* 機械全体が右に舵を取る |
|||
* 接触パッチの力が地面レベルにあるため、これにより、車輪が「下から」自転車を右に引っ張り、左に傾きます。 |
|||
* ライダー、またはほとんどの場合、自転車の固有の安定性は、前輪を左に戻し、希望する方向に回転させるのに必要な操舵トルクを提供します。 |
|||
* 自転車は左に曲がり始めます。 |
|||
これは複雑な一連の動作のように見えますが、自転車に乗るすべての子供によって実行されます。シーケンス全体はほとんどのライダーがほとんど気づかないため、一部のライダーはそうしないと主張しています。 |
|||
また、特定のターンに必要なリーンを開始するのに必要な操舵トルクを、一定の半径とリーン角度をターンから出る時間まで維持するのに必要な持続ステアリングトルクとステアリング角度から区別することも重要です。 |
|||
* 最初の操舵トルクと角度は、両方とも目的の方向転換と反対です。 |
|||
* 持続する操舵角は、旋回と同じ方向です。 |
|||
* トルクがその操舵角を維持するために必要な持続ステアターンまたは反対側のいずれかである前進速度、自転車ジオメトリ、合わせた自転車及び乗り手質量分布に依存方向。 |
|||
自転車は、自転車とライダーの[[重心]]が旋回の速度と旋回半径に適した角度で旋回の内側に傾いた場合にのみカーブを調整可能。 |
自転車は、自転車とライダーの[[重心]]が旋回の速度と旋回半径に適した角度で旋回の内側に傾いた場合にのみカーブを調整可能。 |
||
: |
:<math>\theta = \arctan \left (\frac{v^2}{gr}\right )</math> |
||
| ⚫ | <ref name="Wilson">{{Cite book|title=Bicycling Science|edition=Third|last=Wilson|first=David Gordon|last2=Jim Papadopoulos|year=2004|publisher=The MIT Press|isbn=0-262-73154-1|pages=[https://archive.org/details/isbn_9780262731546/page/270 270–272]|url=https://archive.org/details/isbn_9780262731546/page/270}}</ref> |
||
より高速でタイトなターンには、より大きな傾斜角が必要です。マスが最初にターンに傾いていない場合、ライダーとバイクの慣性により、タイヤがカーブに沿って下から追跡されるため、ライダーとバイクは直線で継続します。 |
|||
| ⚫ | <ref name="Wilson">{{Cite book|title=Bicycling Science|edition=Third|last=Wilson|first=David Gordon|last2=Jim Papadopoulos|year=2004|publisher=The MIT Press|isbn=0-262-73154-1|pages=[https://archive.org/details/isbn_9780262731546/page/270 270–272]|url=https://archive.org/details/isbn_9780262731546/page/270}}</ref> |
||
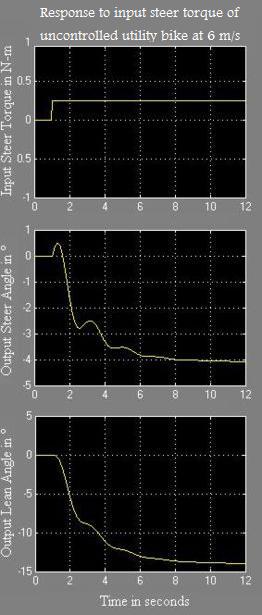
[[File:Countersteer_response.JPG|サムネイル|615x615ピクセル| 安定範囲 (この場合は6 m / s)の前進速度で、正の操舵トルク(右)で始まる典型的な自転車の制御されていない単純化されたモデルのリーンおよびステアリング角度応答を示すグラフインパルスとして、その後は一定のまま。最初の右への舵角左への傾き、そして最終的には左への定常状態の傾き、左への舵角、したがって左への旋回を引き起こす。 ]] |
[[File:Countersteer_response.JPG|サムネイル|615x615ピクセル| 安定範囲 (この場合は6 m / s)の前進速度で、正の操舵トルク(右)で始まる典型的な自転車の制御されていない単純化されたモデルのリーンおよびステアリング角度応答を示すグラフインパルスとして、その後は一定のまま。最初の右への舵角左への傾き、そして最終的には左への定常状態の傾き、左への舵角、したがって左への旋回を引き起こす。 |リンク=Special:FilePath/Countersteer_response.JPG]] |
||
== マルチトラック車両 == |
== マルチトラック車両 == |
||
2020年3月13日 (金) 15:23時点における版
カウンターステアリング(Counter steering、当て舵)編集途中 サイクリングやモーター サイクリング、舵などで車両運転者が目的の方向に瞬間的に反対方向にステアリング操作する、特定の方向へのターンを開始するために行う行為。 [1] [2] [3]

使い方

カウンターステアリングとして、左に旋回すると、以下が実行されます。
- 右側のハンドルバーにトルクがかかります。
- 次に、前輪がステアリング軸を中心に右に回転し、タイヤが右の接触パッチに力を生成します。
- 機械全体が右に舵を取る
- 接触パッチの力が地面レベルにあるため、これにより、車輪が「下から」自転車を右に引っ張り、左に傾きます。
- ライダー、またはほとんどの場合、自転車の固有の安定性は、前輪を左に戻し、希望する方向に回転させるのに必要な操舵トルクを提供します。
- 自転車は左に曲がり始めます。
これは複雑な一連の動作のように見えますが、自転車に乗るすべての子供によって実行されます。シーケンス全体はほとんどのライダーがほとんど気づかないため、一部のライダーはそうしないと主張しています。
また、特定のターンに必要なリーンを開始するのに必要な操舵トルクを、一定の半径とリーン角度をターンから出る時間まで維持するのに必要な持続ステアリングトルクとステアリング角度から区別することも重要です。
- 最初の操舵トルクと角度は、両方とも目的の方向転換と反対です。
- 持続する操舵角は、旋回と同じ方向です。
- トルクがその操舵角を維持するために必要な持続ステアターンまたは反対側のいずれかである前進速度、自転車ジオメトリ、合わせた自転車及び乗り手質量分布に依存方向。
自転車は、自転車とライダーの重心が旋回の速度と旋回半径に適した角度で旋回の内側に傾いた場合にのみカーブを調整可能。

より高速でタイトなターンには、より大きな傾斜角が必要です。マスが最初にターンに傾いていない場合、ライダーとバイクの慣性により、タイヤがカーブに沿って下から追跡されるため、ライダーとバイクは直線で継続します。
マルチトラック車両


その他の用途

ノート
- ^ Sheldon Brown. “Countersteering”. 2012年11月9日閲覧。 “"Countersteering" refers to the momentary motion of the handlebars in the opposite direction of the desired turn.”
- ^ "Curriculum for driving licenses A1, A2 and A"/"Læreplan Førerkortklasse A1, A2 and A". Norwegian Public Roads Administration. (2013). p. 55
- ^ Leif Klyve; Henry Enoksen; Gunnar Kubberød. Full Kontroll. Norwegian Motorcycle Union. p. 15. ISBN 82-92276-00-9. オリジナルの8 October 2008時点におけるアーカイブ。
- ^ Wilson, David Gordon; Jim Papadopoulos (2004). Bicycling Science (Third ed.). The MIT Press. pp. 270–272. ISBN 0-262-73154-1
参照文献
- Vittore Cossalter; R. Lot; M. Peretto (2007). “Steady turning of motorcycles”. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering 221 (11): 1343–1356. doi:10.1243/09544070jauto322. ISBN 978-1-4303-0861-4.(
 要購読契約)
要購読契約) - Leif Klyve; Henry Enoksen; Gunnar Kubberød (2006). "Full Control"/"Full Kontroll". Norwegian Motorcycle Union. ISBN 82-92276-00-9. オリジナルの8 October 2008時点におけるアーカイブ。
外部リンク
- バランスとステアリング 、 Tony Foale作
- フルコントロール(英語版) 、 ノルウェーオートバイ連合
- 「No.BSマシン」物理実験
- 「フィジックスオブユニサイクリング」 5分、基本的な物理原理からのカウンターステアについて説明。AdobeFlashが必要